Note :Dans cet onglet, vous trouverez quelques paramètres qui ne fonctionnent pas encore pour le système Simulation, mais seulement pour l'ancienne dynamique Bullet. Il s'agit par exemple de la fonction Lier. Veuillez les ignorer lorsque vous utilisez le système de Simulation.
Type
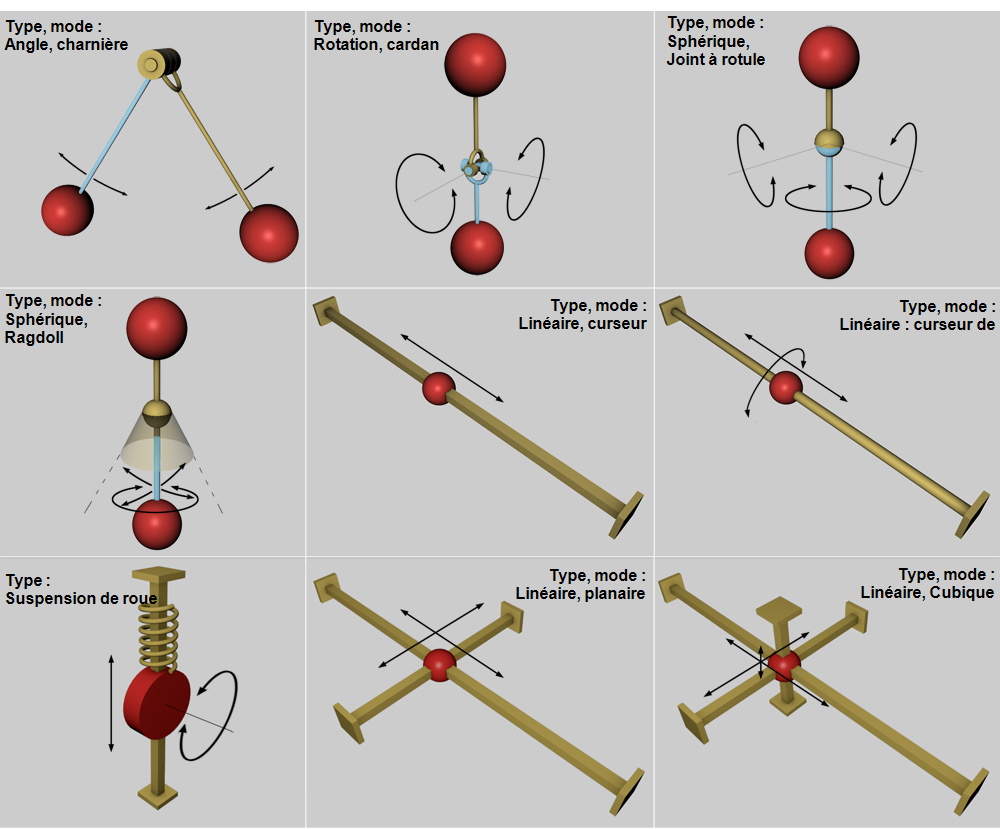
Les différents connecteurs. Le mode fixe n'est pas affiché.
Vous pouvez définir 5 types de connecteurs avec Type (correspondant aux 5 commandes sous Simuler | Connecteurs dans le menu principal), qui peuvent ensuite être définis plus en détail avec Mode. Les modes suivants sont disponibles :
Mode
Fixe
Cela ne permet aucun mouvement relatif entre les objets. Cela permet de relier des objets constitués de pièces individuelles.
Charnière
Une charnière ne permet qu'un mouvement de rotation autour du point central de la charnière. Le mouvement de rotation s'effectue exclusivement dans le plan délimité par les axes X et Y du connecteur.
L'angle de mouvement peut être limité.
Cardan
En principe, un joint universel se compose de deux charnières fixées à une croix décalée de 90°. Il en résulte des mouvements relativement compliqués.
