Conector
![]()
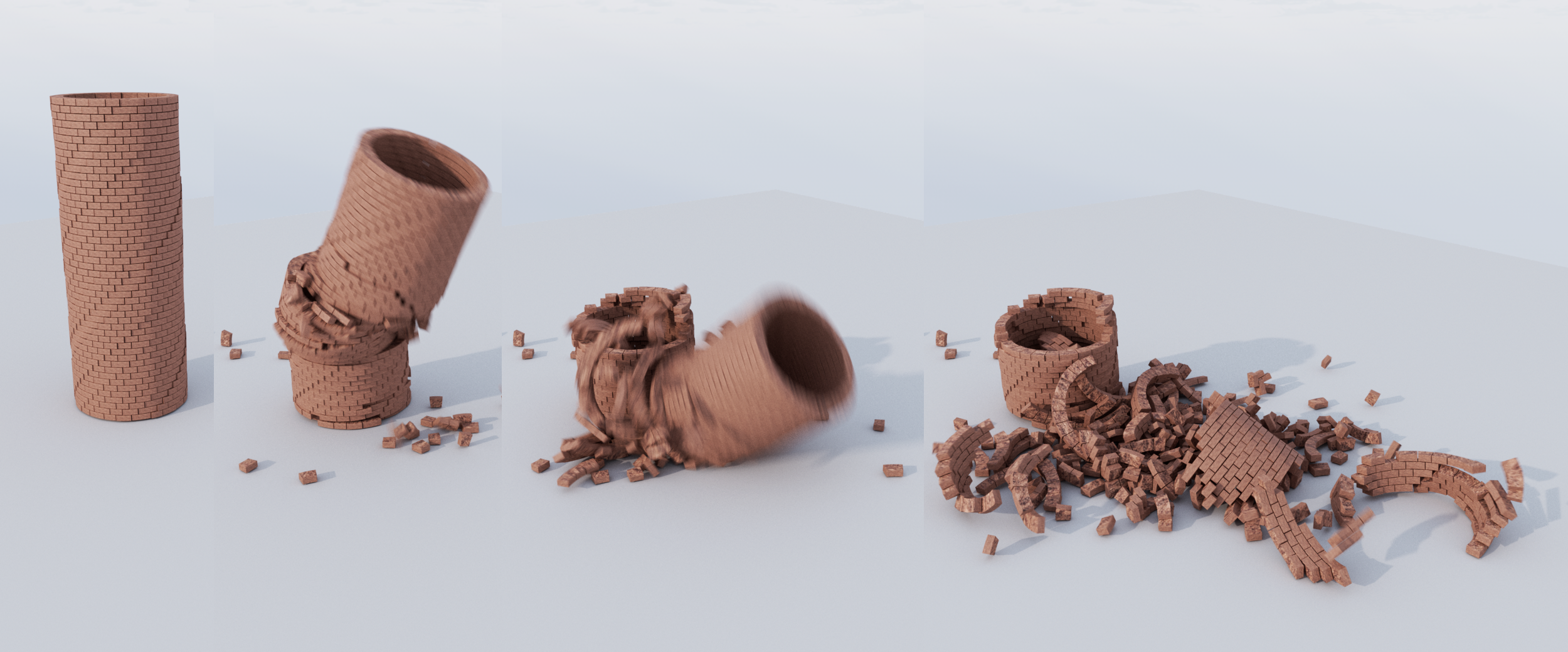 Los conectores de rotura del tipo "sólido" garantizan que no todo se deshaga, sino sólo los conectores sometidos a mayor tensión: muy práctico para las piezas de desecho que siguen conectadas.
Los conectores de rotura del tipo "sólido" garantizan que no todo se deshaga, sino sólo los conectores sometidos a mayor tensión: muy práctico para las piezas de desecho que siguen conectadas.
¿Qué son los conectores?
Los conectores restringen los movimientos/rotaciones de los Cuerpos Rígidos y los Cuerpos Blandos (estos últimos sólo cuando se utiliza Bullet).
Los conectores conectan objetos del siguiente tipo:
- Cuerpos Rígidos.
