커넥터 태그
커넥터의 역할은 이름에서 알 수 있듯이 시뮬레이션 시스템 내의 오브젝트를 연결하는 것입니다. 이는 부분적으로 클로스 벨트 및 로프 벨트 태그가 될 수도 있지만, 시뮬레이션된 오브젝트와 시뮬레이션되지 않은 오브젝트를 연결합니다.
반면, 커넥터 태그는 시뮬레이션된 객체를 서로 연결합니다. 예를 들어, 클로스 태그를 착용한 객체를 다른 클로스/로프 태그를 착용한 객체에 연결합니다. 다음 씬에서는 수평 로프가 끝점에 부착되고 나머지 시스템이 반대 방향의 힘에 따라 움직입니다.
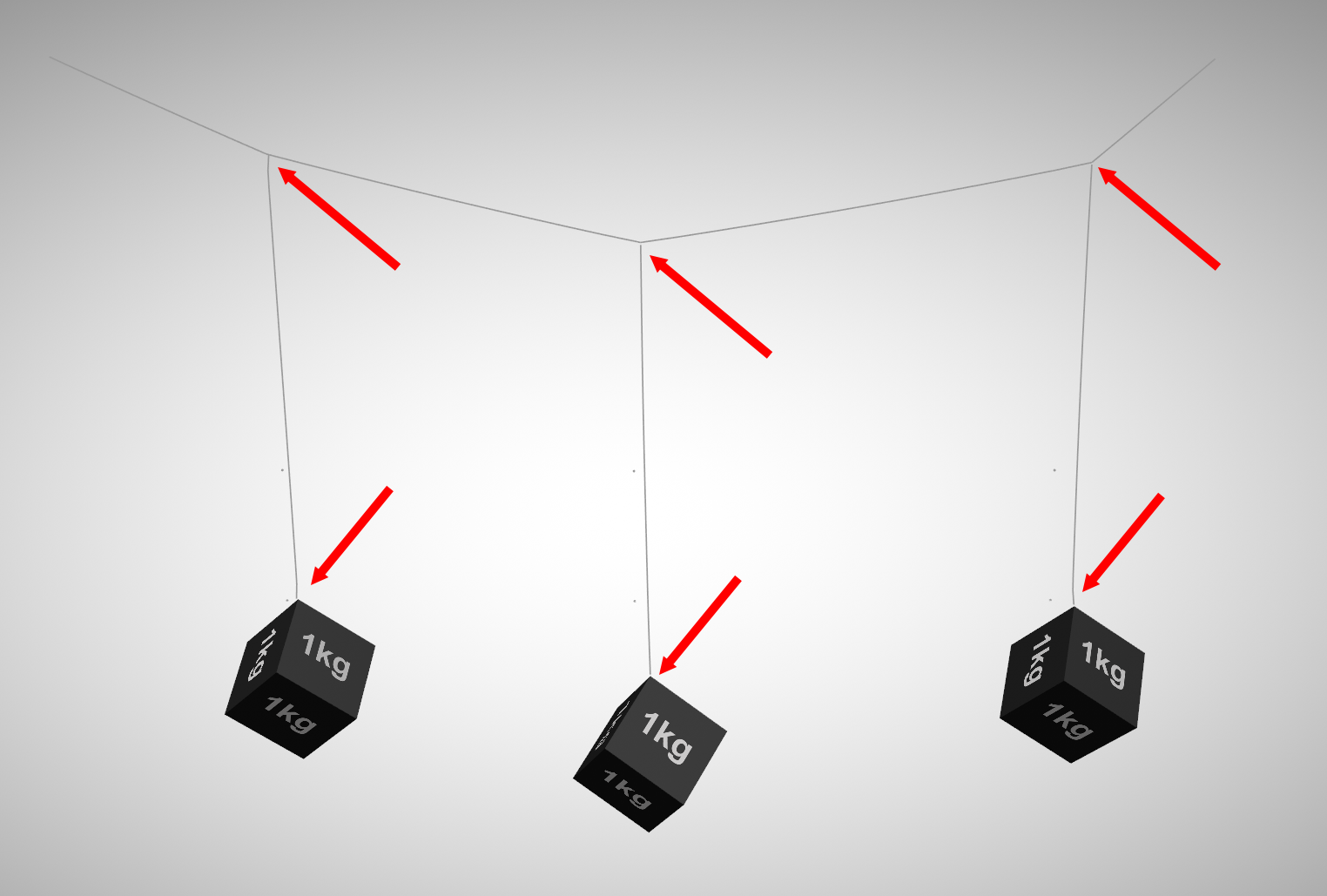
이 씬에는 4개의 스플라인, 즉 가로로 늘어진 로프와 큐브가 매달려 있는 3개의 세로 로프가 있습니다. 3개의 수직 스플라인에는 각각 커넥터 태그가 할당되어 있습니다. 이렇게 하면 표시된 지점에 커넥터 컨스트레인트가 생성되고 수직 스플라인이 수평 로프 및 하나의 큐브와 연결되는지 확인합니다(또는 4개의 스플라인을 모두 하나로 결합할 수 있으며, 이 경우 커넥터 태그에서 동일한 오브젝트 옵션을 활성화해야 스플라인 세그먼트가 연결될 수 있습니다).
