Object Properties
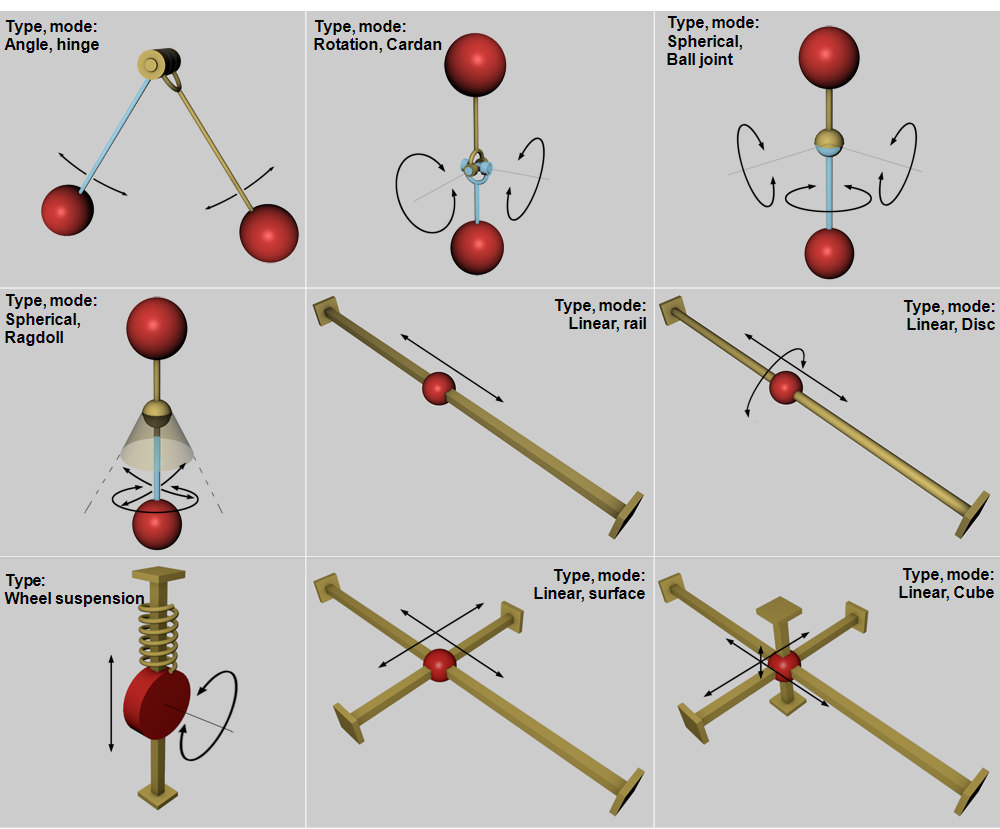 The various connectors. The Fixed mode is not shown.
The various connectors. The Fixed mode is not shown.
You can basically define 5 types of connectors with Type (corresponding to the 5 commands under in the main menu), which can then be defined in more detail with Mode. These modes are available:
This does not allow any relative movements between the objects. This allows objects - consisting of individual parts - to be connected.
A hinge only allows a rotary movement around the hinge center point. The rotary movement takes place exclusively in the plane spanned by the X and Y axes of the connector.
The angle of movement can be restricted.
In principle, a universal joint consists of 2 hinges that are attached to a cross offset by 90°. This results in relatively complicated movements.
The typical application of a universal joint is torque transmission around corners. For this to work, 2 prerequisites must be met:
- The axes of rotation of the two connected objects must intersect
- The connector must lie exactly at the intersection of the two axes of rotation
The universal joint can be angle-limited in both axes of rotation.
A ball joint allows rotation in all 3 dimensions. A shoulder joint in the human body, for example, is a ball and socket joint.
A Ragdoll connector is a ball joint (see above) with a conical, adjustable angle restriction. In addition, an angular restriction of the high axis rotation can be defined.
