Simulación
La mayoría de los siguientes ajustes pueden ser animados. Esto permite adaptar los ajustes a las diferentes fases de la simulación. Puede, por ejemplo, aumentar los ajustes de renderización intensiva, como los subpasos o las iteraciones , si es realmente necesario y, por ejemplo, en las fases en las que no se producen colisiones, estos valores pueden reducirse para acelerar la simulación.
Este parámetro es crucial para la precisión de la simulación. Cuanto más alto sea el valor, más preciso será el cálculo y más precisa será la detección de colisiones (con los correspondientes tiempos de cálculo más largos).
Cada fotograma de la animación se divide internamente de forma temporal con los Subpasos especificados aquí. Se ejecutará un algoritmo de simulación (cálculo del efecto de la restricción, posiciones y velocidad del objeto, etc.) para cada subpaso.
Especialmente en el caso de penetraciones a alta velocidad, la velocidad debe aumentar este valor. Imagina un objeto que viaja a gran velocidad y que choca con una tela colgante. Supongamos que el objeto está a la izquierda de la tela en el fotograma 12 y a su derecha en el 13. Cinema 4D no detecta una colisión (si Substeps está ajustado a 1). Con múltiples Substeps que, por ejemplo, calculen el fotograma "12.2" y "12.3", la colisión se detectaría y calcularía correctamente.
Esto es una desventaja: los subpasos (y las iteraciones) influyen en la rigidez de los objetos de ropa que se van a simular. Cuanto más grandes sean los Subpasos/Iteraciones, más rígida será la tela (es decir, más precisa será la curvatura/estiramiento).
En pocas palabras: aplicar un gran número de subpasos e iteraciones producirá un resultado correspondientemente más realista. La mayoría de las veces, estos valores deben mantenerse bajos para que la velocidad de cálculo sea manejable. Esto significa que el solucionador, que tiene que tener en cuenta innumerables restricciones, toma atajos y se desvía de un resultado realista. Estas desviaciones se manifiestan principalmente en la falta de rigidez (comportamiento gomoso), pero también en colisiones imprecisas, etc. en algunos casos.
Tenga en cuenta que valores muy altos (por ejemplo, 200) pueden provocar un comportamiento paradójico: en lugar de aumentar la precisión, disminuye. La razón de esto es la precisión de 32 bits de la GPU Intente en cambio aumentar la siguiente configuración de Iteración - en lugar de Subpasos. Consulte también los Consejos y Trucos para conocer las medidas adicionales que se pueden tomar.
Internamente, se utiliza un algoritmo iterativo que se aproxima lo más posible al resultado final matemáticamente óptimo (= se cumplen todas las restricciones). Las Iteraciones definen la frecuencia con la que se calculan las numerosas restricciones por Substep.
El impacto práctico, por ejemplo, en el comportamiento de la ropa es: el tejido se vuelve más rígido, porque las restricciones se mantienen mejor.
Los valores más altos pueden ayudar a evitar la fluctuación de puntos.
Véase también el parámetro anterior Subpasos, ambos ajustes están estrechamente relacionados y tienen efectos similares.
Si establece Iteraciones en 0, se utiliza internamente un solucionador diferente, que converge más lentamente que el solucionador estándar, es decir, en un sentido figurado trata las restricciones de forma algo más laxa. Las Iteraciones de Suavizado se establecerán en 1.
Esto permite conseguir una mayor robustez y homogeneidad de la simulación. Sin embargo, la tela y las cuerdas serán entonces más elásticas.
Especialmente en las simulaciones con muchas restricciones que a veces trabajan unas contra otras -por ejemplo, la restricción A quiere mover un punto a la izquierda, la restricción B a la derecha- esto puede llevar a un jitter de puntos (ver también el siguiente párrafo). En estos casos, el otro solucionador puede producir mejores resultados.
Para compensar la mayor ductilidad, más gomosa, se recomienda aumentar los Substeps.
Evitar la fluctuación.
Los dos ajustes siguientes se utilizan principalmente para reducir las fluctuaciones que se producen en zonas pequeñas.
En general, también puede ayudar a reducir los Subpasos y aumentar las Iteraciones.
