Colisionador
La fricción es una medida de la fuerza de frenado que experimenta un objeto al deslizarse sobre otro, o la fuerza que necesita un objeto en reposo para empezar a deslizarse. En física se distingue entre rozamiento estático y dinámico. Cinema 4D no hace esta diferencia, sino que las combina en el único parámetro Fricción.
La fricción sólo tiene lugar cuando se produce la colisión.
Tenga en cuenta que la fricción siempre implica 2 objetos como compañeros de colisión, cada uno de los cuales puede haber definido sus propios valores de fricción. Si un objeto tiene un valor de rozamiento de 0, el rozamiento entre los dos no puede aumentar aunque el otro objeto tenga valores altos.
En general, cuanto mayor sea el valor (puede ser muy superior al 100%), menos probable será que un objeto se deslice sobre otro y más probable será que ruede o dé tumbos si las velocidades son lo suficientemente altas.
Si necesita la fricción de rodadura que también existe en la física: esto se simula hasta cierto punto mediante el ajuste Drenado en los ajustes de Simulación (sin embargo, la Amortiguación también ralentiza los movimientos lineales en consecuencia).
En caso de colisión, este ajuste define la fuerza con la que rebota el Cuerpo Rígido. Este valor sólo debe aumentarse con cuidado, de lo contrario la simulación tenderá a explotar si se definen aquí valores demasiado altos (la energía se introduce en el sistema de simulación de forma análoga a una máquina de movimiento perpetuo, que tiende a ser inestable).
Los valores bajos hacen que los Cuerpos Rígidos choquen como un saco de arena, mientras que los valores crecientes hacen que reboten cada vez más entre sí hasta que explotan con valores muy altos.
Para que una simulación se detenga lo más rápidamente posible, aquí sólo se deben utilizar valores muy pequeños.
Las características de pegajosidad son similares a las de la arena húmeda. Cuando muchos Cuerpos Rígidos pequeños se juntan, forman aglomeraciones.
Por ejemplo, cuando un cilindro pegajoso rueda sobre una pila de Cuerpo Rígido de este tipo, se produce el efecto que se muestra.
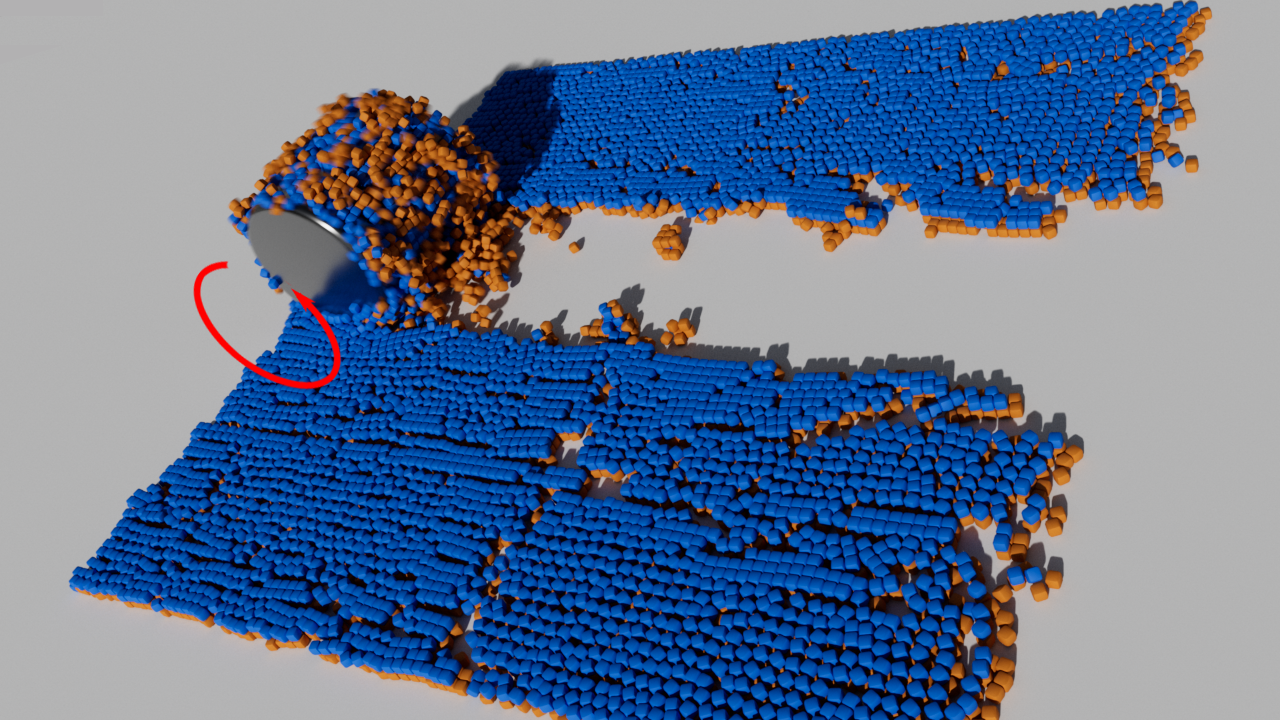
