Nota:En esta pestaña encontrará algunos ajustes que aún no funcionan para el sistema Simulate, sino sólo para la antigua dinámica Bullet. Se trata de Binding, por ejemplo. Por favor, ignórelos cuando utilice el sistema de simulación.
Tipo
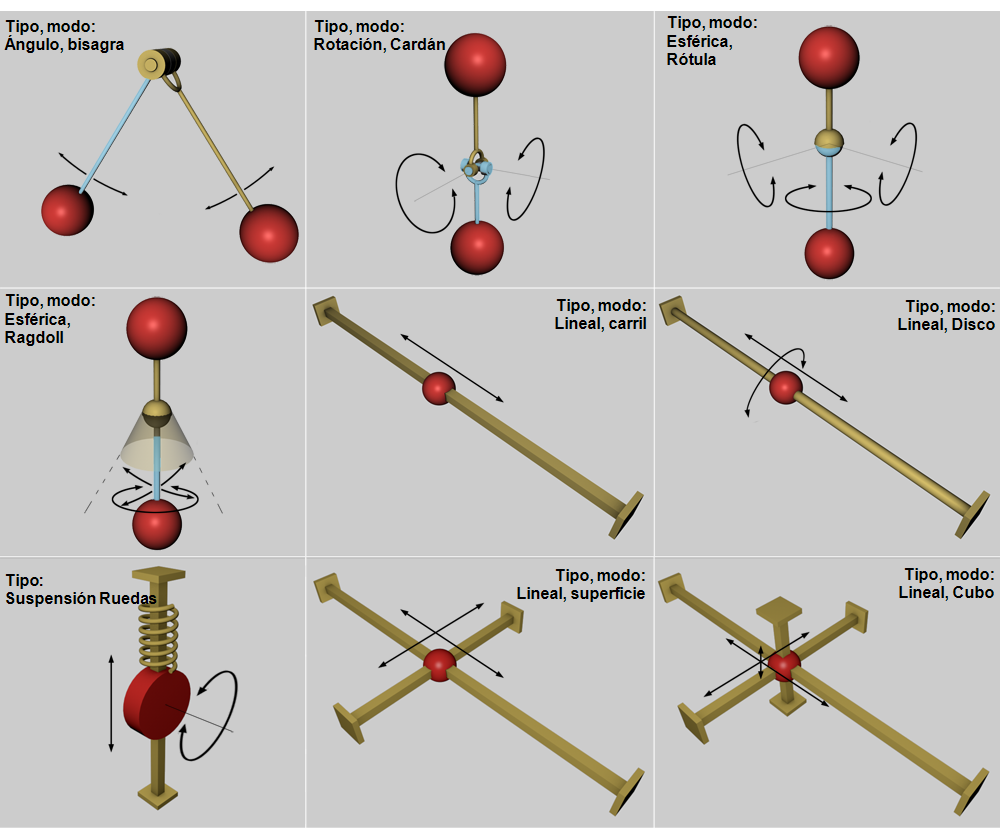
Los distintos conectores. El modo Fijo no se muestra.
Básicamente, se pueden definir 5 tipos de conectores con Tipo (que corresponden a los 5 comandos de Simular | Conectores en el menú principal), que luego se pueden definir con más detalle con Modo. Estos modos están disponibles:
Modo
Fijo
Esto no permite ningún movimiento relativo entre los objetos. Esto permite conectar objetos formados por piezas individuales.
Bisagra
Una bisagra sólo permite un movimiento de rotación alrededor del punto central de la bisagra. El movimiento de rotación se produce exclusivamente en el plano que abarcan los ejes X e Y del conector.
El ángulo de movimiento puede restringirse.
Cardán
En principio, una junta universal está formada por 2 bisagras unidas a una cruz desplazada 90°. Esto da lugar a movimientos relativamente complicados.
La aplicación típica de una junta universal es la transmisión de par en curvas. Para que esto funcione, deben cumplirse 2 requisitos previos:
Los ejes de rotación de los dos objetos conectados deben intersecarse
El conector debe encontrarse exactamente en la intersección de los dos ejes de rotación
La junta universal puede tener ángulo limitado en ambos ejes de rotación.
Rótula
Una rótula permite la rotación en las 3 dimensiones. La articulación del hombro en el cuerpo humano, por ejemplo, es una rótula.