Iteraciones Suavizado[0..1000]
Los cálculos internos de los puntos debidos a las diversas restricciones que "tiran" de ellos pueden dar lugar a grandes desviaciones de los puntos, lo que puede dar la impresión de que se producen impulsos adicionales y repentinos.
Con Iteraciones de suavizado > 0, se realizan cálculos de promedio adicionales, con lo que este efecto pierde su efecto, es decir, hay menos fluctuación.
Utilice este parámetro sólo si es necesario, ya que puede provocar efectos secundarios como la modificación de la rigidez.
Con este ajuste, se puede eliminar la velocidad/energía del sistema. Se recomiendan valores menores de hasta el 3%. Los valores más altos harán que la simulación se vea más como si estuviera bajo el agua.
Las simulaciones tienden a "explotar" ocasionalmente, esto se puede contrarrestar aumentando cuidadosamente este valor.
También se pueden definir valores de amortiguación -aquí incluso por separado para movimientos lineales y giratorios- en el nivel de etiqueta correspondiente (por ejemplo, Anular)
Estos dos ajustes se utilizan principalmente para evitar estados de simulación inestables, que podrían culminar en una congelación de la simulación. Se limitan las velocidades o aceleraciones excesivamente altas (ambas en el nivel del punto). Esto ayuda a reducir las colisiones y evitar la penetración que, de otro modo, requeriría valores prohibitivos para los ajustes de Pasos y/o Subpasos para lograr el mismo efecto.
También hay que mencionar un efecto llamado "TDR (Timeout Detection & Recovery)", un mecanismo de protección del sistema operativo que detiene la simulación con un mensaje de error cuando la tarjeta gráfica se sobrecarga. Este efecto también puede reducirse con ambos ajustes.
Los dos métodos tienen la desventaja de que la simulación se ejecuta de forma más estable, pero esto es a costa del realismo, porque toda la simulación está amortiguada.
Entonces úsalo:
-
Fijacion de velocidad: este modo es apropiado cuando los objetos simplemente se mueven a velocidades muy altas sin (o sólo con pequeñas) aceleraciones.
-
Fijacion de Aceleración: si hay penetraciones en las colisiones, que pueden parecer saltos puntuales repentinos (= alta aceleración) allí, esta opción es la adecuada.
Nótese la diferencia fundamental entre pinza de velocidad y aceleración: en el primer caso, la velocidad está realmente limitada, mientras que en el segundo, aunque no haya crecimiento de la aceleración, puede haber crecimiento de la velocidad (mientras haya aceleración -positiva-, mientras crezca la velocidad).
Para la Fijación de velocidad: Tiene las siguientes opciones:
-
Desactivado: No se sujeta la velocidad.
-
Escala de la escena: Se limita a un valor porcentual de la velocidad que depende del cuadro delimitador del objeto más grande presente en la escena o del objeto de la escena de simulación. La velocidad se aplica globalmente.
-
Absoluto: La velocidad se limita a la velocidad del punto absoluto. La velocidad se aplica globalmente.
-
Radio de colisión: Se limita a un valor porcentual de la velocidad que depende del respectivo radio de colisión (grosor o radio) alrededor de cada punto. Como el grosor depende de la densidad de la malla, por un lado, y puede controlarse mediante el mapa de vértices, por otro, la velocidad por punto puede variar. Esto significa que la velocidad para espesores muy bajos está tapada localmente con más fuerza.
Esto no es tan fácil de entender. En principio, se define la velocidad máxima permitida que depende de ciertos factores.
Desde Caja Delimitadora
Defina aquí la velocidad máxima permitida si ha establecido la escala de la escena anteriormente.
Tamaño
Defina aquí la velocidad máxima permitida si ha establecido Absoluto más arriba.
Radio
Aquí puede definir la velocidad máxima permitida si ha establecido el Radio de colisión más arriba.
Para la Fijación de Aceleración tiene las siguientes opciones:
-
Apagado: No se sujeta la aceleración.
-
Escala de la escena: Se limita a un valor porcentual de aceleración que depende del cuadro delimitador del objeto más grande presente en la escena o del objeto de la escena de simulación.
