Object Properties
Define the strength with which the dynamic Rigid Bodies should interact:
- Positive values: Attractive force
- Negative values: Repulsive force
This parameter represents an effective damping of the Force object. An internal force ensures that the speed of all dynamic Rigid Bodies is equalized.
In practice, this is intended to ensure that several orbiting dynamic Rigid Bodies do not circle each other for all eternity, but that they slow each other down until they touch at some point.
Normally, the forces of the Force object are independent of the masses of the Rigid Bodies in terms of their strength. However, if you are using Rigid Bodies with different masses and you want them to exert different forces on each other, activate this option. Lighter Rigid Bodies are accelerated more quickly and exert less force than heavier ones.
Falloff
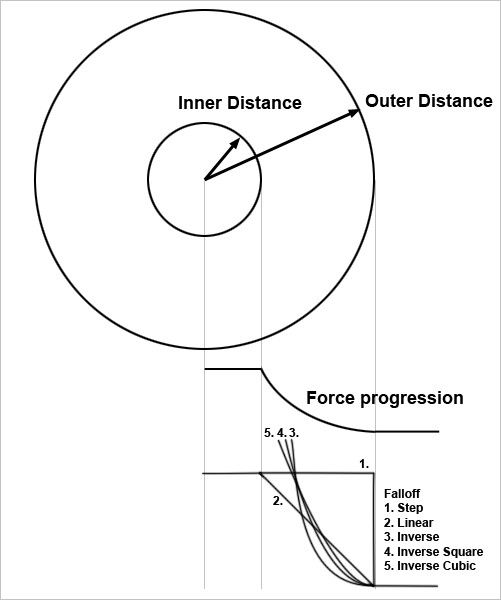
As in reality, forces decrease with the distance between the Rigid Bodies. You set this decrease with the following parameters.
This is the acceptance function between Inner Distance and Outer Distance (see Image).
The force progression is analogous to the figure above. The following applies to Step and Linear: The force is constant up to the Inner Radius and then drops to zero up to the Outer Radius, taking into account the decrease function.
With inverse force progressions, the forces between the two radii reach the defined Strength and increase to a maximum of 10 times the Strength as they approach the inner radius.