Ragdoll
Un conector Ragdoll es una rótula (véase más arriba) con una restricción cónica de ángulo ajustable. Además, se puede definir una restricción angular de la rotación del eje alto.
El término "ragdoll" refleja el uso previsto del conector: por ejemplo, puede utilizarse para algunas articulaciones humanas, como la de la cadera o el hombro:
El conector Ragdoll garantiza movimientos articulares naturales y humanos.
Deslizante
Un raíl restringe las posibles direcciones de movimiento a un solo eje, el eje Z del conector.
La libertad de movimiento puede restringirse en términos de longitud.
Giro Deslizante
Un raíl giratorio limita las posibles direcciones de movimiento a un solo eje, el eje Z del conector. También se puede girar alrededor del eje del carril.
La libertad de movimiento puede restringirse tanto en longitud como en rotación.
Planar
Una superficie sólo permitirá movimientos en el plano X-Z del conector.
La libertad de movimiento puede restringirse en las 4 direcciones.
Caja
Un cuboide permite todas las direcciones de movimiento, pero puede restringirse en las 6 direcciones.
Suspensión
Este tipo es un poco fuera de lo común. Permite movimientos en la dirección Y del conector y rotación alrededor del eje Z del conector. Nada inusual hasta ahora. Pero hay un muelle adicional (a lo largo del eje Y del conector). Con él se pueden crear de forma muy sencilla y rápida construcciones de ruedas dinámicas, elásticas e incluso dirigibles, para que nada se interponga en el camino de la creación de trenes de rodaje móviles. Puede encontrar una escena de ejemplo en <TEXT_ID TRIGIDBODY-RIGIDBODY_PBD_FRICTION> Fricción</TEXT_ID>.
Ignorar Colisiones
Esta opción sólo se aplica a las colisiones entre los dos objetos conectados por el conector. A menudo, durante la construcción de una escena, cuando estás probando construcciones básicas de conectores, sería perjudicial dejar que las consultas de colisión surtieran efecto.
Selección
Aquí se puede alojar una etiqueta de selección MoGraph con los conectores seleccionados. Sólo los conectores contenidos en la selección se evalúan con respecto a las colisiones entre los Cuerpos Rígidos vinculados.
Radio del Cono[0..89°]
Con el tipo de conectorRagdoll, el movimiento puede restringirse en un espacio cónico. Aquí puede ajustar la abertura de este cono.
Elipse
Radio Cono Y[0..89°]
Activando esta opción, el cono (perfecto) puede deformarse en un cono comprimido. El radio del cono Y regulará entonces la compresión.
Ángulo de Dirección[-∞..+∞°]
Este parámetro y los 4 siguientes sólo se mostrarán cuando se utilice el Tipo deSuspensión de Rueda.
Ángulo de dirección define el ángulo de la rueda alrededor del eje Y del conector. Si animas este parámetro, puedes simular el control real del vehículo.
Reposo de la Suspensión[-∞..+∞m]
Sirve para definir la posición de reposo de la suspensión integrada, partiendo del origen del conector. Los valores negativos empujan el vehículo hacia arriba en consecuencia.
Rigidez de Suspensión[0.00..+∞]
La rigidez de la suspensión define la magnitud de las fuerzas que ejerce la suspensión cuando la longitud cambia con respecto a la fase de reposo. Cuanto más dura es una suspensión, más difícil es comprimirla o extenderla en toda su longitud (y más rápido oscila).
Amortiguación de Suspensión[0..+∞%]
Como sabes por tu coche, no hay suspensión sin amortiguación ("shock absorber"). Esto garantiza que las vibraciones disminuyan rápidamente y que el neumático se mantenga siempre en la carretera. Cuanto mayor sea la amortiguación de la suspensión, más rápido volverá la suspensión al reposo.
Rebote[0..+∞%]
Si ha definido límites de ángulo con Desde o Hasta, puede utilizar este parámetro para establecer cuánto retrocede la suspensión del movimiento cuando el objeto toca el tope.
Límite Bajo X
Desde[-∞..+∞m]
Límite Alto X
A[-∞..+∞m]
Límite Bajo Y
Desde[-∞..+∞m]
Limite Alto Y
A[-∞..+∞m]
Límite Bajo Z
Desde[-∞..+∞m]
Límite Alto Z
A[-∞..+∞m]
Para los tipos de conectores que permiten el movimiento, éste puede restringirse a lo largo de los ejes y partiendo del origen del conector.