The term "ragdoll" reflects the intended use of the connector: For example, it can be used for some human joints such as the hip or shoulder joint:
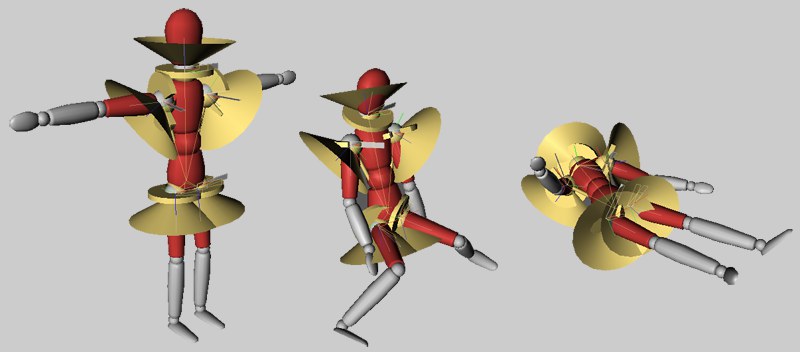 The Ragdoll connector ensures natural, human joint movements.
The Ragdoll connector ensures natural, human joint movements.
A rail restricts possible directions of movement to just one axis, namely the connector Z-axis.
The freedom of movement can be restricted in terms of length.
A rotating rail limits possible directions of movement to just one axis, namely the connector Z-axis. It can also be rotated around the rail axis.
The freedom of movement can be restricted both in terms of length and rotation.
A surface will only allow movements in the X-Z plane of the connector.
Freedom of movement can be restricted in all 4 directions.
A cuboid allows all directions of movement, but can be restricted in all 6 directions.
This type is a bit out of the ordinary. It allows movements in the connector Y direction and rotation around the connector Z axis. Nothing unusual so far. But there is an additional spring (along the connector Y-axis). You can use it to create dynamic, springy and even steerable wheel constructions very easily and quickly, so that nothing stands in the way of creating mobile undercarriages. You can find an example scene under <TEXT_ID TRIGIDBODY-RIGIDBODY_PBD_FRICTION> Friction</TEXT_ID>.
This option only applies to collisions between the two objects connected by the connector. Often during the construction of a scene, when you are trying out basic connector constructions, it would be disruptive to let collision queries take effect.
A MoGraph Selection tag with selected connectors can be accommodated here. Only connectors contained in the selection are evaluated with regard to collisions between the linked Rigid Bodies.
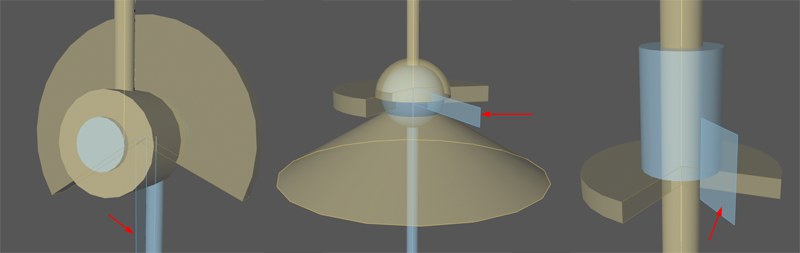
With the Ragdoll connector type, movement can be restricted in a conical space. You can adjust the opening of this cone here.
By activating this option, the (perfect) cone can be deformed into a compressed cone. Cone radius Y will then regulate the compression.
This and the next 4 parameters will only be displayed when using the Wheel Suspension Type.
Steering Angle defines the wheel angle around the Y-axis of the connector. If you animate this parameter, you can simulate real vehicle control.
Suspension Rest Position[-∞..+∞m]
This is used to define the rest position of the integrated suspension, starting from the connector origin. Negative values push the vehicle upwards accordingly.
Suspension Stiffness[0.00..+∞]
The Suspension Stiffness defines how great the forces are that the suspension exerts when the length changes from the rest phase. The harder a suspension is, the harder it is to compress or extend along its length (and the faster it swings).
As you know from your car, there is no suspension without damping ("shock absorber"). This ensures that vibrations subside quickly and the tire always stays on the road. The greater the Suspension Damping, the faster the suspension comes to rest again.
If you have defined angle limits with From or To, you can use this parameter to set how much the movement suspension back when the object hits the stop.
For connector types that allow movement, this can be restricted along the axes and starting from the connector origin.