커넥터오브젝트에는 다음과 같은 특수 속성이 있습니다:
- 커넥터 제약 조건은 제어 가능한 거리를 기반으로 생성되며, 즉 한 지점에서 다른 지점까지의 거리에 따라 해당 지점에 제약 조건을 생성할지 여부가 정의됩니다.
- 제약 조건은 동일한 오브젝트 내의 지점에 생성할 수도 있습니다. 여기에서 주름에 영향을 주거나 뻣뻣함을 만들 수 있습니다.
- 커넥터 제약 조건은 특정 연신율에서 찢어질 수 있습니다.
- 연결된 포인트 간의 충돌 감지가 비활성화됩니다(가까운 연결의 경우 타겟 길이를 0으로 설정하고 포인트 간 위치 지정을 수행할 수 있음).
작업
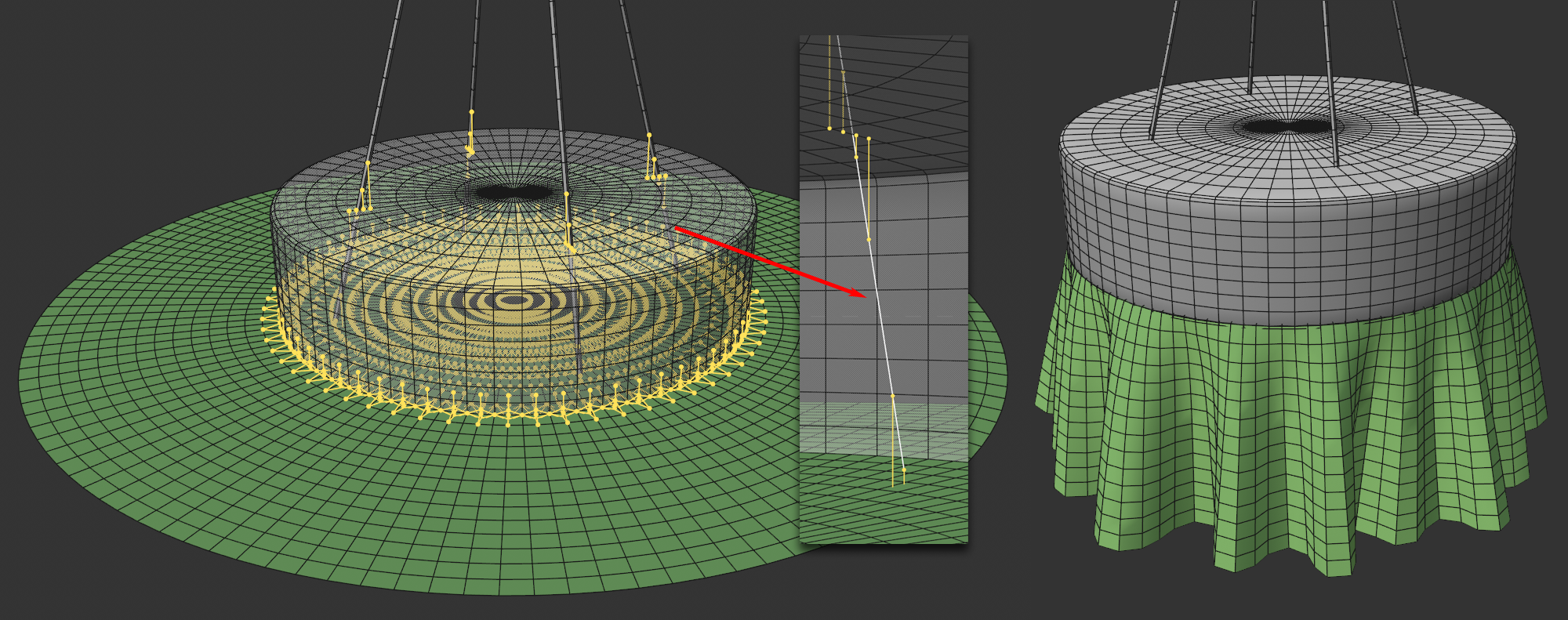
커넥터 태그를 지정한 후에는 먼저 해당 제약 조건을 만들어야 합니다. 이렇게 하려면 태그 탭에서 생성하기 버튼을 클릭합니다. 검색 반경이 충분히 크면 포인트 사이에 제약 조건이 생성되어 뷰포트에 노란색 선으로 표시되며, 기본적으로 태그가 선택되면 항상 표시됩니다.
또한 일부 파라미터는 리지드 바디에서는 기능이 없습니다. 예를 들어, 최대 커넥터(리지드 바디 간), 포인트 제한 또는 같은 오브젝트 등이 있습니다.
그렇지 않으면 커넥터는 여기에 설명된 대로 작동합니다.
팁과 요령
리지드 바디와 로프 또는 의류를 연결할 때 로프 스플라인이나 의류 메쉬가 리지드 바디로 돌출되도록 하여 눈에 보이는 간격을 피할 수 있습니다(이전 버전에서는 이러한 오브젝트가 문제 없이 겹칠 수 없었습니다). 커넥터가 활성화된 경우, 연결된 지점은 충돌과 관련하여 무시됩니다. 이러한 경우 중복은 문제가 되지 않습니다.