Hinweis:Sie finden in diesem Tab einige wenige Einstellungen, die noch nicht für das Simulationssystem, sondern nur für die alten Bullet-Dynamics funktionieren. Das ist z.B. Bindung. Ignorieren Sie diese bitte bei Verwendung des Simulationssystems.
Typ
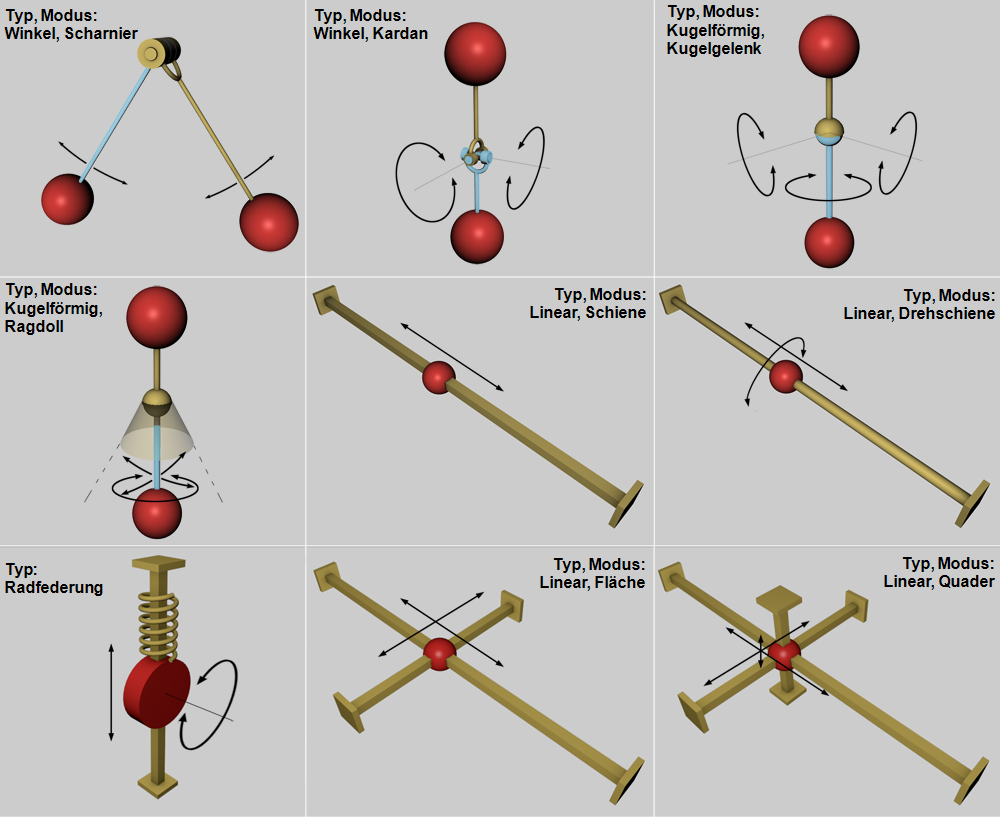
Die verschiedenen Konnektoren. Nicht abgebildet ist der Modus "Fest".
Sie können mit Typ grundsätzlich 5 Typen von Konnektoren einstellen (entsprechend den 5 Befehlen unter Simulieren | Konnektoren des Hauptmenüs), die dann mit Modus genauer spezifiziert werden können. Diese Modi gibt es:
Modus
Fixiert
Hiermit werden überhaupt keine relativen Bewegungen zwischen den Objekten zugelassen. Damit können Objekte - bestehend aus Einzelteilen - verbunden werden.
Scharnier
Ein Scharnier lässt ausschließlich eine Drehbewegung um den Scharniermittelpunkt zu. Die Drehbewegung findet ausschließlich in der Ebene statt, die durch die X- und Y-Achse des Konnektors aufgespannt wird.
Der Bewegungswinkel kann eingeschränkt werden.
Kardan
Ein Kardangelenk besteht im Prinzip aus 2 Scharnieren, die an einem Kreuz um 90° versetzt befestigt sind. Dadurch ergeben sich relativ komplizierte Bewegungen.