La pegajosidad no es tan adecuada para objetos grandes que se quieren pegar; aunque, hasta cierto punto, también funciona: sin embargo, entonces tienden a pegarse sólo por las esquinas.
Los parámetros denominados Espesor se utilizan siempre en las simulaciones para evitar al máximo las penetraciones. Es una especie de distancia de seguridad alrededor del objeto Simulación, a partir de la cual se produce el caso de colisión y el algoritmo intenta mantener separados los elementos que colisionan.
Por lo tanto, si hay penetraciones visibles, debe aumentar cuidadosamente el valor.
En el caso de los cubos, se aplica este caso especial: si Forma de colisión se establece en Caja, estos pueden apilarse y colisionar sin espacios.
Por su propia naturaleza, no hay colisiones absolutamente perfectas. Siempre debe tener en cuenta que habrá pequeñas penetraciones y huecos. Pero esto puede optimizar. Por ejemplo, con Formas ColisionesCascos Convexos se producen colisiones relativamente precisas a velocidades de cálculo razonables.
Si desea configurar los parámetros anteriores individualmente para cada Cuerpo Rígido, puede utilizar la flecha pequeña situada junto a la mayoría de los parámetros descritos aquí para hacer visible un campo de enlace de ponderación. Las etiquetas de ponderación MoGraph se almacenan aquí - éstas pueden ser creadas interactivamente con ![]() Selección MoGraph o
Selección MoGraph o ![]() Pincel Pesos MoGraph pintando sobre los conectores. Por supuesto, también pueden establecerse mediante campos.
Pincel Pesos MoGraph pintando sobre los conectores. Por supuesto, también pueden establecerse mediante campos.
Estas ponderaciones se asignan siempre al valor de un parámetro. Este valor de parámetro define un valor máximo que se establece específicamente para el Cuerpo Rígido individual mediante ponderación. Por ejemplo, si el valor del parámetro se establece en 200 y se define una ponderación de 0,5 o 50%, se aplica el valor 100 a este Cuerpo Rígido.
Ejemplo
En la siguiente escena, los neumáticos se colocan utilizando un objeto clon y se conectan al "chasis" utilizando un objeto Connect ( tipo suspensión de rueda). Si te fijas bien, el par de neumáticos del eje central -el sexto- está bloqueado. Para ello, se creó un Campo Cubo que establece los dos Cuerpos Rígidos a fricción = 0.
