Kollision
Die Reibung ist ein Maß für die bremsende Kraft, die ein Objekt erfährt, wenn es über ein anderes rutscht bzw. für die Kraft, die es erfordert, bis ein ruhendes Objekt anfängt zu rutschen. In der Physik wird zwischen Haft- und Gleitreibung unterschieden. Cinema 4D macht diesen Unterschied nicht, sondern fasst diese in dem einzigen Parameter Reibung zusammen.
Reibung findet nur statt, wenn der Kollisionsfall eintritt!
Beachten Sie, das bei der Reibung immer 2 Objekte als Kollisionspartner beteiligt sind, die jeweils eigene Reibungswerte definiert haben können. Hat ein Objekt den Reibungswert 0, kann die Reibung zwischen beiden auch durch hohe Werte des anderen Objekts nicht vergrößert werden.
Allgemein gilt, je höher der Wert (dieser kann auch wesentlich größer als 100% sein), desto weniger rutscht ein Objekt auf einem anderen und desto eher rollt bzw. überschlägt es sich, wenn die Geschwindigkeiten groß genug sind.
Sollten Sie die in der Physik ebenfalls existierende Rollreibung vermissen: diese wird bis zu einem gewissen Maß durch die Einstellung Dämpfung in den Simulationsseinstellungen simuliert (allerdings verlangsamt Dämpfung auch lineare Bewegungen).
Bei Kollisionen definiert diese Einstellung, mit welcher Kraft das Rigid Body zurückprallt. Erhöhen Sie diesen Wert nur vorsichtig, da die Simulation ansonsten zum Explodieren neigt, wenn hier zu hohe Werte eingestellt werden (es wird dabei analog zu einem Perpetuum Mobile Energie ins Simulationssystem gebracht, was zu Instabilitäten neigt).
Kleine Werte lassen Rigid Bodies wie einen Sandsack kollidieren, während steigende Werte sie zunehmend voneinander wegfedern lassen, bis sie dann bei sehr hohen Werten explosionsartig wegspringen.
Um eine Simulation möglichst schnell zur Ruhe zu bringen, sollten Sie hier nur sehr kleine Werte verwenden.
Die Charakteristik von Klebrigkeit ähnelt der von feuchtem Sand. Wenn also viele kleine Rigid Bodies zusammentreffen, bilden diese Klumpen.
Wenn z.B. ein klebriger Zylinder über einen solchen Rigid-Body-Haufen rollt, kommt es zum abgebildeten Effekt.
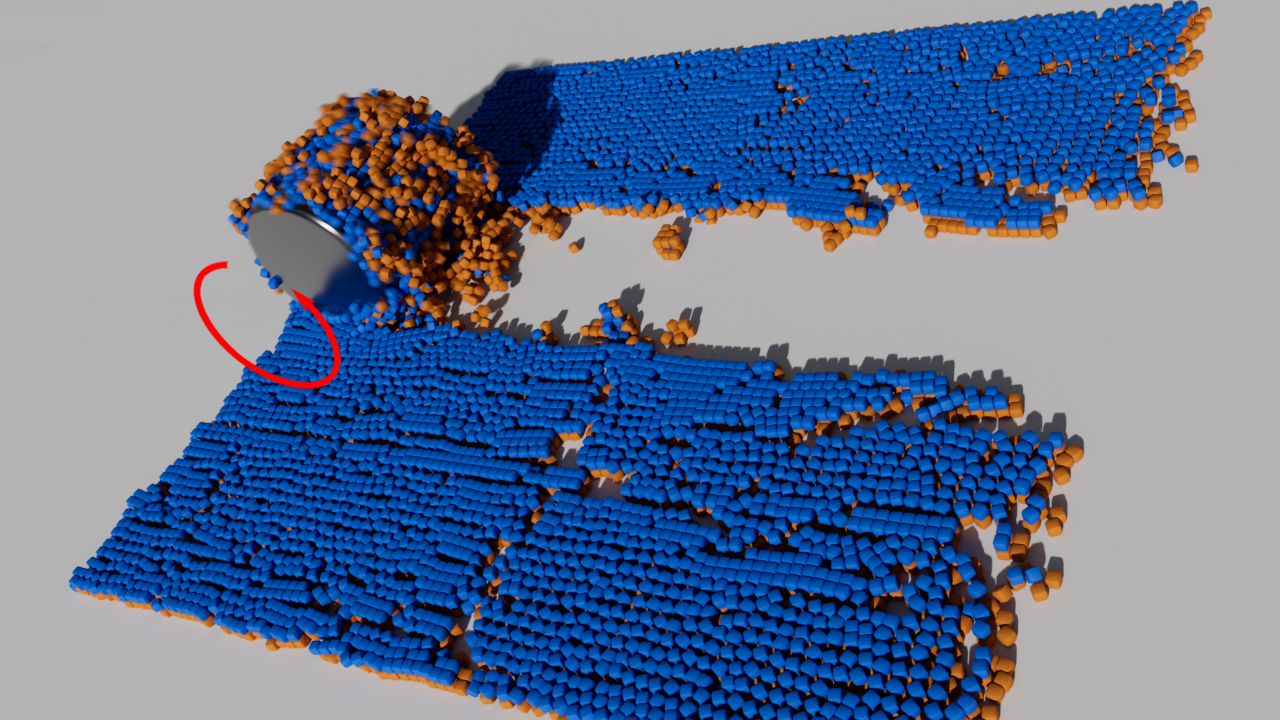
Klebrigkeit ist weniger gut für große Objekte geeignet, die Sie zusammenkleben wollen; obwohl das bis zu einem Grad auch funktioniert: allerdings kleben diese dann meist nur an ihren Ecken zusammen.
Parameter namens Dicke werden bei Simulationen stets verwendet, um Durchdringungen möglichst zu vermeiden. Es handelt sich dabei um eine Art Sicherheitsabstand um das Simulationsobjekt herum, ab dem der Kollisionsfall eintritt und der Algorithmus versucht, die kollidierenden Elemente auseinander zu halten.
Sollte es also zu sichtbaren Durchdringungen kommen, sollten Sie den Wert behutsam vergrößern.
Für Würfel gilt der Spezialfall: bei ebenfalls eingestellter FormQuader kann lückenlos gestapelt und kollidiert werden!
Es liegt in der Natur der Sache, dass es keine absolut perfekten Kollisionen gibt. Sie sollten immer darauf vorbereitet sein, dass es kleinere Durchdringungen und Lücken geben wird. Sie können aber optimieren. Z.B. mit KollisionsformenKonvexe Hülle kommt es bei vertretbaren Rechengeschwindigkeiten zu relativ genauen Kollisionen.
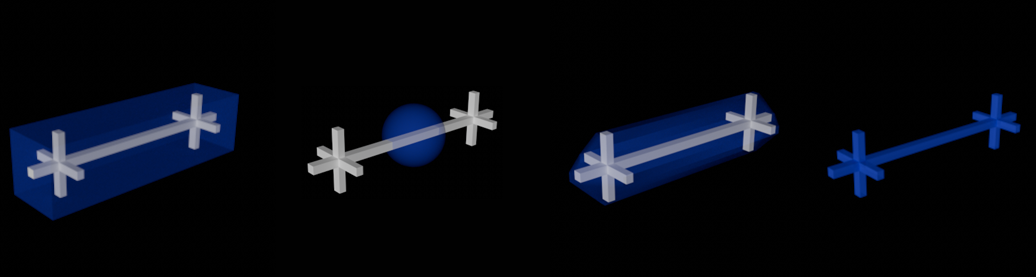 Von links nach rechts: Kollisionsformen in blau: Quader, Kugel, Konvexe Hülle (Geometriegenauigkeit = 0, kann mit höheren Werten aber sehr stark verbessert werden), Dreiecksmesh.
Von links nach rechts: Kollisionsformen in blau: Quader, Kugel, Konvexe Hülle (Geometriegenauigkeit = 0, kann mit höheren Werten aber sehr stark verbessert werden), Dreiecksmesh.