Der klassische Anwendungsfall eines Kardangelenks ist die Drehmomentübertragung um die Ecke. Damit das funktioniert, müssen 2 Voraussetzungen gegeben sein:
die Drehachsen der beiden verbunden Objekte müssen sich schneiden
der Konnektor muss exakt auf dem Schnittpunkt der beiden Drehachsen liegen
Das Kardangelenk kann in beiden Drehachsen winkelbeschränkt werden.
Kugelgelenk
Ein Kugelgelenk lässt Drehung in allen 3 Dimensionen zu. Ein Schultergelenk im menschlichen Körper ist z.B. ein Kugelgelenk.
Ragdoll
Ein Ragdoll- Konnektor ist ein Kugelgelenk (s.o.) mit kegelförmiger, einstellbarer Winkelbeschränkung. Zusätzlich kann eine Winkelbeschränkung der Hochachsendrehung definiert werden.
Der Begriff "Ragdoll" ("Stoffpuppe") spiegelt den Verwendungszweck des Konnektors wider: er lässt sich z.B. für einige menschliche Gelenke wie Hüft- oder Schultergelenk einsetzen:
Der Ragdoll- Konnektor sorgt für natürliche, menschliche Gelenkbewegungen.
Schiene
Eine Schiene beschränkt mögliche Bewegungsrichtungen auf lediglich eine Achse, nämlich die Konnektor-Z-Achse.
Die Bewegungsfreiheit kann längenmäßig beschränkt werden.
Drehschiene
Eine Drehschiene beschränkt mögliche Bewegungsrichtungen auf lediglich eine Achse, nämlich die Konnektor-Z-Achse. Zusätzlich kann um die Schienenachse rotiert werden.
Die Bewegungsfreiheit kann sowohl längenmäßig, als auch in der Rotation beschränkt werden.
Fläche
Eine Fläche lässt nur Bewegungen in der X-Z-Ebene des Konnektors zu.
Die Bewegungsfreiheit lässt sich in alle 4 Richtungen einschränken.
Quader
Ein Quader lässt alle Bewegungsrichtungen zu, kann aber in alle 6 Richtungen beschränkt werden.
Radfederung
Dieser Typ fällt etwas aus dem Rahmen. Er lässt Bewegungen in Konnektor-Y-Richtung, sowie Rotation um die Konnektor-Z-Achse zu. Soweit nichts Ungewöhnliches. Aber es wirkt zusätzlich eine Feder (entlang der Konnektor-Y-Achse). Sie können damit sehr einfach und schnell dynamische, federnde und sogar lenkbare Radkonstruktionen erstellen, womit der Erstellung von fahrbaren Untersätzen nichts mehr im Weg steht
Kollision ignorieren
Diese Option gilt nur für Kollisionen zwischen den beiden vom Konnektor verbundenen Objekte. Oft während des Aufbaus einer Szene, wenn Sie prinzipielle Konnektor-Konstruktionen ausprobieren, wäre es störend, Kollisionsabfragen wirken zu lassen.
Selektion
Hier kann ein MoGraph-Selektions-Tag mit selektierten Konnektoren untergebracht werden. Nur in der Selektion enthaltene Konnektoren werden bzgl. Kollision der verknüpften Rigid Bodies miteinander ausgewertet.
Kegelradius[0..89°]
Beim KonnektortypRagdoll kann die Bewegung in einem kegelförmigen Raum beschränkt werden. Diesen Kegel können Sie hier in seiner Öffnung einstellen.
Ellipse
Kegelradius Y[0..89°]
Mit Aktivierung dieser Option kann der (perfekte) Kegel zu einem zusammengedrückten Kegel verformt werdern. Kegeleradius Y reguliert dann das Zusammendrücken.
Steuerwinkel[-∞..+∞°]
Dieser und die nächsten 4 Parameter werden nur bei der Verwendung des TypsRadfederung eingeblendet.
Steuerwinkel definiert den Radeinschlag um die Y-Achse des Konnektors. Sie können hiermit also – wenn Sie diesen Parameter animieren – eine echte Fahrzeugsteuerung nachbilden.