 Angle limits for various connectors. The stop pointer marked with the middle arrow can only move within the yellow limits.
Angle limits for various connectors. The stop pointer marked with the middle arrow can only move within the yellow limits.
For almost all connector types that allow rotation, you will find angle restrictions that you can define using these parameters.
If no angle limits are defined, the objects can rotate around the hinge center an infinite number of times in the event of a rotary movement (infinitely in the rail direction for movements along a rail).
Please note that the Angle Limits only apply in the range of ONE full turn, i.e., there will be no restrictions à la "Turn 720° and then stop" possible.
The connector type Cardan, which permits 2 planes of rotation, can be additionally restricted by means of Angle Limit 2.
A limit value for the force and/or torque can be entered at Type Fixed. If the force and/or torque acting on the connector exceeds these limit values, the connector gives way and breaks and then behaves as if it were no longer there or switched off.
Please note that you may have to enter very high values (five to six figures are quite possible), depending on the scene and the forces at work.
High values make the connector more stable, while lower values cause it to break earlier.
The small arrow to the left of numerous parameter names can be used to display expandable link fields called Weighting or Selection. MoGraph Selection tags or MoGraph weighting maps are stored here - these can be created interactively with ![]() MoGraph Selection or
MoGraph Selection or ![]() MoGraph Weight Paintbrush by painting on the connectors. Alternatively, these can, of course, also be set using fields.
MoGraph Weight Paintbrush by painting on the connectors. Alternatively, these can, of course, also be set using fields.
This has the following effect:
- Selection: Always assigned to an option. A MoGraph Selection tag defines which connectors the option applies to by means of its stored connector selection.
- Weightings: will always be assigned to a parameter value. This parameter value defines a maximum value that will be assigned to specific connectors by Weighting. If, for example, the parameter value is set to 200 cm and a weighting of 0.5 or 50% is defined, the value 100 cm will affect this connector.
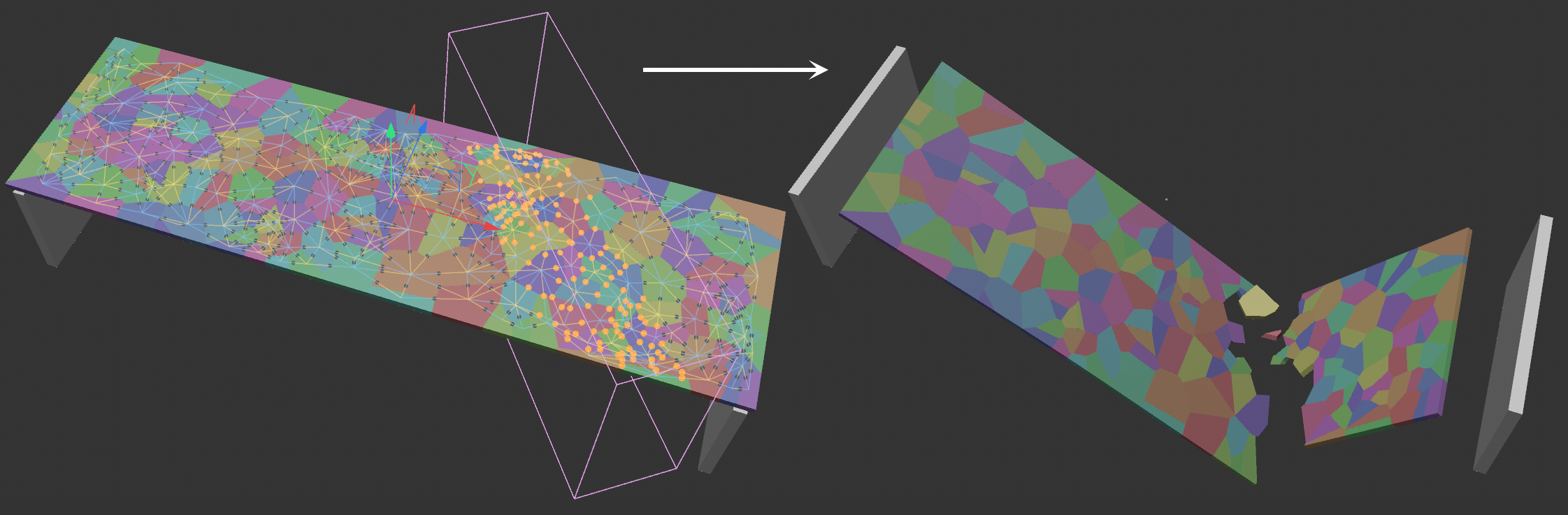 A MoGraph Selection tag (controlled by a cube field) in the selection field of the Breaking force parameter controls the breaking process of a Voronoi breaking object.