Kollisionsabfrageberechnungen sind im Allgemeinen eine rechenzeitaufwendige Angelegenheit. Nur sie führen allerdings zu glaubhaften Objektbewegungen: Körper können mit anderen zusammenprallen, aufgrund von Reibung zur Ruhe kommen etc.
Je komplexer der Körper in seiner Gestalt, desto aufwendiger ist seine Kollisionsberechnung. Es gibt deshalb in diesem Auswahlmenü einige schnell zu berechnende Ersatzformen, die über das tatsächliche Objekt gestülpt werden können. In der Simulation lässt sich von weiten oft gar nicht erkennen, ob jetzt die tatsächliche Objektgestalt zur Kollisionsberechnung herangezogen wurde oder z.B. nur ein automatisch auf die Objektgröße angepasster Quader.
Die Reihenfolge bzgl. Rechengeschwindigkeit und Kollisionspräzision ist ungefähr diese (von schnellster/unpräzisester zu langsamster/präzisester): Quader, Kugel, Konvexe Hülle, Dreiecksmesh. Im einzelnen:
Auto
Sollte Cinema 4D feststellen, dass die Grundobjekte Würfel und Kugel verwendet wurden, so werden diese intern automatisch mit den Optionen Quader und Kugel berechnet. Ansonsten wird Konvexe Hülle verwendet (die voreingestellte Geometriegenauigkeit 5 wird für die meisten Fälle ausreichen und wird immer noch sehr schnell auf Kollision geprüft).
Achtung, Auto gibt es nur bei Rigid Bodies, nicht bei Kollisionsobjekten!
Dreiecksmesh
Das Tag tragende Objekt wird mit seiner kompletten Form als Kollisionsform definiert, womit diese Option die langsamste, aber bzgl. der Kollision die beste ist, da die exakte Objektform zur Kollisionsberechnung herangezogen wird.
Allerdings kann Konvexe Hülle mit höherer Geometriegenauigkeit oft ähnlich gute Kollisionen, aber wesentlich schneller berechnen.
Hierbei werden eine oder mehrere einhüllende Formen um das Objekt bzw. dessen Teile gelegt, die sich sich ähnlich einer Gummihaut verhalten. Es wird dabei der Parameter Geometriegenauigkeit eingeblendet, mit dem die Anzahl der “Gummihäute” festgelegt wird.
Diese Ersatzformbildung funktioniert übrigens genau wie schon beim Platzierungswerkzeug unter Genauigkeit beschrieben.
Möchten Sie sich die Kollisionsform anzeigen lassen, so aktivieren Sie in den Projektvoreinstellungen im Tab “Simulation” die Option Rigid Body Formen. Dazu müssen Sie die Simulation starten, bzw. vom Startbild ein Bild weiter springen.
Kugel
Als Kollisionsform wird eine in die Objekt-Bounding-Box eingepasste Kugel verwendet.
Quader
Als Kollisionsform wird der kleinste Quader verwendet, der alle Objektpunkte einschließt.
Hier können Sie einstellen, von welcher Polygonseite aus auf Kollisionen geprüft werden soll. Sie haben die Auswahl unter:
- Vorne: Kollisionen finden nur statt, wenn sich Kollisionskomponenten von außen (bzgl. der Normalen) nähern.
- Hinten: Kollisionen finden nur statt, wenn sich Kollisionskomponenten von hinten (bzgl. der Normalen) nähern.
- Beide: Kollisionen finden von beiden Seiten aus statt.
Diese Einstellung wird immer dann interessant, wenn es zu Durchdringungen bei Kollisionen kommt. Durchdringungen sind in den seltensten Fällen gewünscht. Einmal ineinander steckende Objekte ließen sich bei der Einstellung Beide nur schwer wieder trennen. Haben Sie hingegen Vorne aktiviert, wird dem Trennen der beiden Objekte kein Widerstand entgegengesetzt - im Gegenteil, dort, wo es sinnvoll ist, wird intern zusätzlich sogar ein kleiner Impuls aus der Oberfläche heraus angelegt, um die Objekte möglichst auseinander zu halten.