- Cuerpos Blandos (sólo en combinación con Bullet Dynamics).
Por tanto, los Conectores funcionan conjuntamente con ambos:
- El antiguo sistema Bullet Dynamics, por el que los conectores de las escenas antiguas se convierten en los nuevos.
- El nuevo sistema Simulate.
Sin Conectores, los Cuerpos Rígidos/Suaves sólo reaccionarían ante fuerzas y colisiones. Por ejemplo, crear una simple bisagra de puerta llevaría mucho tiempo. Con un conector (angular Tipo), sin embargo, esto es posible sin ningún problema.
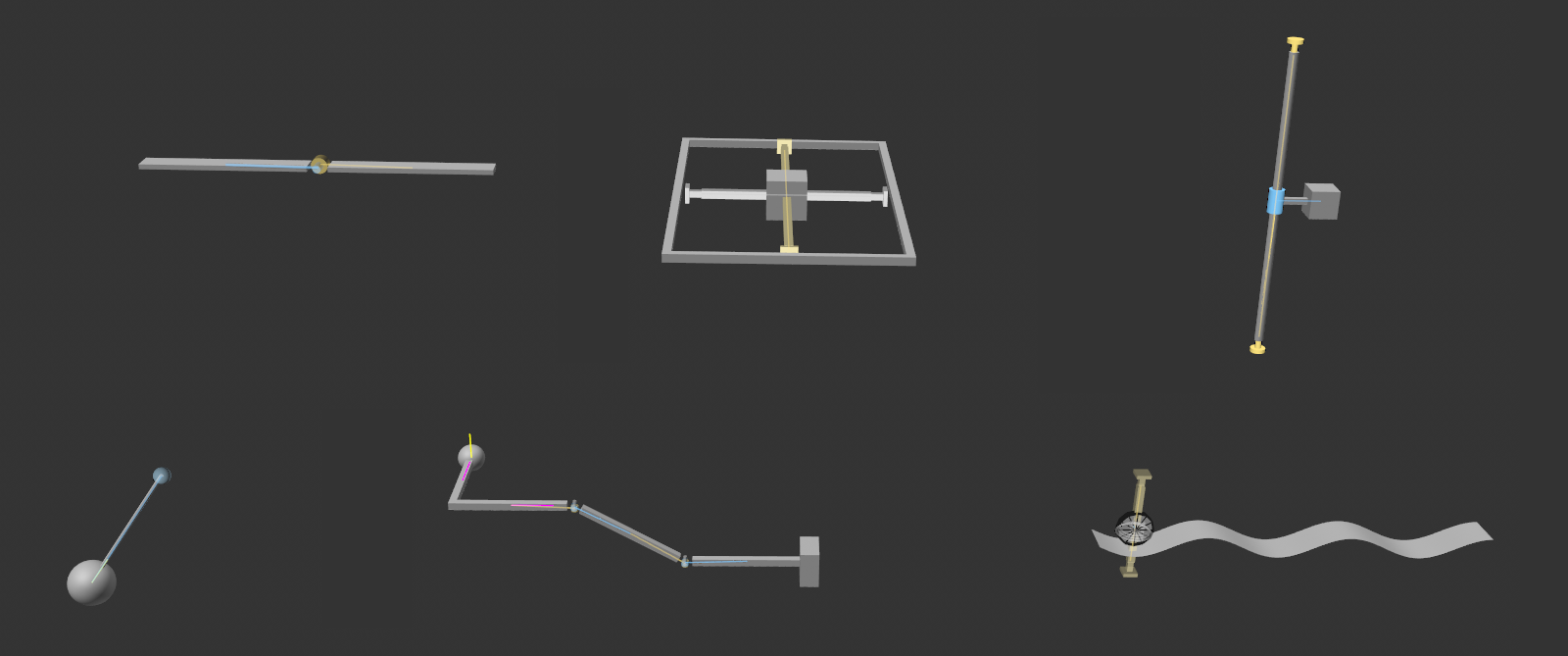
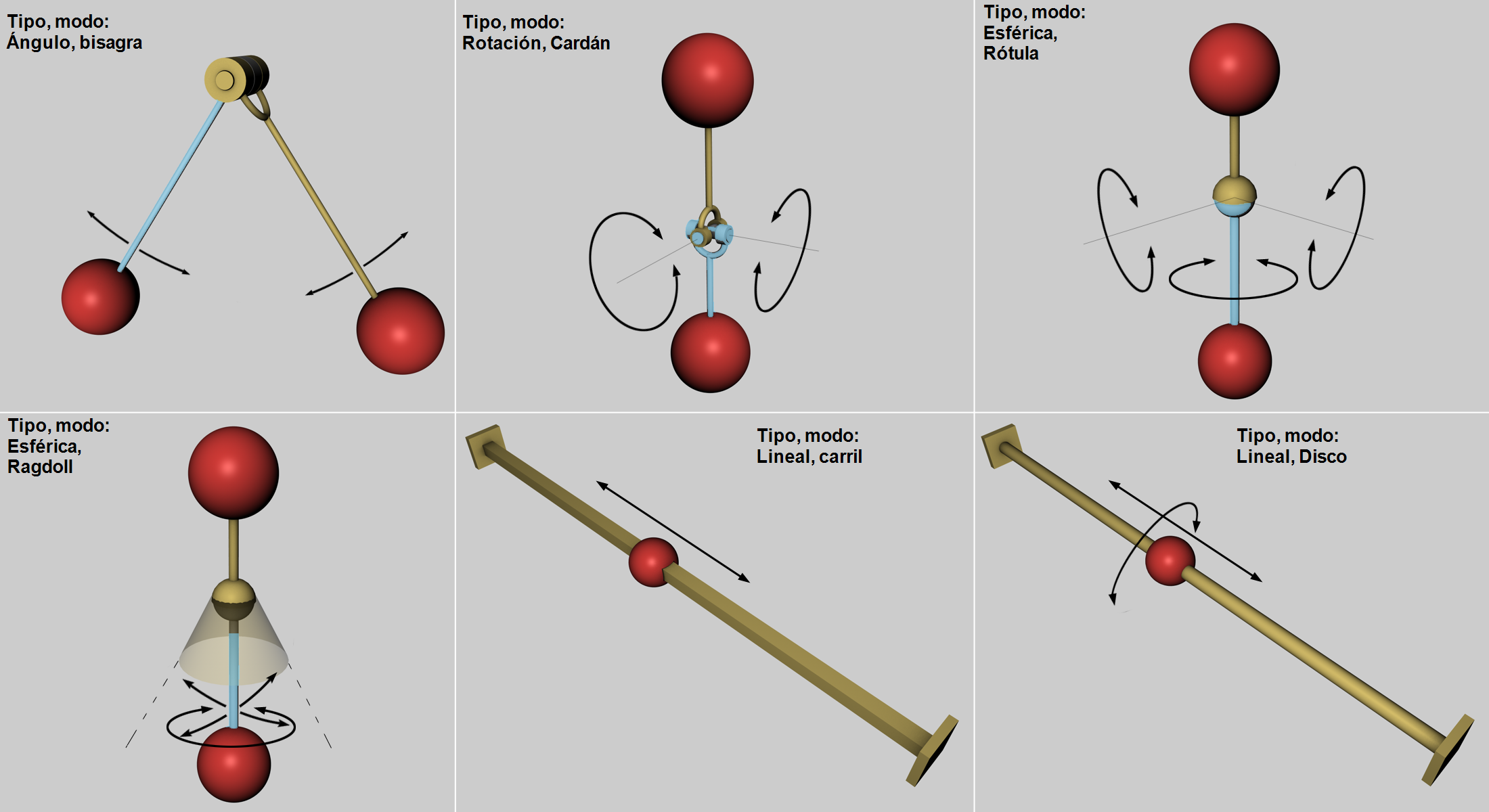 Algunos tipos de conectores Las flechas indican las posibles direcciones de movimiento y rotación. Los modos de suspensión Area, Box y Wheel que no se muestran son básicamente combinaciones de los anteriores.