Límite Angular
Límite Angular 2
Desde[-∞..+∞°]
A[-∞..+∞°]
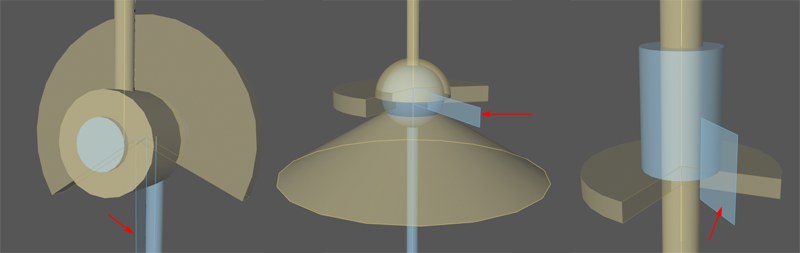
Límites de ángulo para varios conectores. El puntero de tope marcado con la flecha central sólo puede moverse dentro de los límites amarillos.
Para casi todos los tipos de conectores que permiten la rotación, encontrarás restricciones de ángulo que puedes definir utilizando estos parámetros.
Si no se definen límites de ángulo, los objetos pueden girar alrededor del centro de la bisagra un número infinito de veces en caso de movimiento giratorio (infinito en la dirección del carril para los movimientos a lo largo de un carril).
Tenga en cuenta que los Límites de Ángulo sólo se aplican en el rango de UN giro completo, es decir, no habrá restricciones posibles à la "Gira 720° y luego para".
El conector tipo Cardan, que permite 2 planos de rotación, puede restringirse adicionalmente mediante el Límite de Ángulo 2.
Rotura de Fuerza
Fuerza[0..+∞m]
Rotura de Torsión
Torsión[0.00..+∞]
Puede introducirse un valor límite para la fuerza y/o el par en TipoFijo. Si la fuerza y/o el par que actúan sobre el conector superan estos valores límite, el conector cede y se rompe, y entonces se comporta como si ya no existiera o estuviera desconectado.
Ten en cuenta que es posible que tengas que introducir valores muy altos (de cinco a seis cifras), dependiendo de la escena y de las fuerzas que actúen.
Los valores altos hacen que el conector sea más estable, mientras que los valores bajos hacen que se rompa antes.
Selección
Pesos
Selección
Pesos
Pesos
Selección
Pesos
Pesos
Selección
Pesos
Pesos
Selección
Pesos
Selección
Pesos
Selección
Pesos
Selección
Pesos
Selección
Pesos
Selección
Pesos
La pequeña flecha situada a la izquierda de los nombres de numerosos parámetros puede utilizarse para mostrar campos de enlace expandibles denominados Ponderación o Selección. Las etiquetas de selección MoGraph o los mapas de ponderación MoGraph se almacenan aquí - pueden crearse interactivamente con Selección MoGraph o Pincel Pesos MoGraph pintando sobre los conectores. Por supuesto, también pueden establecerse mediante campos.
Esto tiene el siguiente efecto:
Selección: Siempre asignada a una opción. Una etiqueta de selección MoGraph define a qué conectores se aplica la opción mediante su selección de conectores almacenada.
Ponderaciones: siempre se asignarán a un valor de parámetro. Este valor de parámetro define un valor máximo que se asignará a conectores específicos mediante Ponderación. Si, por ejemplo, el valor del parámetro se establece en 200 cm y se define un coeficiente corrector de 0,5 o 50%, el valor 100 cm afectará a este conector.
Nota: Tenga en cuenta que los objetos individuales también se pueden empaquetar en un objeto Fractura, lo que significa que también funcionarán con las dos herramientas mencionadas.