Desde Caja Delimitadora
Aquí puede definir la aceleración máxima permitida si ha definido la Escala de la Escena anteriormente.

La detección de colisiones es inmensamente importante; en primer lugar, tiene un aspecto antiestético cuando se producen penetraciones y, en segundo lugar, una vez que esto ha sucedido, las zonas penetradas se adhieren tenazmente entre sí y son difíciles de separar. Por eso hay una serie de ajustes separados (más abajo) que sólo afectan a la colisión y que pueden calcularse más rápidamente que si se aumentan los valores de Subpasos e Iteraciones , que requieren mucho tiempo de cálculo y además modifican propiedades importantes como la rigidez de la tela.
Estos ajustes de colisión se refieren a procesos de cálculo internos y suenan complicados en la descripción, y en principio lo son, aunque ya se han descrito de la forma más sencilla posible. En general, los valores deben aumentarse con cuidado si las colisiones son problemáticas.
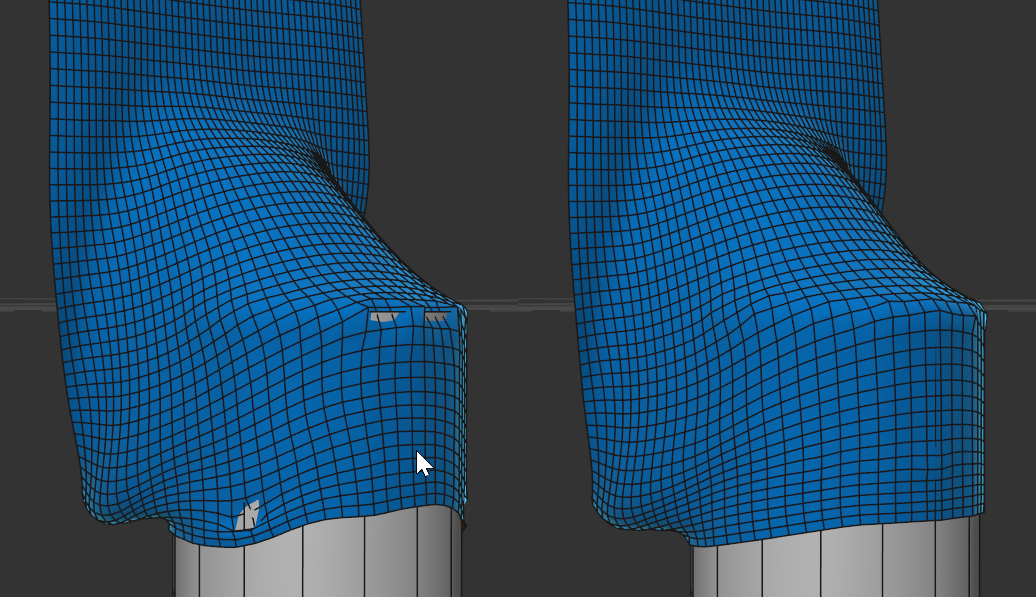 Un textil en movimiento rápido choca con un cilindro, con pases 0 hay penetraciones en el lado izquierdo, en el lado derecho no hay penetraciones con un valor de 5.
Un textil en movimiento rápido choca con un cilindro, con pases 0 hay penetraciones en el lado izquierdo, en el lado derecho no hay penetraciones con un valor de 5.
Define la frecuencia con la que se realiza la detección de colisiones por cada fotograma de la animación. Si se detecta una colisión, se crean restricciones de colisión dinámicas y temporales (cuya precisión puede controlarse mediante los 3 ajustes siguientes) que garantizan que el objeto al que se asigna la etiqueta no puede penetrar en otra geometría de colisión -o en la suya propia-.
Si define aquí un valor de 1, se realiza una detección de colisión al inicio temporal del fotograma de simulación. Cualquier restricción de colisión que se cree se mantendrá hasta la siguiente detección de colisión y se tendrá en cuenta y se evaluará para cada Subpaso.