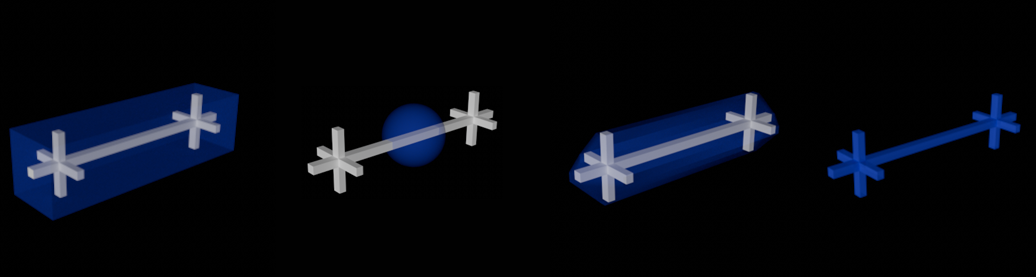 De izquierda a derecha: Formas de colisión en azul: Caja, Esfera, Cascos convexos (precisión de la geometría = 0, pero puede mejorarse mucho con valores más altos), Malla triangular.
De izquierda a derecha: Formas de colisión en azul: Caja, Esfera, Cascos convexos (precisión de la geometría = 0, pero puede mejorarse mucho con valores más altos), Malla triangular.
Los cálculos de detección de colisiones suelen ser intensos desde el punto de vista informático. Sin embargo, sólo ellas conducen a movimientos convincentes de los objetos: los cuerpos pueden chocar con otros, detenerse por rozamiento, etc.
Cuanto más compleja sea la forma del cuerpo, más complejo será su cálculo de colisiones. Por lo tanto, en este menú desplegable hay algunas formas sustitutivas rápidas de calcular que pueden colocarse sobre el objeto real. En la simulación, a menudo no es posible saber a distancia si para el cálculo de la colisión se ha utilizado la forma real del objeto o, por ejemplo, sólo una caja ajustada automáticamente al tamaño del objeto.
El orden en términos de velocidad de cálculo y precisión de colisión es aproximadamente el siguiente (del más rápido/más impreciso al más lento/más preciso): Caja, Esfera, Cascos convexos, Malla triangular. En detalle:
Auto
Si Cinema 4D detecta que se han utilizado las primitivas Cubo y Esfera, se calcularán internamente de forma automática con las opciones Caja y Esfera. De lo contrario, se utilizarán cascos convexos (la precisión de geometría por defecto 5 será suficiente para la mayoría de los casos y seguirá comprobando la colisión muy rápidamente).
Atención, Auto sólo está disponible para Cuerpos Rígidos, no para objetos de Colisión.
Malla triangular
El objeto al que se asigna la etiqueta se define con su forma completa como la forma de colisión, lo que hace que esta opción sea la más lenta, pero respecto a la colisión la mejor, porque se utiliza la forma exacta del objeto para el cálculo de la colisión.
Sin embargo, los cascos convexos con mayor precisión geométrica a menudo pueden calcular colisiones igual de buenas, pero mucho más rápido.
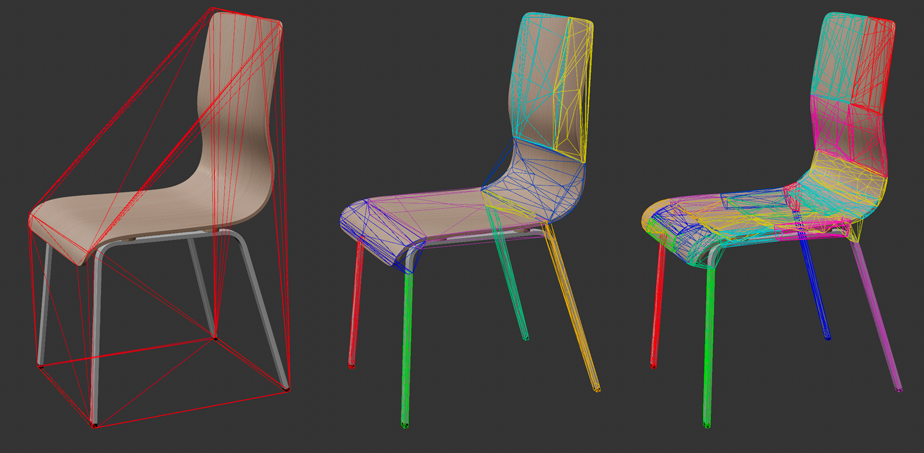
En este caso, se colocan uno o varios cascos envolventes alrededor del objeto o sus partes, que se comportan de forma similar a una piel de goma. Aparece el parámetro Precisión de la geometría, que define el número de "pieles de goma".