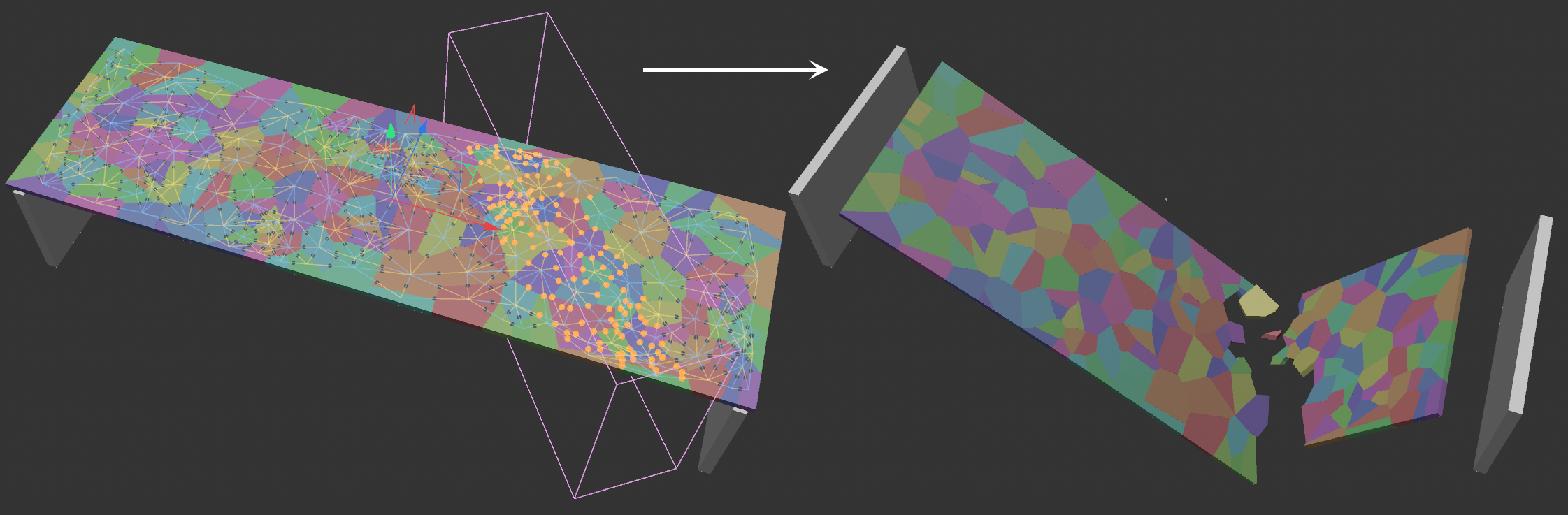
Una etiqueta de selección MoGraph (controlada por un campo cubo) en el campo de selección del parámetro Fuerza de rotura controla el proceso de rotura de un objeto de rotura Voronoi.
Objetos
Esta lista de objetos contiene todos los objetos que están conectados con conectores. ¿Cómo se introducen objetos en la lista?
Cuando se crea el conector, todos los objetos actualmente seleccionados se añaden a la lista.
Puedes arrastrar y soltar objetos en él.
Para que los conectores funcionen correctamente, los objetos enlazados deben ser Cuerpos Rígidos (los cuerpos blandos también funcionan con Bullet Dynamics).
Nota: Actualmente no es posible conectar un conector a otro con el sistema Simulate.
Crear grupo
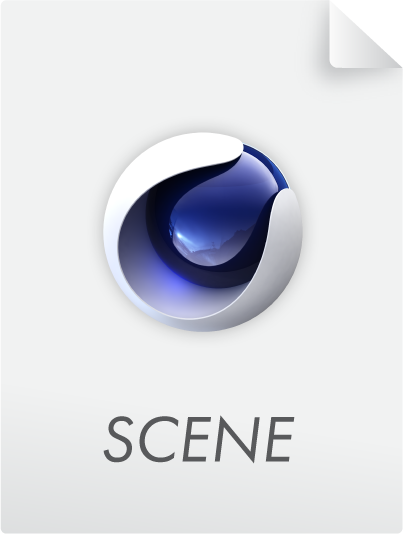
Tienes la opción de utilizar el icono de carpeta para crear grupos con los que combinar elementos. No se crearán conectores dentro de los elementos de un grupo, pero sí para los elementos de otros grupos - o elementos sin grupo.
Los elementos dentro de una carpeta no están vinculados con conectores.
En la ilustración anterior, los tori deben estar conectados a los cubos opuestos. En el modo Distancia, el tori y el cubo también están inicialmente conectados entre sí, ya que están más cerca que sus homólogos. Si pones ambos en su propio grupo, las conexiones sólo se harán con el otro grupo.
Nota: Seleccione un elemento de la lista para encontrar ajustes adicionales que se muestran debajo de la lista. Allí se pueden definir algunos detalles relativos a la aplicación de fuerzas y la fijación de Cuerpos Rígidos.
Crear configuración
Estos ajustes - que no pueden modificarse desde el inicio de la simulación hasta el final de la misma - pueden utilizarse para controlar la generación automática de conectores entre los Cuerpos Rígidos de la lista de objetos.
Si hay un objeto Clonador aquí, por ejemplo, se pueden crear muchos miles de conectores, cada uno de los cuales conectará un par de Cuerpos Rígidos en el medio.
Nota:Si sólo hay 1 ó 2 cuerpos rígidos en la lista de objetos, los ajustes de creación aparecen en gris, ya que no es necesaria la creación automática de conectores (en ese caso, sólo es efectivo 1 conector por objeto conector). Esto sólo ocurre con 3 o más objetos
Modo
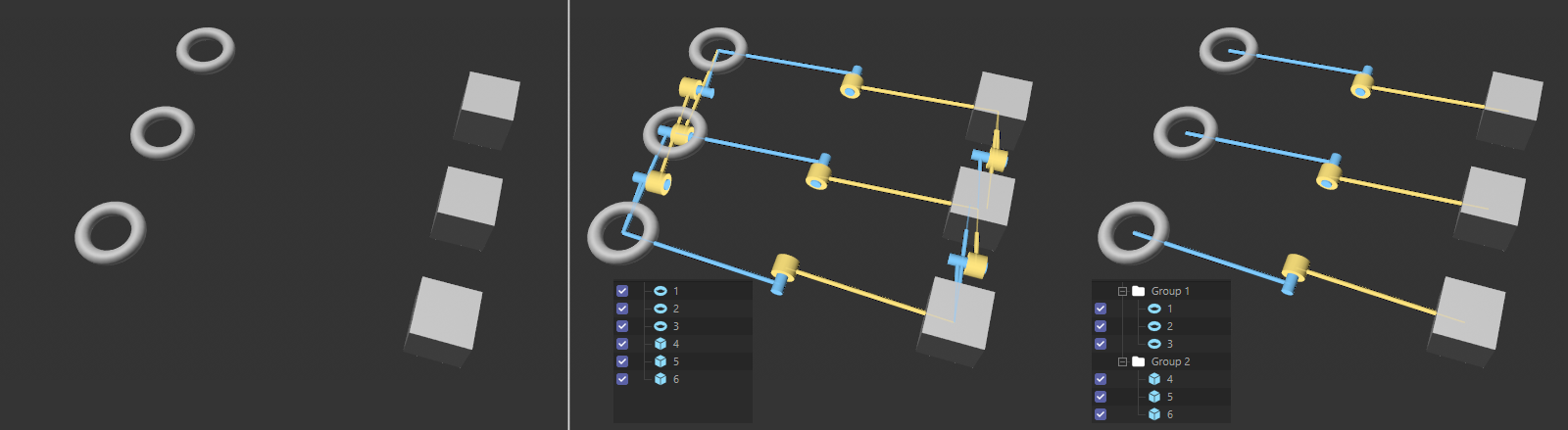
Se utiliza un objeto Clonador para crear un muro de ladrillos. Los azulejos se conectan de la siguiente manera mediante conectores: modo Índice a la izquierda, Distancia a la derecha.
Existen 2 modos básicos con los que se crean los conectores, cada uno de los cuales muestra parámetros diferentes:
Índice
El orden de los Cuerpos Rígidos es decisivo aquí: El Cuerpo Rígido actual siempre está conectado al siguiente. Pero, ¿cuál es el "siguiente"? Muy sencillo: viene determinado por el orden en la lista de objetos. Si hay un objeto Clon aquí: Los clones se numerarán internamente (véase también Mostrar Índices). los conectores se crean y conectan en consecuencia.
Si en la lista de objetos hay objetos que son objetos padre de otros objetos de la Gestión de Objetos, también se tendrán en cuenta sus objetos Hijo.
Nota: Aquí es posible un máximo de 2 conectores por Cuerpo Rígido: Al anterior y al siguiente (por supuesto, no hay razón para no crear más objetos conectores, que a su vez crean conectores).
Como puede ver en la imagen de arriba a la izquierda, no tiene necesariamente sentido que una ficha de la fila inferior esté conectada a una ficha de la fila superior.