A MoGraph Selection tag (controlled by a cube field) in the selection field of the Breaking force parameter controls the breaking process of a Voronoi breaking object.
This object list contains all objects that are connected with connectors. How do you get objects into the list?
- When the connector is created, all currently selected objects will be added to the list.
- You can drag and drop objects into it.
For the connectors to work correctly, the linked objects must be Rigid Bodies (soft bodies also work with Bullet Dynamics).
The order in the list affects the Mode Index.
Create group
You have the option of using the folder icon to create groups with which you can combine elements. No connectors will be created within the elements of a group, but they will be created for the elements of other groups - or elements without a group.
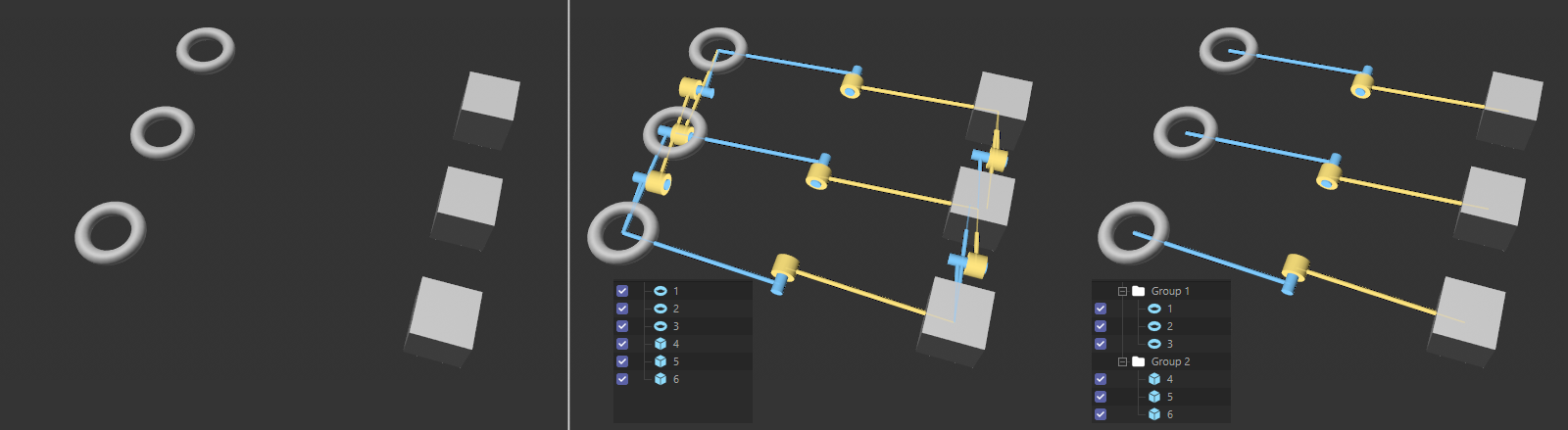 Elements within a folder are not linked with connectors.
Elements within a folder are not linked with connectors.
In the illustration above, the tori should be connected to the cubes opposite each other. In Distance mode, the tori and cube are also initially connected to each other, as they are closer together than their counterparts. If you put both in their own group, connections will only be made to the other group.
Create settings
These settings - which cannot be changed after the start of the simulation until the end of the simulation - can be used to control the automatic connector generation between the Rigid Bodies in the object list.
If there is a Cloner object here, for example, many thousands of connectors can be created, each of which will connect a Rigid Body pair in the middle.