Por cierto, esta creación de forma equivalente funciona exactamente como ya se ha descrito para la herramienta de colocación en Precisión.
Si desea visualizar la forma de la colisión, active la opción Cuerpo Rígido Formas en la pestaña Simulación del menú Preferencias. Para ello, debe iniciar la simulación o saltar un fotograma hacia delante desde el fotograma inicial.
Esfera
Como forma de colisión se utiliza una esfera ajustada al cuadro delimitador del objeto.
Caja
La caja más pequeña que incluya todos los puntos del objeto se utilizará como forma de colisión.
Aquí puede definir el lado del polígono a partir del cual se comprobarán las colisiones. Puedes elegir entre:
- Frontal: Las colisiones sólo se producirán cuando los componentes de colisión se aproximen desde el exterior (con respecto a las Normales).
- Atrás: Las colisiones sólo se producirán cuando los componentes de colisión se acerquen por detrás (respecto a las Normales).
- Ambos: Las colisiones se producirán en ambos lados.
Este ajuste adquiere mayor relevancia cuando se producen penetraciones en colisiones. Las penetraciones casi nunca son deseadas. Una vez que los objetos se cruzan, es difícil volver a separarlos al fijar ambos. Si, por elcontrario,tiene Front seleccionado, será fácil separar los objetos. De hecho, en aquellos lugares en los que tenga sentido, se establecerá internamente un pequeño impulso que ayudará a mantener los objetos separados.
Este parámetro se muestra si se selecciona Auto (sólo Cuerpos Rígidos) o Envolvente Convexa en Formas de Colisión (ver también Cascos Convexos).
Con valores crecientes, la forma de colisión se aproximará a la forma real del objeto sin alcanzarla exactamente: Sin embargo, el cálculo es mucho más rápido que con Malla triangular.
Si se ajusta a 0, las hendiduras o rebajes u orificios no se incluirán en el cálculo de colisión, sino que se colocará una única "piel de goma" alrededor del objeto, como se muestra a la izquierda:
Nivel Fusión Jerarquía[0..2147483647]
Los generadores que generan clones, como los objetos Cloner o Array, pueden duplicarse aún más mediante anidamiento (este ajuste sólo funciona si la etiqueta está en un objeto de este tipo). Por ejemplo, si un objeto Clonar primero clona linealmente un cubo, y luego un segundo clonador vuelve a duplicar radialmente todo el conglomerado de clones, y luego lo clona en una malla, usa este valor para definir los niveles jerárquicos, cada uno de los cuales debe funcionar como su propio Cuerpo Rígido. Se contará desde abajo: 0 hará que cada clon sea un Cuerpo Rígido, 1 sólo la primera jerarquía de clones (en el ejemplo del clonador lineal), etc. En el ejemplo mostrado, 3 consideraría entonces todo el conglomerado de clones como un único Cuerpo Rígido.
Las jerarquías normales que se encuentran por debajo del objeto con etiqueta (es decir, sin más clones como en el ejemplo anterior) funcionan de la misma manera. Tenga en cuenta que, por lo demás, sólo los objetos editables funcionan actualmente como se ha descrito (por ejemplo, no hay objetos básicos, haga que éstos sean editables pulsando la tecla C).
En Cinema 4D hay muchas formas de modificar objetos mediante el Deformador. Active esta opción si desea utilizar esta deformación como forma de colisión. Actualmente no se admiten las deformaciones animadas: se utilizará la forma al inicio de la simulación.