Algunos tipos de conectores Las flechas indican las posibles direcciones de movimiento y rotación. Los modos de suspensión Area, Box y Wheel que no se muestran son básicamente combinaciones de los anteriores.
Los conectores de tipo fijo son especialmente importantes. No permiten ningún movimiento relativo, sino que simplemente "sólo" mantienen unidos los Cuerpos Rígidos. El truco está en que si se superan las fuerzas definibles, éstas pueden romperse, provocando también la rotura del objeto (véase también más arriba).
Los conectores se muestran en la ventana gráfica con una vista previa funcional para que las restricciones también puedan comprenderse visualmente de un vistazo.
Los conectores que no funcionen se mostrarán en rojo cuando se inicie la simulación. Esto puede ocurrir, por ejemplo, si las dos partes vinculadas no son Cuerpos Rígidos.
Creación interactiva de conectores
Los conectores ya pueden crearse con objetos sin etiqueta Cuerpo rígido. Sin embargo, sólo funcionan correctamente si se han asignado etiquetas Cuerpo rígido.
-
Seleccione los objetos que desea vincular en el Gestor de objetos.
-
Llame a uno de los Conectores en el menú principal en .
-
Desliza o gira el conector en la ventana gráfica hasta la posición correcta (donde haya una bisagra o en paralelo al eje de un deslizador).
Ten en cuenta que los objetos del conector no pueden clonarse. Clonar configuraciones completas (por ejemplo, un vehículo como en el ejemplo siguiente para crear vehículos autónomos) no es posible con el sistema Simulate, pero sí con Bullet Dynamics.
El objeto Conector como contenedor de otros Conectores
El objeto Conector es entonces una especie de contenedor para muchos conectores individuales.
Ahora, por supuesto, sería bueno dar a estos muchos conectores propiedades individuales. Por ejemplo, este Conector especial debería ser el primero en romperse. Hay dos soluciones para esto:
-
Para los parámetros más importantes del Conector, existen campos de enlace ( llamados de selección o ponderación) en los que se pueden alojar etiquetas de selección MoGraph o mapas de ponderación MoGraph (ver también aquí), que controlan las propiedades correspondientes a nivel de conector.
-
El objeto Conector puede resolverse haciéndolo editable( tecla C). Todos los Conectores contenidos se empaquetan entonces como un objeto Conector bajo un objeto nulo. Estos sólo contienen exactamente 2 objetos en su lista de objetos. A continuación, puedes utilizar este método para acceder a la configuración de cada conector individual.
Posición del conector
La posición y orientación del conector son importantes. Definen los ejes de movimiento y rotación. Si observa la imagen anterior, por ejemplo, las posibles direcciones de rotación de las bolas en la bisagra vienen definidas por la posición de la articulación, del mismo modo que la posición del conector Rail define la dirección en la que puede moverse la bola.
La bisagra suele estar situada en un eje de rotación.
Una vez iniciada la simulación, los Conectores se desplazarán automáticamente junto con sus compañeros de enlace de forma significativa. Por lo tanto, el objeto Conector no tiene que colocarse en algún lugar jerárquico para funcionar.
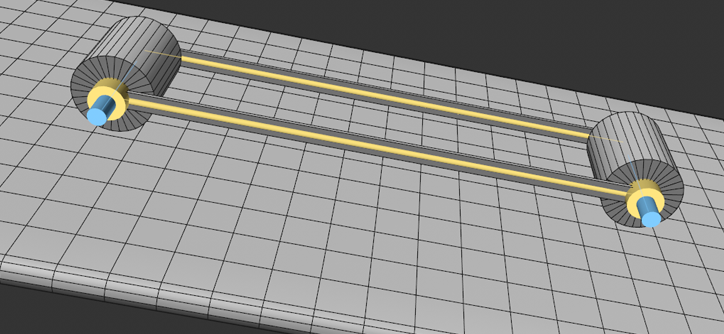
Considere la siguiente escena simple: 2 cilindros, 2 cubos, cada uno con una etiqueta de Cuerpo Rígido (puede descargar la escena terminada más abajo):
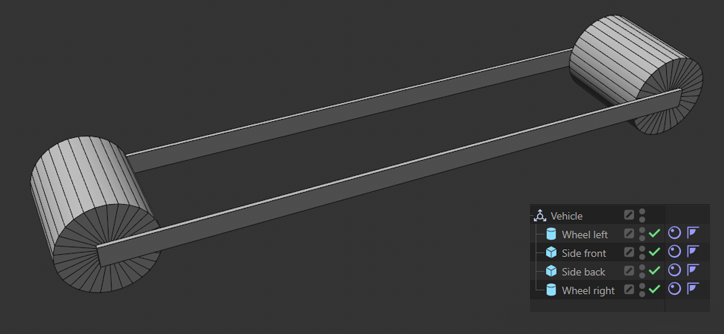
Estos 4 objetos básicos deben convertirse en un vehículo funcional.