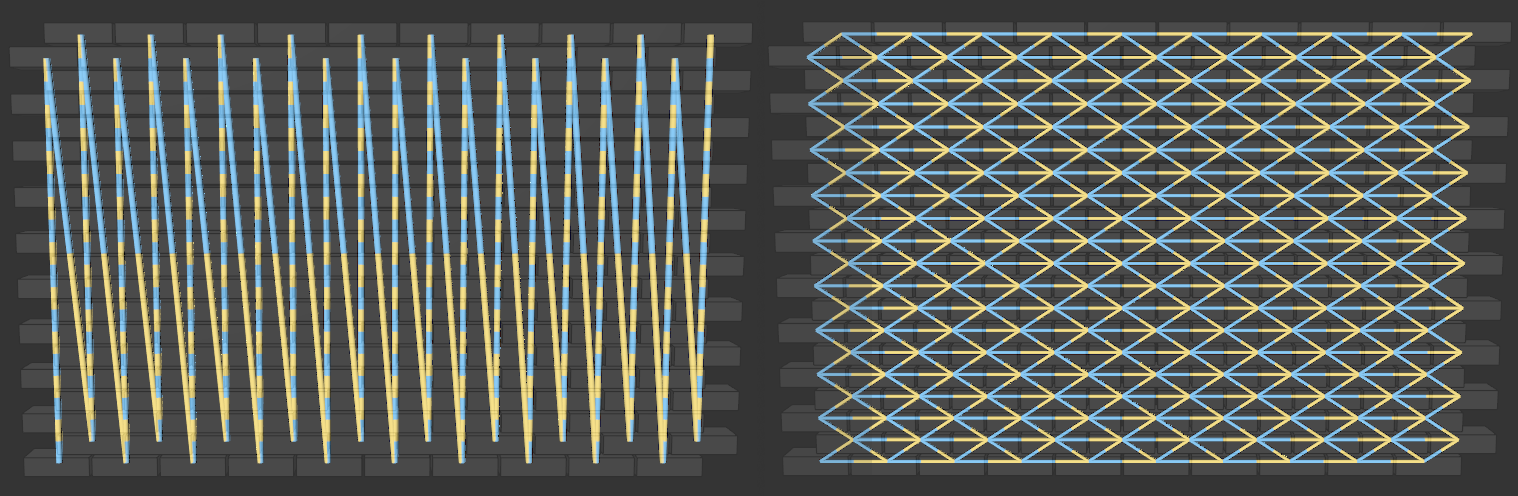 A Cloner object is used to create a brick wall. The tiles are connected as follows using connectors: Index mode on the left, Distance on the right.
A Cloner object is used to create a brick wall. The tiles are connected as follows using connectors: Index mode on the left, Distance on the right.
There are 2 basic modes with which connectors are created - each of which displays different parameters:
The order of the Rigid Bodies is decisive here: The current Rigid Body is always connected to the next one. But what is the "next"? Quite simply: This is determined by the order in the object list. If there is a Clone object here: The clones will be numbered internally (see also Display Indices). the connectors are then created and connected accordingly.
If there are objects in the object list that are parent objects of other objects in the Object Manager, their Child objects will also be taken into account.
As you can see in the image on the left above, it does not necessarily make sense for a tile in the bottom row to be connected to a tile in the top row.
The "more natural" method is therefore the next one:
This mode connects Rigid Bodies based on their distance from each other.
As the Search Radius increases, Rigid Bodies that are spatially close to each other will be connected first. This usually corresponds more to reality than the Index mode. Imagine a brick wall: The individual bricks are connected to their direct neighbors by mortar; not only to the previous/next one, but also to the one above/below. This is exactly what the distance mode is intended for: to connect locally - as shown above on the right.
In this mode, many connectors can also be connected to one and the same Rigid Body - unlike in Index mode, which allows a maximum of 2 connectors.
This option, which is only shown in index mode, connects the first and last Rigid Body in the object list - if there is a Cloner object there, the first and last clone are connected.
The Search Radius defines the distance from Rigid Body to Rigid Body between whose origins connectors are to be created.
The distance is defined from mesh to mesh. The following, therefore, applies: The investigation takes place between the surfaces, between the origins.
If there are any discrepancies here - especially with very long, low-resolution objects - try increasing the resolution of the mesh of the Rigid Bodies involved.
Be careful with large search radii, as this can quickly lead to a huge number of connectors, which slows down the simulation calculations. The following setting can put a stop to this.
Depending on the Search Radius defined, many, many connectors can be created, as all Rigid Bodies within this radius will be connected to all others. To limit the number of connectors, activate Limit Connections and set the number of connections using Max. connections. interactively set an upper limit. Please note that this is not an absolute value, but an upper limit. The Max. setting defines the maximum number of connectors that will be used. but there may be fewer - or even none - of them. This happens, for example, when neighboring objects have already reached their maximum number of connectors.
Placement settings
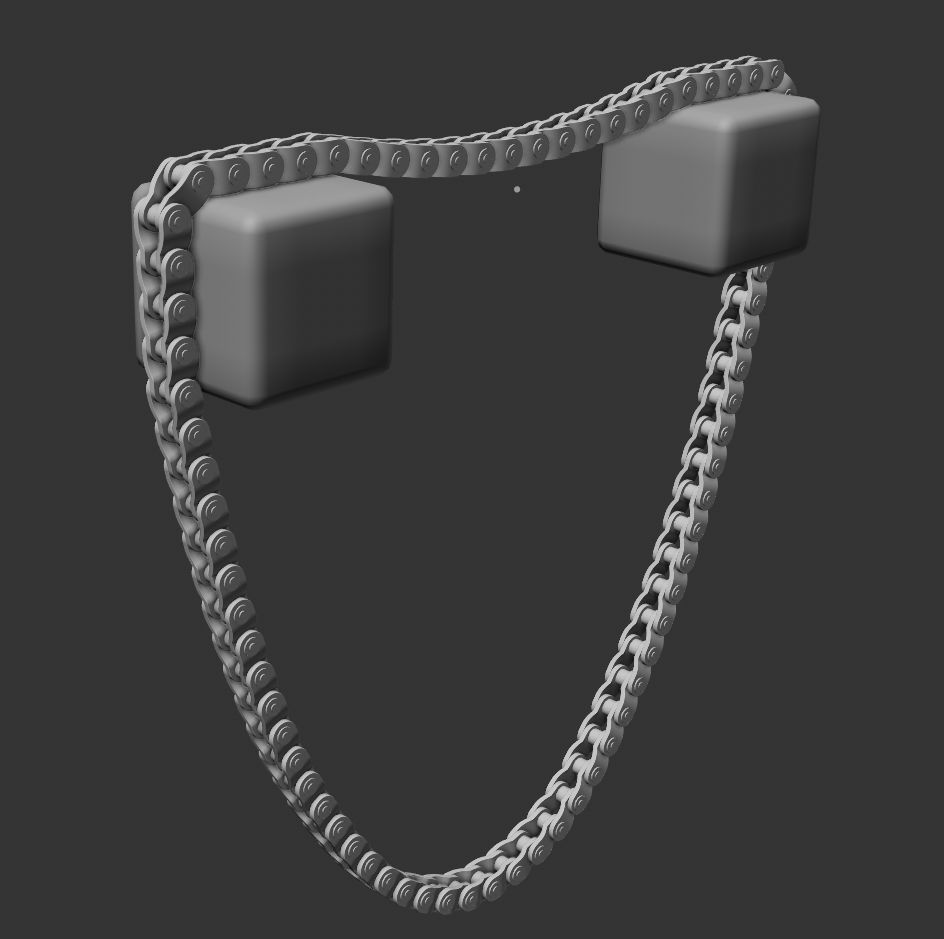 Connectors between the individual chain links create a chain.
Connectors between the individual chain links create a chain.
The following settings relate to the placement and alignment of the automatically generated connectors between the individual Rigid Bodies. While it is easy to place and align connector objects interactively, it is not quite as simple with automatically generated connectors, as these are based on the individual coordinate systems of the linking partners.
You will therefore find a number of settings here that will help you with automatic placement/alignment.