Federruheposition[-∞..+∞m]
Hiermit geben Sie – ausgehend vom Konnektorursprung – die Ruheposition der integrierten Feder an. Negative Werte stemmen das Gefährt dementsprechend nach oben.
Federhärte[0.00..+∞]
Die Federhärte definiert, wie gross die Kräfte sind, die die Feder bei Längenänderung aus der Ruhephase ausübt. Je härter eine Feder ist, desto schwerer lässt Sie sich in der Länge zusammendrücken bzw. auseinander ziehen (und desto schneller schwingt sie).
Federdämpfung[0..+∞%]
Wie Sie es auch vom Auto her kennen, gibt es keine Feder ohne Dämpfung ("Stoßdämpfer"). Dieser sorgt dafür, dass Schwingungen schnell abklingen und der Reifen immer auf der Straße bleibt. Je größer die Federdämpfung, desto schneller kommt die Feder wieder zur Ruhe.
Federn[0..+∞%]
Sollten Sie mit Von bzw. Bis Winkelgrenzen definiert haben, so können Sie mit diesem Parameter einstellen, wie stark die Bewegung zurückfedert, wenn das Objekt auf den Anschlag trifft.
Unteres Limit X
Von[-∞..+∞m]
Oberes Limit X
Bis[-∞..+∞m]
Unteres Limit Y
Von[-∞..+∞m]
Oberes Limit Y
Bis[-∞..+∞m]
Unteres Limit Z
Von[-∞..+∞m]
Oberes Limit Z
Bis[-∞..+∞m]
Bei Konnektortypen, die eine Verschiebung zulassen, kann diese jeweils entlang der Achsen und ausgehend vom Konnektorursprung beschränkt werden.
Winkellimit
Winkellimit 2
Von[-∞..+∞°]
Bis[-∞..+∞°]
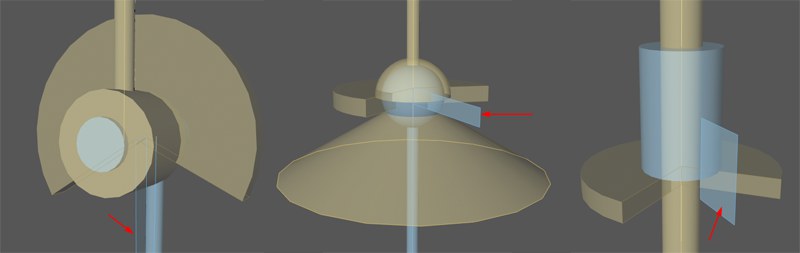
Winkellimits bei verschiedenen Konnektoren. Der jeweils mit dem mittleren Pfeil markierte Anschlagszeiger kann sich nur innerhalb der gelben Limits bewegen.
Bei fast allen Konnektortypen, die eine Drehung zulassen, finden Sie Winkelbeschränkungen, die Sie mit diesen Parametern einstellen können.
Sind keine Winkellimits definiert, so können sich die Objekte im Falle einer Drehbewegung unendlich oft um das Scharnierzentrum drehen (bei Bewegungen entlang einer Schiene unendlich in Schienenrichtung).
Beachten Sie, dass die Winkellimits nur in dem Bereich EINER Volldrehung wirken, d.h. es sind keine Beschränkungen à la "Drehe Dich um 720° und stoppe dann." möglich.
Der Konnektortyp Kardan, der 2 Drehebenen zulässt, kann mittels Winkellimit 2 zusätzlich beschränkt werden.
Brechende Kraft
Kraft[0..+∞m]
Brechendes Drehmoment
Drehmoment[0.00..+∞]
Beim TypFest können ein Grenzwert für die Kraft und/oder das Drehmoment eingegeben werden. Überschreitet die auf den Konnektor wirkende Kraft und/oder das Drehmoment diese Grenzwerte, gibt der Konnektor nach und bricht und verhält sich dann, als wäre er gar nicht mehr da bzw. ausgeschaltet.
Beachten Sie, dass Sie für die Werte mitunter je nach Szene und wirkenden Kräften hier sehr hohe Werte (fünf- bis sechsstellige sind da durchaus drin) eingeben müssen.
Hohe Werte machen den Konnektor stabiler, während kleinere Werte ihn früher brechen lassen.