Sin conectores, estos 4 componentes simplemente caerán sin interactuar entre sí, aparte de posibles colisiones. Para convertir las piezas en un vehículo funcional, se necesitan 4 conectores del tipo angular, modo bisagra, que conectan los 2 cubos a los ejes de rotación de los cilindros.
Para ello, selecciona los dos objetos a conectar y crea un ángulo Conector. Así pues, estos objetos están vinculados por un conector.
El truco está en que 2 Conectores están situados en el primer eje de rotación del cilindro y los otros dos Conectores en el segundo eje de rotación del cilindro. No importa dónde estén situados los conectores en el eje de rotación. Pueden desplazarse axialmente sin alterar la funcionalidad. Por supuesto, tiene más sentido moverlos a su posición "real", que en este caso serían los cojinetes, es decir, donde se encuentran en realidad las "interfaces" entre los objetos giratorios:
Y con esto ya has creado un vehículo funcional que puede rodar de forma independiente sobre un plano inclinado. Los 4 objetos forman un grupo fijo con cilindros giratorios.
Posicionamiento automático
Estas reglas se aplican cuando se crean nuevos objetos Conectores o Conectores:
-
Si sólo hay 1 objeto en la lista de objetos, el Conector recién creado se situará en el origen del mundo. De este modo, el objeto se conecta inicialmente al centro del mundo - el objeto Conector puede entonces, por supuesto, posicionarse/rotarse libremente.
-
Si hay 2 objetos en la lista de objetos, el conector también se creará en el origen del mundo, pero conectará ambos objetos - el objeto conector puede entonces, por supuesto, ser posicionado/rotado libremente.
-
Si hay 3 o más objetos en la lista de objetos - incluyendo los clones de objetos Clonadores - los Conectores se posicionarán en medio de los pares de objetos conectados. Si ahora rotas/movés el objeto Conector, todos los Conectores que contenga se moverán o rotarán en consecuencia.
¿Conectores imprecisos?
Si tiene la sensación de que los conectores no cumplen al 100% su función, es decir, que ceden o rebotan demasiado, suele ser útil centrarse en la precisión del cálculo de la simulación (representada principalmente por los parámetros Subpasos y Iteraciones).
Otra razón podrían ser las diferencias extremadamente grandes entre las masas de los objetos. A las simulaciones físicas no les suele gustar mucho.
5 comandos del Conector, ¿pero sólo 1 día?
Incluso si puede llamar a 4 tipos de conectores diferentes en , será sólo un objeto conector con diferentes configuraciones de tipo o modo. Pueden modificarse en cualquier momento.
Otros datos de interés
-
Si las simulaciones de muchos objetos son demasiado parecidas, el objeto
 Turbulencia puede poner remedio, por ejemplo, creando un poco de desorden en una colección de clones.
Turbulencia puede poner remedio, por ejemplo, creando un poco de desorden en una colección de clones. -
¿Quieres construir muros y torres que se derrumbarán? Para evitar el efecto muelle al definir los Cuerpos Rígidos al inicio de la simulación, se puede definir Activación En Colisión. Los valores más altos de Subpasos también evitan conectores fijos demasiado "elásticos".
-
Para ilustrar esto, encontrarás algunos tipos de Conectores incluyendo Cuerpos Rígidos en movimiento en la siguiente escena: