다이나믹
태그가 클론 생성 오브젝트 중 하나(예: 클로너 오브젝트, 보로노이 분쇄 오브젝트 등)에 할당된 경우, 모그라프 선택을 사용하여 리지드 바디 할당에서 개별 클론을 제외할 수 있습니다. 하지만 여전히 충돌 오브젝트로 작동합니다.
여기에서 해당 리지드 바디의 시뮬레이션이 시작되는 지점을 정의할 수 있습니다. 그렇지 않으면 시작 위치에 유지됩니다.
시뮬레이션이 작동하기 시작하면 오브젝트를 제어할 수 있습니다. 리지드 바디의 모든 애니메이션이 비활성화됩니다(예외: 위치/회전 따르기 ('포스' 탭)으로 작업 중인 경우).
다음 옵션 중에서 선택할 수 있습니다:
- 즉시: 시뮬레이션이 즉시 시작됩니다.
- 충돌 시: 해당 오브젝트가 정의 가능한 최소 속도 (트리거 속도 임계값)로 다른 시뮬레이션 오브젝트에 닿을 때만 시뮬레이션이 시작됩니다.
- 최대 속도: 이 모드는 애니메이션 리지드 바디에 적용됩니다. 첫 번째 속도 피크에 도달하자마자(선형이든 회전이든) 애니메이션이 중단되고 시뮬레이션이 활성화됩니다. 현재 속도가 시뮬레이션에 통합됩니다. 무단계 전환이 발생합니다.
A에서 B로 이동하는 일반 애니메이션의 경우 기본 이지인 보간을 사용하면 애니메이션이 애니메이션 트랙 중앙에서 자동으로 시작됩니다.
트리거에서 충돌 발생 시를 활성화한 경우, 여기에서 충돌이 발생하기 전에 충돌이 발생해야 하는 최소 속도를 선택할 수 있습니다.
그런 다음 리지드 바디 생성이 파티클 시스템으로 넘겨질 때 이러한 세 가지 설정이 표시되며, 일부 파티클 속성(속도 및 정렬)이 직접 넘겨질 수 있습니다.
다음 예에서, 리지드바 는 궤도를 도는 이미터의 파티클 속도를 상속받습니다.
파티클 속성을 생성 시점에 적용하려면 해당 옵션을 활성화합니다. 더 이상 파티클의 궤적이 강체에 영향을 미치지 않는다는 점에 유의하세요. 파티클/리지드 바디 생성에 있어서는 파티클의 속성만이 결정적입니다.
리지드 바디 태그는 복제 개체에 지정해야 하며, 그러면 파티클 그룹에서 새로 생성된 각 파티클에 대해 오브젝트 모드에서 리지드 바디가 생성됩니다.
시뮬레이션이 시작될 때(트리거 참조) 강체가 자유롭게 정의 가능한 속도를 가져야 하는 경우 이 옵션을 활성화합니다. 예를 들어 리지드 바디가 다른 시뮬레이션 오브젝트에 닿는 즉시 빠른 속도로 튕겨낼 수 있습니다.
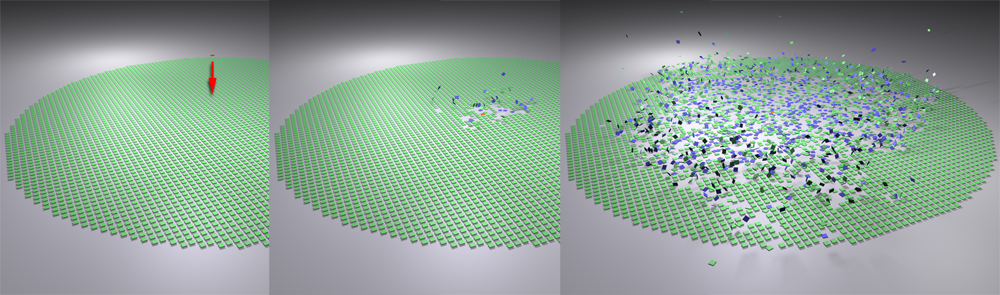
이를 통해 예를 들어 흥미로운 연쇄 반응을 만들 수 있습니다. 이는 잘 알려진 쥐덫 실험과 유사합니다. 다음 씬에서는 각 리지드 바디에 Y 방향(위쪽)의 시작 속도를 적용했습니다. 트리거가 충돌 시로 설정됩니다.
예를 들어 이제 중간에 다른 리지드 바디를 떨어뜨리면 연쇄 반응이 진행됩니다.
방향에서 정의할 수 있는 속도 방향을 리지드 바디의 오브젝트 좌표계(활성화)를 기준으로 해야 하나요, 아니면 월드 좌표계(비활성화)를 기준으로 해야 하나요? 여기에서 이를 정의할 수 있습니다.
시작 속도의 방향은 벡터로 입력할 수 있습니다. 예를 들어 위쪽에서 수행하려면 0, 1, 0을 정의합니다.
여기에 시작 속도를 입력합니다. 이는 초당 센티미터입니다. 속도 방향은 뷰포트에 노란색 선으로 표시됩니다.
방향에서 시작 속도 방향을 벡터를 통해 정의할 수 있습니다. 오브젝트 위치를 사용하는 것이 더 간단한 방법입니다. 아무 오브젝트나 여기로 드래그하면 시작 속도 방향이 오브젝트의 원점에 자동으로 정렬됩니다.