Selektion
Wichtungen
Selektion
Wichtungen
Wichtungen
Selektion
Wichtungen
Wichtungen
Selektion
Wichtungen
Wichtungen
Selektion
Wichtungen
Selektion
Wichtungen
Selektion
Wichtungen
Selektion
Wichtungen
Selektion
Wichtungen
Selektion
Wichtungen
Mit dem kleinen Pfeil links neben zahlreichen Parameternamen können aufklappbare Verknüpfungsfelder namens Wichtungen bzw. Selektion sichtbar gemacht werden. Hier werden MoGraph-Selektions-Tags bzw. MoGraph-Wichtungs-Maps untergebracht - diese können interaktiv mit dem MoGraph-Selektion bzw. MoGraph-Wichtungspinsel durch Anmalen der Konnektoren erzeugt werden.
Das wirkt sich folgendermaßen aus:
Selektion: ist immer einer Option zugeordnet. Ein MoGraph-Selektions-Tag definiert hier durch seine gespeicherte Konnektorselektion für welche Konnektoren die Option gilt.
Wichtungen: sind immer einem Parameterwert zugeordnet. Dieser Parameterwert gibt einen Maximalwert vor, der durch Wichtungen Konnektorspezifisch zugeordnet wird. Steht der Parameterwert beispielsweise auf 200 cm und es ist eine Wichtung von 0.5 bzw. 50% definiert, wirkt an diesem Konnektor der Wert 100 cm.
Hinweis:
Beachten Sie, dass auch einzelne Objekte in ein Bruch-Objekt gepackt werden können, womit diese ebenfalls mit den beiden erwähnten Werkzeugen funktionieren.
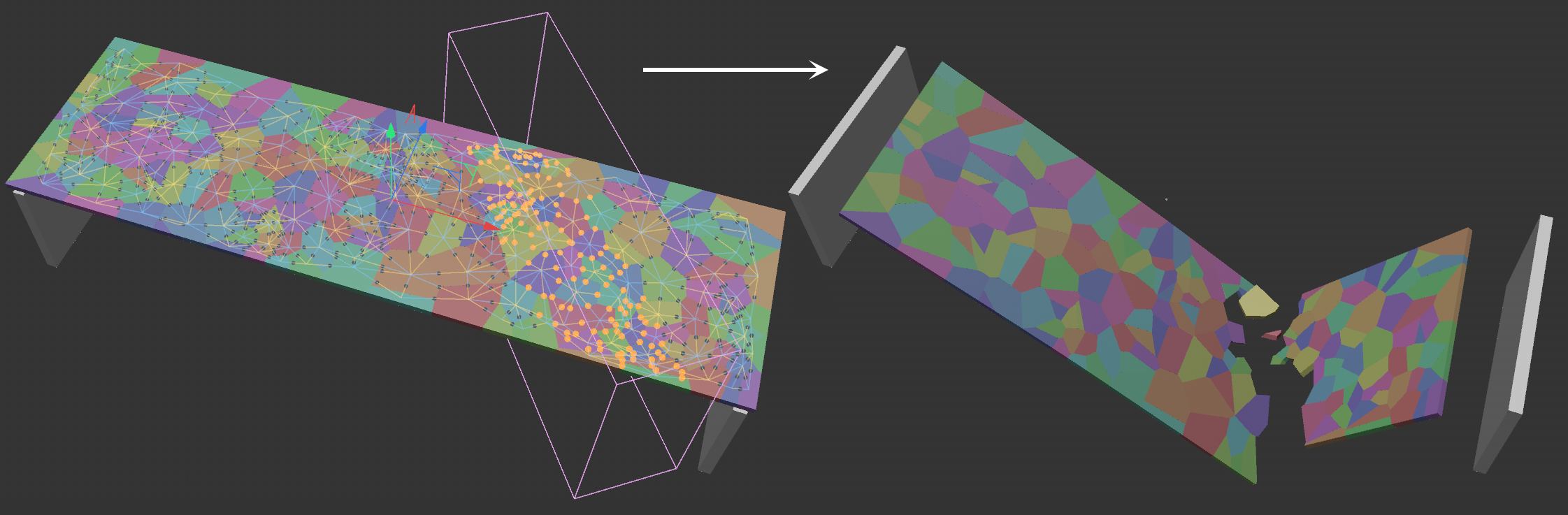
Ein MoGraph-Selektions-Tag (gesteuert durch ein Würfel-Feld) im Selektion-Feld des Parameters Brechende Kraft steuert den Bruchverlauf eines Voronoi-Bruch-Objekts.