Por tanto, el método "más natural" es el siguiente:
Distancia
Este modo conecta los Cuerpos Rígidos en función de su distancia entre sí.
A medida que aumenta el Radio de Búsqueda, los Cuerpos Rígidos espacialmente cercanos se conectarán primero. Suele corresponder más a la realidad que el modo Índice. Imagine un muro de ladrillos: los ladrillos individuales están unidos a sus vecinos directos por mortero; no sólo al anterior/siguiente, sino también al de arriba/abajo. Esto es exactamente para lo que está pensado el modo a distancia: para conectarse localmente, como se muestra arriba a la derecha.
En este modo, también se pueden conectar muchos conectores a un mismo Cuerpo Rígido, a diferencia del modo Índice, que permite un máximo de 2 conectores.
Ciclo
Esta opción, que sólo se muestra en modo índice, conecta el primer y el último Cuerpo Rígido de la lista de objetos - si hay un objeto Clonador allí, el primer y el último clon se conectan.
Radio Búsqueda[-∞..+∞m]
El Radio de Búsqueda define la distancia de Cuerpo Rígido a Cuerpo Rígido entre cuyos orígenes se van a crear conectores.
La distancia se define de malla a malla. Por lo tanto, se aplica lo siguiente: la investigación tiene lugar entre las superficies, entre los orígenes.
Si hay alguna discrepancia aquí - especialmente con objetos muy largos y de baja resolución - intente aumentar la resolución de la malla de los Cuerpos Rígidos implicados.
Ten cuidado con los radios de búsqueda grandes, ya que esto puede llevar rápidamente a un gran número de conectores, lo que ralentiza los cálculos de simulación. La siguiente configuración puede poner fin a esta situación.
Limite Conexiones
Máx[1..2147483647]
Dependiendo del Radio de Búsqueda definido, se pueden crear muchísimos conectores, ya que todos los Cuerpos Rígidos dentro de este radio estarán conectados a todos los demás. Para limitar el número de conectores, activa Limitar conexiones y establece el número de conexiones mediante Máx. conexiones. establecer interactivamente un límite superior. Tenga en cuenta que no se trata de un valor absoluto, sino de un límite superior. El Max. define el número máximo de conectores que se utilizarán. pero puede que haya menos, o incluso ninguna. Esto ocurre, por ejemplo, cuando los objetos vecinos ya han alcanzado su número máximo de conectores.
2025
Ajustes de Colocación
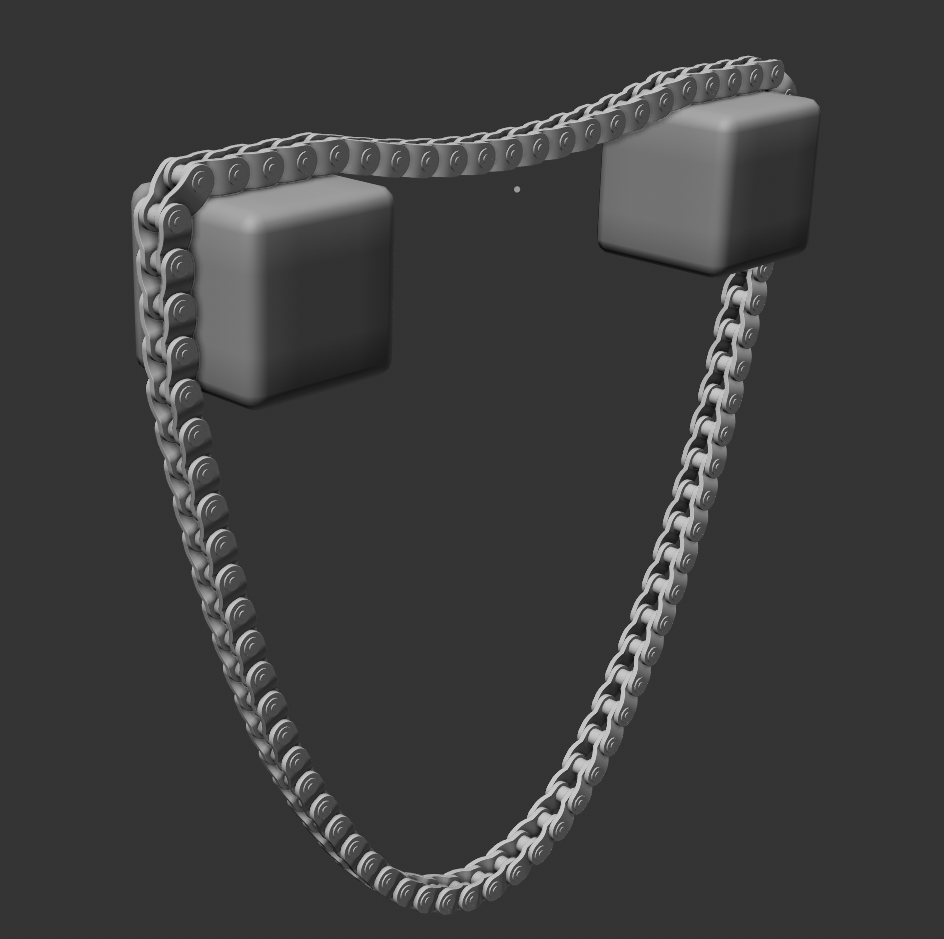
Los conectores entre los eslabones individuales de la cadena crean una cadena.