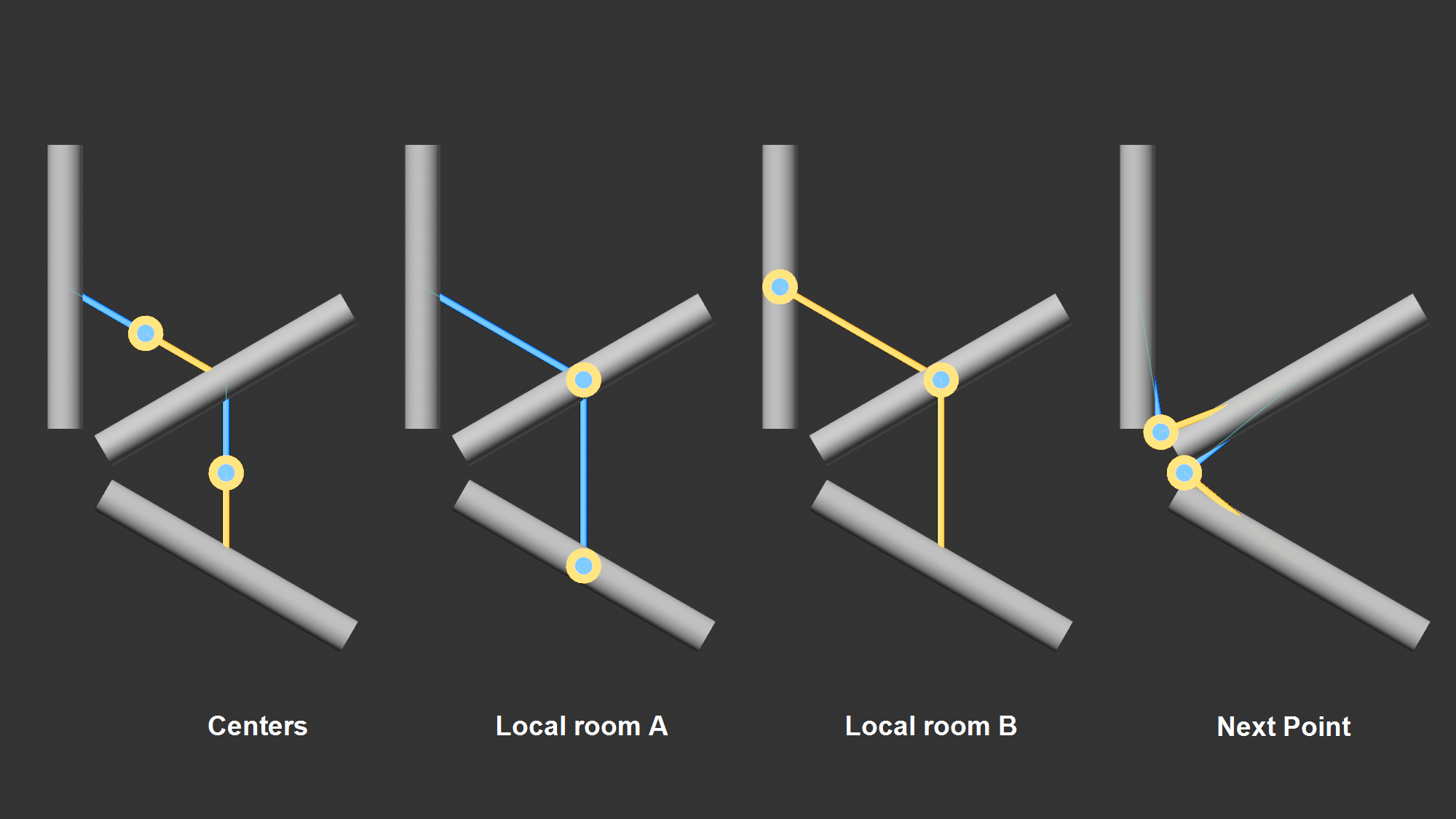 The possible reference position modes.
The possible reference position modes.
Use Reference Position to define where the respective connectors are placed between the link partners A and B.
You can select from the following options:
- Center: The connector is placed in the middle between A and B. More precisely: On a straight line formed by the origins of A and B, where you define with Offset where exactly on this straight line (50% corresponds exactly to the center).
- Local space A/B: The coordinate system of link partner A or B is used here. The connector can be freely positioned using Offset and its X, Y and Z parameters.