Objekte
In dieser Objektliste befinden sich alle Objekte, die mit Konnektoren verbunden werden. Wie bekommen Sie Objekte in die Liste?
Bei Erzeugung des Konnektors werden alle aktuell selektierten Objekte in die Liste aufgenommen.
Sie können Objekte per Drag&Drop hineinziehen.
Damit die Konnektoren korrekt funktionieren, müssen die verknüpften Objekte Rigid Bodies sein (bei Bullet Dynamics funktionieren auch Soft Bodies).
Die Reihenfolge in der Liste hat Auswirkungen auf den ModusIndex.
Hinweis:
Mit dem Simulationssystem ist es derzeit nicht möglich, einen Konnektor mit einem anderen zu verbinden.
Gruppe erzeugen
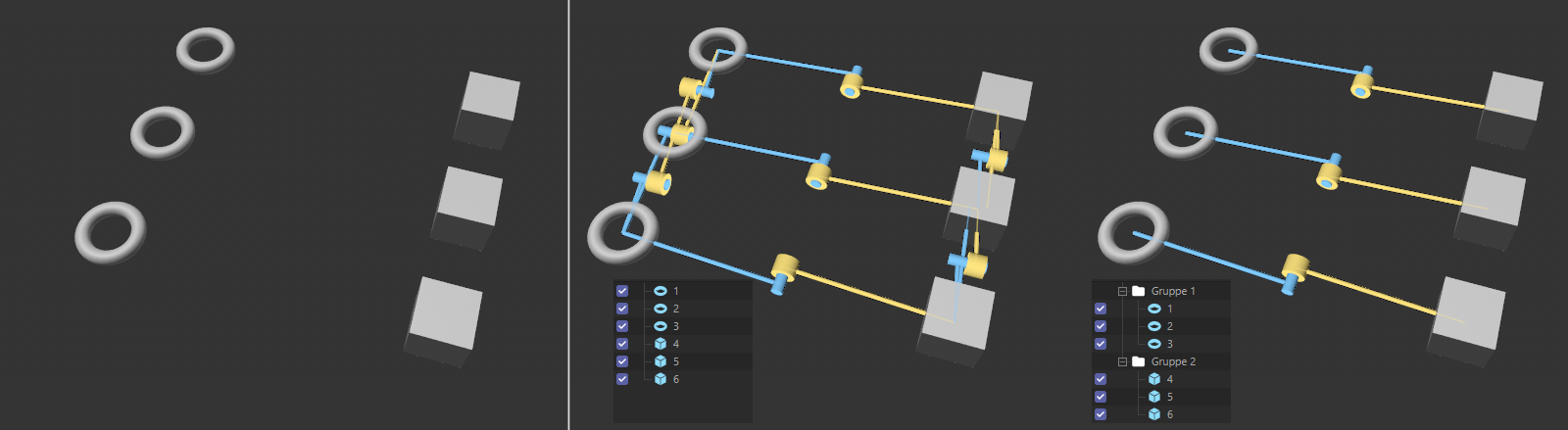
Sie haben die Möglichkeit, mit dem Ordner-Icon Gruppen zu erzeugen, mit denen Sie Elemente zusammenfassen können. Innerhalb der Elemente einer Gruppe werden keine Konnektoren erzeugt, wohl aber zu den Elementen anderer Gruppen - oder Elementen ohne Gruppe.
Elemente innerhalb eines Ordners werden nicht mit Konnektoren verbunden.