H, P, B 축으로 시뮬레이션을 사용할 때 회전 속도를 여기에 입력합니다. 회전 축은 뷰포트에서 보라색 선으로 표시됩니다.
축에서 정의할 수 있는 회전축을 리지드 바디의 오브젝트 좌표계(활성화)를 기준으로 해야 하나요, 아니면 월드 좌표계(비활성화)를 기준으로 해야 하나요? 여기에서 이를 정의할 수 있습니다.
여기에서 벡터를 회전축으로 정의합니다. X, Y, Z 축에 각각 3개의 필드가 있습니다. Y축을 중심으로 회전하려면 0,1,0을 입력합니다.
여기에 초당 회전 속도(도)를 입력합니다.
사용자 초기 각속도를 정의한 경우 회전축이 보라색으로 표시됩니다. 시뮬레이션이 시작되면 바로 숨겨집니다.
이 미리 보기의 표시는 여기에서 활성화 또는 비활성화할 수 있습니다.
아래에는 리지드 바디를 잠자기 모드로 전환하는 데 사용할 수 있는 다양한 설정이 나와 있습니다. 이는 주로 컴퓨팅 시간을 최적화하는 데 사용됩니다.
리지드 바디는 시간에 정의된 대로 일정 시간 동안 속도가 이 임계값 아래로 떨어지면 바로 비활성화됩니다. 다른 시뮬레이션 오브젝트와 충돌할 때까지 그 상태를 유지합니다. 그러면 리지드 바디는 잠에서 깨어나 일정 시간 동안 다시 임계 속도 아래로 떨어질 때까지 시뮬레이션에 순응합니다.
리지드 바디를 비활성화하려면 두 임계값이 항상 미달되어야 합니다. 예를 들어, 두 임계값 중 하나를 "0"으로 설정하면(따라서 이 임계값을 끄면) 절대로 비활성화되지 않습니다.
예: 경사진 평면에 정육면체를 떨어뜨리면 원칙적으로 미세 슬라이딩이 발생하여 정육면체가 매우 천천히 내리막길로 미끄러질 수 있습니다. 속도 임계값을 사용하면 이 효과를 끌 수 있습니다.
리지드 바디가 '절전 모드'로 전환되면(앞의 세 가지 파라미터 참조), 예를 들어 충돌로 인해 다시 깨어날 수 있습니다. 리지드 바디의 졸음 반응은 여기에서 확인할 수 있습니다. 값이 작으면 즉시 깨어나고, 값이 점점 커지면 리지드 바디가 점점 더 완고해져 결국에는 전혀 깨어나지 않고 움직이지 않게 됩니다.
이 파라미터는 선형 속도 임계값(따라서 단위 퍼센트)에 연결됩니다. 100%에서 잠자고 있는 강체가 깨어나려면 충돌 시 이 속도에 도달해야 합니다.
100%보다 큰 값도 가능합니다.
값이 위에서 설명한 두 임계값 아래로 떨어지면 일정 시간이 지나면 리지드 바디를 절전 모드로 전환할 수 있습니다. 이 시간은 여기에서 초 단위로 정의할 수 있습니다. 이 작업을 최대한 빨리 수행하려면 여기에 0(=즉시)까지의 작은 값을 정의하세요.
마찰
프로젝트 설정(감쇠)에서 이미 마찰 설정을 찾을 수 있지만 전체 씬에 적용됩니다.
태그 또는 오브젝트 수준에서 마찰을 설정하려면 이 옵션을 활성화합니다. 그렇지 않으면 전역 감쇠가 적용됩니다(이전 단락 참조).
마찰은 선형 운동 (리니어) 및 회전 운동 (앵귤러)과 관련하여 시뮬레이션에서 운동 에너지를 인위적으로 제거하는 것에 지나지 않습니다.
값이 점점 커지면 리지드 바디는 점점 더 점성이 커지는 매질(예: 공기 -> 물 -> 꿀 등)에서 움직이는 것처럼 점점 더 동작합니다.
100%보다 큰 값도 가능합니다.
일반적으로 마찰은 폭발하는 경향이 있는 지나치게 민첩하고 불규칙한 시뮬레이션의 속도를 늦추고 제어 가능한 상태로 유지하는 데 사용됩니다. 제대로 쉬지 않거나 느리게 쉬는 시뮬레이션을 더 빨리 최종 휴식 상태로 전환할 수도 있습니다.
매우 큰 마찰 값을 적용하면 시뮬레이션을 거의 즉시 중지할 수도 있습니다. 하지만 주의: 중력처럼 계속 작용하는 힘은 리지드 바디를 느리게 움직이게 합니다.
일반적으로 애니메이션 프레임 0은 시뮬레이션이 시작되는 씬 상태를 정의합니다. 시뮬레이션의 고급 상태를 향후 시작 상태로 사용하려는 경우가 종종 있습니다. 큐브 더미를 바닥에 펼쳐놓고 싶다고 상상해 보세요. 먼저 시뮬레이션을 시작한 다음 주사위를 바닥에 떨어뜨린 다음 설정을 클릭합니다. 이렇게 하면 바닥에 있는 큐브가 시작 상태로 정의됩니다.
제거를 클릭하면 리지드 바디가 이 위치로 리셋되므로 원래 시작 위치는 내부에 계속 저장됩니다.
기록을 클릭하면 리지드 바디의 현재 속도도 시작 상태로 저장할지 여부가 이 옵션에 결정됩니다. 그렇지 않으면 시뮬레이션이 속도 0 또는 위에 정의된 시작 속도로 시작됩니다.