Motor
![]()
Un motor es un elemento de simulación que actúa sobre Cuerpos Rígidos en el sistema Simulate -o sobre Cuerpos Blandos en el caso de la dinámica Bullet- y aplica una fuerza o par permanente.
Así, un motor puede servir para accionar las ruedas de un vehículo, una cinta transportadora de rodillos, etc.
A diferencia de su ángulo, la posición de un motor es irrelevante. El ángulo determina la dirección del eje de fuerza o par. Ambos se muestran en el Viewport mediante una visualización del motor.
Si es necesario, asigne el motor a un objeto para que se alinee en consecuencia (en el caso de un modelo de coche, por ejemplo, al chasis), como se muestra en el siguiente ejemplo (véase también Posición del conector).
Ejemplo 1
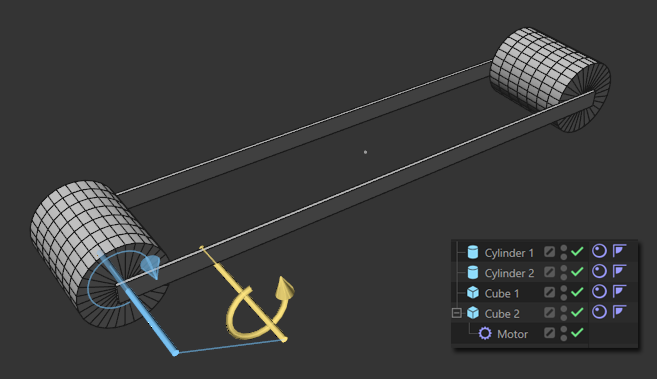 La posición del motor no importa, pero el eje de rotación del motor debe ser paralelo al eje de rotación de la rueda. No se muestran aquí los conectores necesarios.
La posición del motor no importa, pero el eje de rotación del motor debe ser paralelo al eje de rotación de la rueda. No se muestran aquí los conectores necesarios.
Cuando utilices motores, asegúrate de que los objetos accionados están unidos al resto de la geometría con un Conector( modo Bisagra) para que cualquier fuerza generada pueda ser transferida a ellos. En el archivo de ejemplo anterior, el vehículo circula de forma autónoma sobre un objeto del paisaje.
Ejemplo 2
En esta escena, las bolas ruedan por una pista y entran en el campo de acción de un campo cúbico, que a su vez regula un motor lineal para elevar las bolas hacia arriba. Un Nodo Compensación XPresso comprueba si las bolas están en el campo.