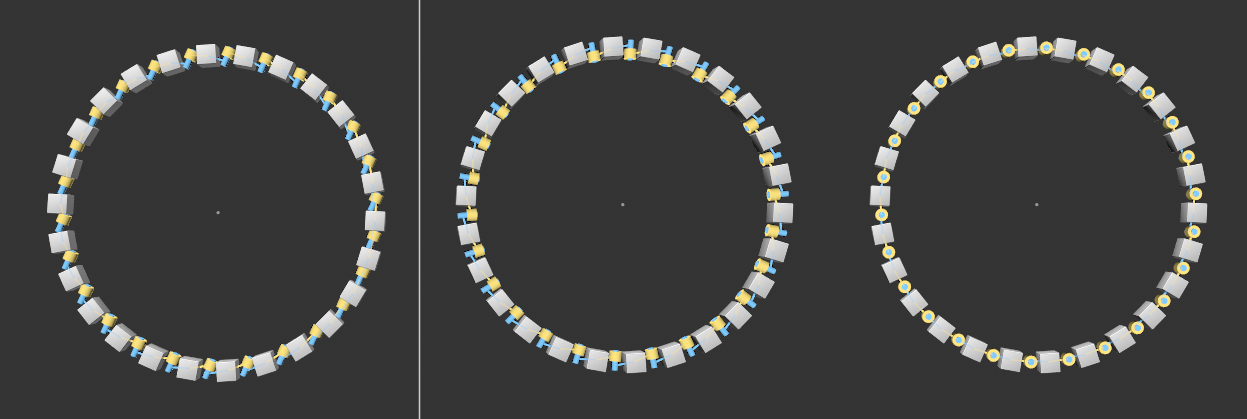
In obiger Abbildung sollen die Tori jeweils mit den Würfeln gegenüber verbunden werden. Im Abstandsmodus werden Tori und Würfel zunächst untereinander ebenfalls verbunden, da diese enger zusammen liegen als ihr Gegenüber. Packen Sie beide jeweils in ihre eigene Gruppe, werden nur Verbindungen zur anderen Gruppe geknüpft.
Hinweis: Selektieren Sie ein Element der Liste, um weitere, unter der Liste eingeblendete Einstellungen zu finden. Dort können einige Details bzgl. Krafteinleitung und Fixierung von Rigid Bodies eingestellt werden.
Erzeugungseinstellungen
Mittels dieser Einstellungen - die nach Simulationsstart bis zum Simulationsende nicht mehr geändert werden können - kann die automatische Konnektorerzeugung zwischen denen in der Objektliste befindlichen Rigid Bodies gesteuert werden.
Befindet sich hier z.B. ein Klon-Objekt, werden evtl. viele tausend Konnektoren, die jeweils mittig ein Rigid-Body-Paar verbinden, erzeugt.
Hinweis:Befinden sich in der Objektliste nur 1 oder 2 Rigid Bodies, sind die Erzeugungseinstellungen ausgegraut, da keine automatische Konnektorerzeugung nötig ist (es wirkt dann genau 1 Konnektor pro Konnektor-Objekt). Das passiert erst ab 3 Objekten
Modus
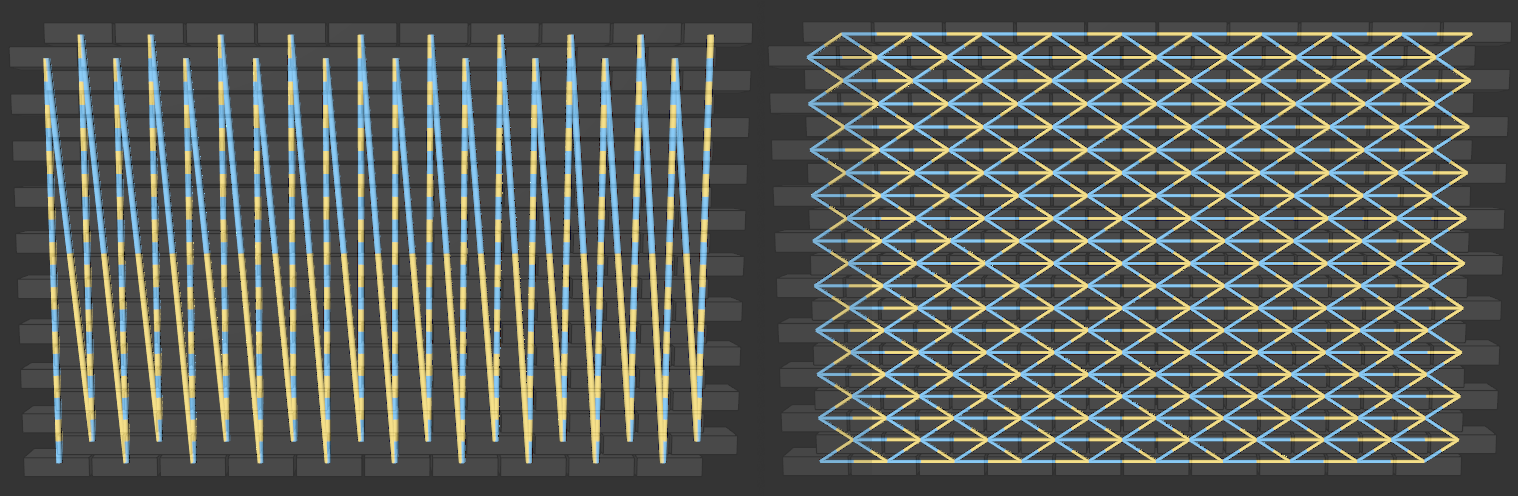
Ein Klon-Objekt bildet eine Ziegelmauer. Die Ziegel sind folgendermaßen mittels Konnektoren verbunden: links Modus "Index", rechts "Distanz".
Es gibt 2 grundlegende Modi, mit denen Konnektoren erzeugt werden - die jeweils verschiedene Parameter einblenden:
Index
Hier ist die Reihenfolge der Rigid Bodies entscheidend: es wird immer der aktuelle Rigid Body mit dem nächsten verbunden. Aber wer ist der “nächste”? Ganz einfach: das entscheidet die Reihenfolge in der Objektliste. Befindet sich hier ein Klon-Objekt: die Klone sind intern durchnummeriert (s.a. Indexnummern anzeigen). Die Konnektoren werden dann entsprechend erzeugt und verbunden.