Los siguientes ajustes se refieren a la colocación y alineación de los conectores generados automáticamente entre los Cuerpos Rígidos individuales. Aunque es fácil colocar y alinear objetos conectores de forma interactiva, no es tan sencillo con los conectores generados automáticamente, ya que éstos se basan en los sistemas de coordenadas individuales de los socios de enlace.
Por lo tanto, aquí encontrará una serie de ajustes que le ayudarán con la colocación/alineación automática.
Referencia de Posición
Compensación[-∞..+∞%]
Los posibles modos de posición de referencia.
Utilice Posición de referencia para definir dónde se colocan los conectores respectivos entre los socios de enlace A y B.
Puede elegir entre las siguientes opciones:
Centro: El conector se coloca en el medio entre A y B. Más precisamente: En una línea recta formada por los orígenes de A y B, donde se define con Offset dónde exactamente en esta línea recta (50% corresponde exactamente al centro).
Espacio local A/B: aquí se utiliza el sistema de coordenadas del socio de enlace A o B. El conector puede posicionarse libremente mediante Offset y sus parámetrosX, Y y Z.
Punto Siguiente: Aquí tratamos de encontrar la distancia más corta entre las superficies de A y B. El conector se coloca en esta línea recta, teniendo en cuenta el Offset(50% centro, 0%/100% superficie A/B).
Nota:Esto funciona con menos precisión con objetos de resolución muy gruesa que con objetos de resolución fina, por lo que puede ayudar a subdividir las parejas de colisión con más fuerza en caso de imprecisiones.
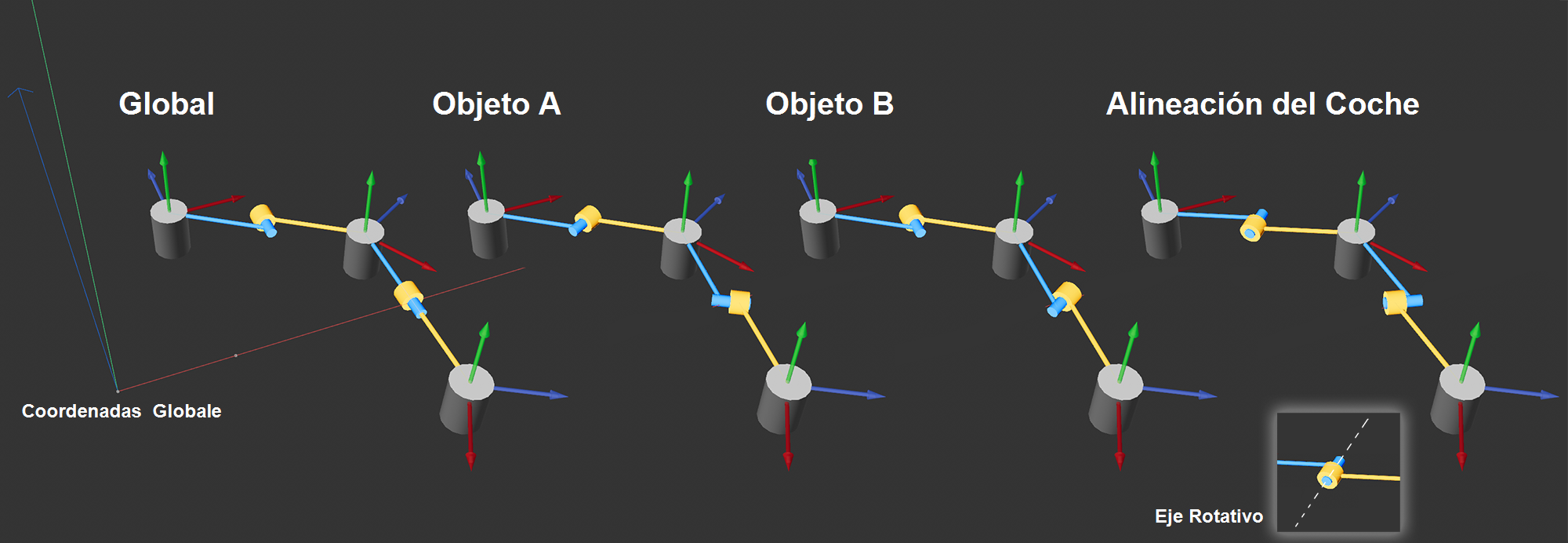
Orientación
Aquí puede ver cómo se alinean los ejes giratorios del conector en los distintos modos.