Especialmente en el caso de geometrías rápidas, de rotación rápida o de movimiento generalmente no lineal, aumentar este valor puede ser ventajoso. Para casi cualquier penetración, aumentar los Pases puede ser útil.
Asegúrese de que Subpasos no es menor que Pasos, de lo contrario no pasará nada.
Por medio de este parámetro, se realizan iteraciones adicionales sólo para las restricciones de colisión preexistentes encontradas previamente por los pases y el pase de fin de cuadro. Esto también ayuda a evitar colisiones.
Asegúrese de que antes de aumentar los Pases, el marco final de pase y/o los Subpasos, pruebe a activar esta opción aquí primero. Esto puede ser todo lo que se necesita. Las iteraciones adicionales pueden calcularse con relativa rapidez.
Este parámetro inserta consultas de colisión adicionales al final temporal de la trama de simulación, donde en realidad ya se han calculado todas las nuevas posiciones de los puntos. Esto debería evitar que las penetraciones existentes (que el algoritmo supervisó inicialmente) estén presentes cuando se calcule el siguiente fotograma de simulación, lo que podría ser problemático para la simulación. Para cada proceso, las restricciones de colisión recién descubiertas se calcularán varias veces (con la frecuencia definida en Iteraciones).
Tenga en cuenta que sólo los valores pequeños en el rango de 1-3 proporcionan un beneficio.
También se puede aumentar el valor de los pases , pero el pase de cuadro final suele ser más rápido.
Especialmente con objetos de colisión en movimiento, aumentar el Paso de Fotograma Final (y también las Iteraciones Extra) puede llevar a mejores resultados.
Con estos ajustes se pueden visualizar algunos elementos de la simulación. Estos sólo tienen un propósito informativo La opción Dibujo se puede utilizar para activar o desactivar la configuración de la pantalla para los siguientes ajustes.
Tenga en cuenta que los elementos se muestran realmente sólo cuando se inicia la simulación (normalmente, por tanto, a partir del fotograma 1).
Permite visualizar los puntos del objeto simulado. También se mostrará el radio de colisión(Grosor o Radio para mallas o splines).
Aquí puede visualizarse el radio de colisión definido por el ajuste Espesor para la mayoría de los objetos con capacidad de colisión Simular. Para Telas, Cuerpos Blandos, etc. se muestran alrededor de cada punto de la malla, mientras que para Cuerpos Rígidos se visualizará la forma de la colisión más el añadido Grosor.
Esta opción está pensada para splines con etiqueta Cuerda. Aparecerá un vector verde entre cada punto de la spline. Cuanto más fuertes sean las restricciones internas del spline, menos se desviarán los vectores de la alineación de sus vecinos durante la simulación (preste especial atención a la opción Ondulado ).
Esto permite mostrar las restricciones de estiramiento que preservan la estructura. Éstas siempre discurren entre puntos de objetos vecinos y conexiones diagonales conectables (véase también Quads Diagonales).
Este modo -que no es muy informativo- muestra las restricciones de flexión que garantizan que un objeto de ropa no se colapse simplemente sobre sí mismo, sino que los cambios de ángulo entre los polígonos se opongan a una cierta resistencia.
Mediante esta opción, se pueden mostrar las restricciones del Poste (aunque estén desactivadas en la pestaña Cuerpo blando). Si los postes se desgarran, esto también se representará ocultando estos postes; la opción Dibujar debe estar desactivada.
Esta opción puede utilizarse para mostrar las restricciones de los conectores (incluso si están desactivadas en la etiqueta del conector o si no se ha seleccionado ninguna etiqueta del conector). Si los postes se desgarran, esto también se representará ocultando estos postes; la opción Dibujar debe estar desactivada.
Se utiliza para marcar el centro de masa para Cuerpos Rígidos con un sistema de ejes pequeño. Aquí es donde la fuerza del peso se impone. El centro de masa puede posicionarse libremente en los ajustes de Cuerpo rígido.
En Formas Colisiones, por ejemplo, se puede especificar una forma de colisión sustitutiva rápidamente computable. Esta opción muestra la forma de colisión activa en la vista. Si los Cuerpos Rígidos están desactivados, su forma se mostrará en negro.