Befinden sich Objekte in der Objektliste, die im Objekt-Manager Überobjekte anderer Objekte sind, werden deren Unterobjekte ebenfalls berücksichtigt.
Hinweis:
Es sind hier maximal 2 Konnektoren pro Rigid Body möglich: zum vorherigen und zum nächsten (es spricht natürlich nichts dagegen, weitere Konnektor-Objekte zu erzeugen, die ihrerseits Konnektoren anlegen).
Wie Sie oben in der Abbildung linker Hand erkennen können, ist es nicht unbedingt sinnvoll, wenn ein Ziegel der unteren Reihe mit einem der oberen Reihe verbunden ist.
Die “natürlichere” Methode ist daher die nächste:
Distanz
Dieser Modus verbindet Rigid Bodies anhand deren Distanz zueinander.
Es werden mit steigendem Suchradius also zunächst Rigid Bodies verbunden, die räumlich nahe beieinander liegen. Das entspricht gegenüber dem Index-Modus meist mehr der Realität. Stellen Sie sich eine Ziegelmauer vor: die einzelnen Ziegel sind per Mörtel ja mit ihren direkten Nachbarn verbunden: nicht nur mit dem jeweils vorherigen/nächsten, sondern auch mit dem darüber/darunter liegenden. Genau dafür ist der Abstandmodus gedacht: lokal zu verbinden - wie oben rechter Hand in der Abbildung.
In diesem Modus können auch viele Konnektoren mit ein und demselben Rigid Body verbunden sein - anders als beim Index-Modus, der maximal 2 Konnektoren zulässt.
Loop
Diese nur im Index-Modus eingeblendete Option verbindet das erste und letzte Rigid Body in der Objektliste - ist dort ein Klon-Objekt, wird der ersten und letzte Klon verbunden.
Suchradius[-∞..+∞m]
Der Suchradius definiert den Abstand von Rigid Body zu Rigid Body, zwischen deren Ursprüngen Konnektoren erzeugt werden sollen.
Der Abstand ist definiert von Mesh zu Mesh! Es gilt also: ermittelt wird zwischen den Oberflächen, angelegt zwischen den Ursprüngen!