Con Alineación se define cómo se orientan los conectores entre los enlaces A y B. Esto es especialmente importante para las bisagras, ya que determina el eje de rotación. Para las bisagras, el eje de rotación es siempre el eje Z del conector.
Puedes elegir entre:
Global: Los conectores se orientan con su eje Z hacia el eje Z del mundo.
Objeto A/B: Los conectores giran con sus ejes Z en la dirección de los ejes Z del objeto A o del objeto B.
Autoalineación: Los conectores se alinean de forma que sus ejes Z sean perpendiculares a la conexión de los centros de masa de los dos cuerpos rígidos implicados.
Tenga también en cuenta:
El objeto conector se puede mover y girar, lo que significa que los conectores individuales que contiene también se pueden mover/rotar alrededor de su eje individual.
El objeto conector puede editarse pulsando la tecla C, lo que permite acceder directamente a las propiedades de cada conector.
Auto Crear
Si la opción de creación automática está activada, los conectores se crean "en directo" cuando se modifican los ajustes de creación. Esto puede ser muy difícil con un gran número de conectores. En este caso, desactive la opción y cree y elimine conectores con un clic del ratón utilizando los botones del mismo nombre.
Nota: Actualmente es aconsejable dejar activada la Creación automática si desea cambiar los parámetros del conector (por ejemplo, Ignorar colisiones, Fuerza, etc.) después de la generación. También puede hacer clic en Crear después de cambiar los parámetros.
Crear
Crear siempre desencadena una nueva creación de los conectores, teniendo en cuenta todos los ajustes.
Limpiar
Esto elimina todos los conectores creados automáticamente. Se conservará el objeto conector.
 Los distintos conectores. El modo Fijo no se muestra.
Los distintos conectores. El modo Fijo no se muestra.
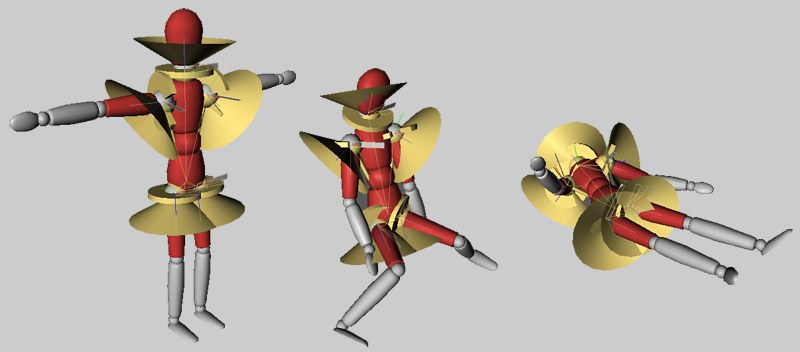 El conector Ragdoll garantiza movimientos articulares naturales y humanos.
El conector Ragdoll garantiza movimientos articulares naturales y humanos.
 Límites de ángulo para varios conectores. El puntero de tope marcado con la flecha central sólo puede moverse dentro de los límites amarillos.
Límites de ángulo para varios conectores. El puntero de tope marcado con la flecha central sólo puede moverse dentro de los límites amarillos.