Geometriegenauigkeit[0.00..+∞]
Dieser Parameter wird eingeblendet, wenn unter Kollisionsformen Auto (nur Rigid Bodies) oder Konvexe Hülle ausgewählt ist (s.a. Konvexe Hülle).
Mit zunehmenden Werten hier nähert sich die Kollisionsform der eigentlichen Objektform an ohne diese allerdings exakt zu erreichen: die Berechnung geht aber wesentlich schneller vonstatten als bei Dreiecksmesh.
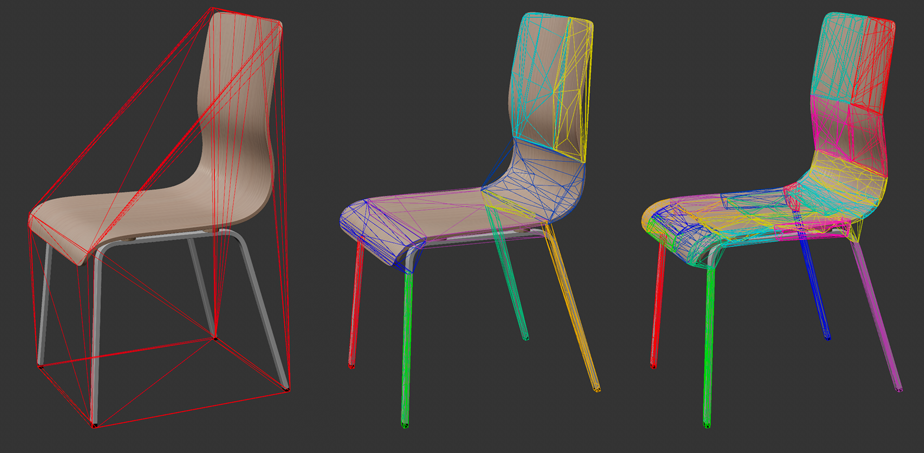
Bei einem Wert von 0 werden zurückspringende Einbuchtungen bzw. Aussparungen oder Löcher nicht in die Kollisionsberechnung mit aufgenommen, sondern nur eine einzelne “Gummihaut” um das Objekt gelegt, wie links gezeigt:
Hierarchieebenen zusammenfassen[0..2147483647]
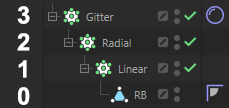
Klonerzeugenden Generatoren wie Klon- oder Array-Objekt können durch Verschachtelung weiter vervielfältigt werden (diese Einstellung funktioniert also nur, wenn das Tag auf einem solchen Objekt liegt). Wenn ein Kloner z.B. einen Würfel erst linear klont und dann ein zweiter Kloner das ganze Klonglomerat erneut radial vervielfältigt, um es dann in einem Gitter zu klonen, geben Sie mit den Zahlen hier die Hierarchieebenen an, die jeweils als eigenes Rigid Body funktionieren soll. Es wird dabei von unten gezählt: 0 macht jeden einzelnen Klon zum Rigid Body, 1 nur die erste Klon-Hierarchie (im Beispiel der Linear-Kloner) usw. In gezeigtem Beispiel würde 3 dann das gesamte Klon-Konglomerat als einen einzigen Rigid Body betrachten.
Genauso funktionieren ganz normale Hierarchien, die unter dem Tag-tragenden Objekt liegen (also keine weiteren Kloner wie in obigem Beispiel). Beachten Sie, dass derzeit ansonsten nur bearbeitbare Objekte wie beschrieben funktionieren (also z.B. keine Grundobjekte, machen Sie diese durch Druck auf Taste “C” bearbeitbar).
In Cinema 4D gibt es viele Möglichkeiten, Objekte per Deformer zu modifizieren. Soll diese Verformung als Kollisionsform verwendet werden, so aktivieren Sie diese Option. Animierte Deformationen werden derzeit nicht unterstützt - es wird die Form beim Simulationsstart verwendet.