Sollten sich hier Unstimmigkeiten ergeben - besonders bei sehr langen, niedrig aufgelösten Objekten - versuchen Sie das Mesh der beteiligten Rigid Bodies höher aufzulösen.
Seien Sie mit großen Suchradien vorsichtig, da es schnell zu einer Unmenge an Konnektoren kommen kann, was die Simulationsberechnungen verlangsamt. Mit der folgender Einstellung kann hier Einhalt geboten werden.
Verbindungen begrenzen
Max.[1..2147483647]
In Abhängigkeit von Suchradius können viele, viele Konnektoren erzeugt werden, da innerhalb dieses Radius einfach alle Rigid Bodies mit allen anderen verbunden werden. Um die Konnektoranzahl zu begrenzen, aktivieren Sie Verbindungen begrenzen und stellen mittels Max. interaktiv eine Obergrenze ein. Beachten Sie, dass es sich hier nicht um einen absoluten Wert handelt, sondern um eine Obergrenze. Es werden nicht mehr Konnektoren als bei Max. definiert erzeugt, wohl aber können es weniger - oder auch keine - sein. Das passiert z.B. wenn benachbarte Objekte bereits ihre maximale Konnektoranzahl erreicht haben.
Anordnen
Links deaktivierte Option Anordnen, Mitte aktivierte Option Anordnen, rechts dann gedrehtes Konnektor-Objekt.
Die Ausrichtung von Konnektoren ist in vielen Fällen (Ausnahme TypFest) wichtig. Stellen Sie sich ein Scharnier vor: es gibt mit seiner Ausrichtung im Raum vor, in welche Richtung z.B. eine Tür aufschwingt.
Insbesondere der Scharnier-Modus profitiert also von dieser Option. Und das macht sie genau: die Konnektoren richten sich so aus, dass ihre Z-Achsen senkrecht zur Verbindung der Massenschwerpunkte der beiden beteiligten Rigid Bodies stehen.
Beachten Sie auch:
Das Konnektor-Objekt kann verschoben und gedreht werden, womit sich auch die einzelnen enthaltenen Konnektoren um ihre individuelle Achse verschieben/drehen.
Das Konnektor-Objekt kann mit Druck auf die Taste C bearbeitbar gemacht werden, womit sie direkten Zugriff auf die Eigenschaften jedes einzelnen Konnektor haben.
Automatisch erzeugen
Ist die Option Automatisch erzeugen aktiviert, werden Konnektoren bei Änderung der Erzeugungseinstellungen “live” erzeugt. Das kann bei sehr vielen Konnektoren sehr zäh werden. In diesem Fall deaktivieren Sie die Option und erzeugen und löschen Konnektoren per Mausklick mit den gleichnamigen Buttons.
Hinweis: Derzeit ist es angeraten, Automatisch erzeugen aktiviert zu lassen, wenn Sie Konnektorparameter (z.B. Kollision ignorieren, Kraft etc.) nach Erzeugung ändern wollen. Alternativ können Sie nach Parameteränderungen auch auf Erzeugen klicken.
Erzeugen
Erzeugen löst immer eine Neuerzeugung der Konnektoren unter Berücksichtigung aller Einstellungen aus.
Löschen
Hiermit löschen Sie alle automatisch erzeugten Konnektoren. Das Konnektor-Objekt bleibt erhalten.
 Die verschiedenen Konnektoren. Nicht abgebildet ist der Modus "Fest".
Die verschiedenen Konnektoren. Nicht abgebildet ist der Modus "Fest".
 Der Ragdoll- Konnektor sorgt für natürliche, menschliche Gelenkbewegungen.
Der Ragdoll- Konnektor sorgt für natürliche, menschliche Gelenkbewegungen.
 Winkellimits bei verschiedenen Konnektoren. Der jeweils mit dem mittleren Pfeil markierte Anschlagszeiger kann sich nur innerhalb der gelben Limits bewegen.
Winkellimits bei verschiedenen Konnektoren. Der jeweils mit dem mittleren Pfeil markierte Anschlagszeiger kann sich nur innerhalb der gelben Limits bewegen.