- Next Point: Here we try to find the shortest distance between the surfaces of A and B. The connector is placed on this straight line, taking into account the Offset(50% center, 0%/100% surface A/B).
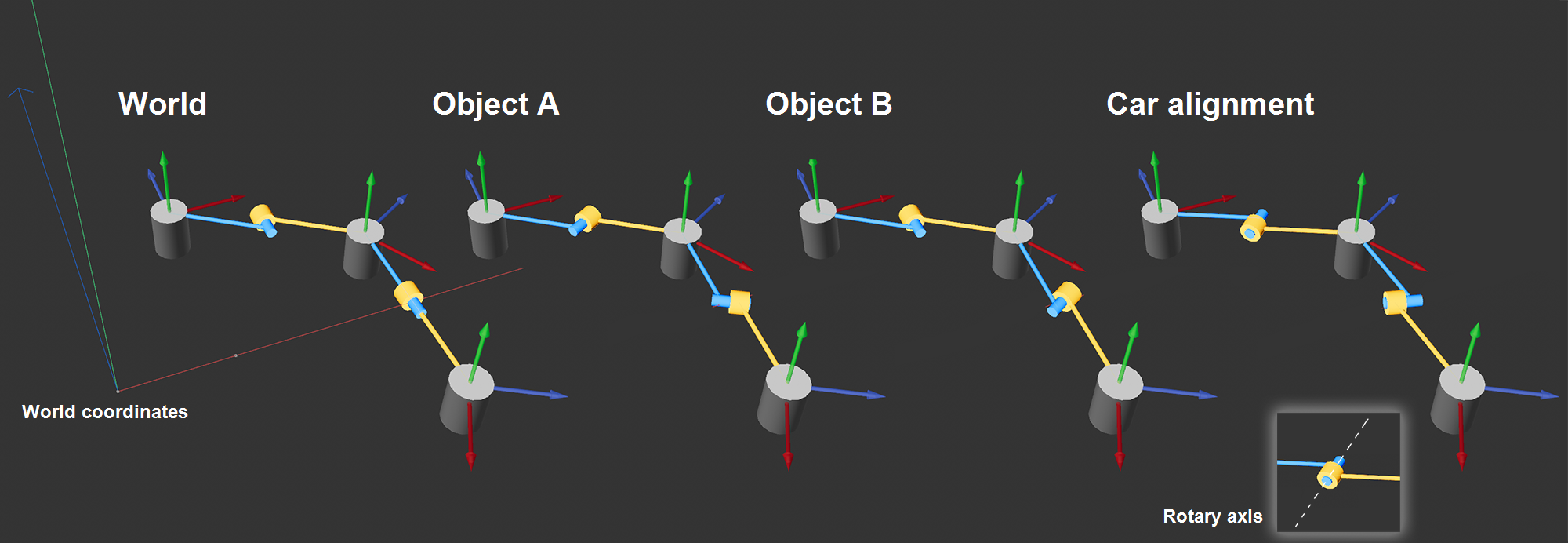 Here you can see how the connector rotary axes are aligned in the different modes.
Here you can see how the connector rotary axes are aligned in the different modes.
With Alignment, you define how the connectors between the link partners A and B are oriented. This is particularly important for hinges, as it determines the axis of rotation. For hinges, the axis of rotation is always the connector Z-axis.
You can choose from:
- World: The connectors are oriented with their Z-axis to the world Z-axis.
- Object A/B: The connectors rotate with their Z-axes in the direction of the Z-axes of object A or object B.
- Auto-Align: The connectors align themselves so that their Z-axes are perpendicular to the connection of the centers of mass of the two rigid bodies involved.
Please also note:
- The connector object can be moved and rotated, which means that the individual connectors it contains can also be moved/rotated around their individual axis.
- The connector object can be made editable by pressing the C key, which gives you direct access to the properties of each individual connector.
If the Auto Create option is activated, connectors are created "live" when the creation settings are changed. This can be very tough with a large number of connectors. In this case, deactivate the option and create and delete connectors with a mouse click using the buttons of the same name.
Create always triggers a new creation of the connectors, taking all settings into account.
This deletes all automatically created connectors. The connector object will be retained.