L'application typique d'un joint universel est la transmission du couple dans les virages. Pour que cela fonctionne, deux conditions préalables doivent être remplies :
Les axes de rotation des deux objets connectés doivent se croiser
Le connecteur doit se situer exactement à l'intersection des deux axes de rotation
Le joint universel peut être limité en angle dans les deux axes de rotation.
Rotule
Une articulation à rotule permet une rotation dans les trois dimensions. L'articulation de l'épaule dans le corps humain, par exemple, est une articulation à rotule.
Ragdoll
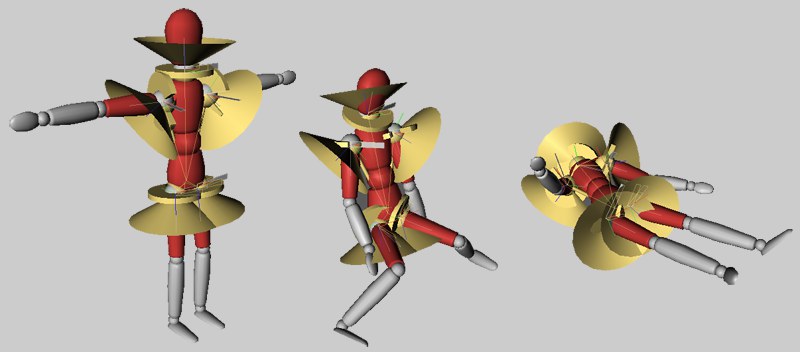
Un connecteur Ragdoll est une articulation à rotule (voir ci-dessus) avec une restriction conique à angle réglable. En outre, il est possible de définir une restriction angulaire de la rotation de l'axe supérieur.
Le terme "ragdoll" reflète l'utilisation prévue du connecteur : par exemple, il peut être utilisé pour certaines articulations humaines telles que l'articulation de la hanche ou de l'épaule :
Le connecteur Ragdoll assure des mouvements articulaires naturels et humains.
Curseur
Un rail limite les directions de mouvement possibles à un seul axe, à savoir l'axe Z du connecteur.
La liberté de mouvement peut être limitée en termes de longueur.
Curseur de torsion
Un rail rotatif limite les directions de mouvement possibles à un seul axe, à savoir l'axe Z du connecteur. Il peut également être tourné autour de l'axe du rail.
La liberté de mouvement peut être limitée en termes de longueur et de rotation.
Planaire
Une surface ne permet que des mouvements dans le plan X-Z du connecteur.
La liberté de mouvement peut être restreinte dans les quatre directions.
Boite
Un parallélépipède permet de se déplacer dans toutes les directions, mais peut être limité dans les six directions.
Suspension de roue
Ce type de produit sort un peu de l'ordinaire. Il permet des mouvements dans la direction Y du connecteur et une rotation autour de l'axe Z du connecteur. Rien d'inhabituel jusqu'à présent. Mais il y a un ressort supplémentaire (le long de l'axe Y du connecteur). Vous pouvez l'utiliser pour créer très facilement et rapidement des constructions de roues dynamiques, élastiques et même orientables, de sorte que rien ne s'oppose à la création de châssis mobiles. Vous trouverez un exemple de scène sous <TEXT_ID TRIGIDBODY-RIGIDBODY_PBD_FRICTION> Friction</TEXT_ID>.
Ignorer les collisions
Cette option ne s'applique qu'aux collisions entre les deux objets reliés par le connecteur. Souvent, au cours de la construction d'une scène, lorsque vous essayez des constructions de connecteurs de base, il serait dérangeant de laisser les requêtes de collision prendre effet.
Sélection
Une propriété Sélection MoGraph avec des connecteurs sélectionnés peut être placée ici. Seuls les connecteurs contenus dans la sélection sont évalués en ce qui concerne les collisions entre les corps rigides liés.
Rayon du cône[0..89°]
Avec le type de connecteurRagdoll, le mouvement peut être limité dans un espace conique. Vous pouvez régler l'ouverture de ce cône ici.
Elipse
Rayon de cône Y[0..89°]
En activant cette option, le cône (parfait) peut être déformé en un cône comprimé. Le rayon du cône Y régule alors la compression.
Angle de direction[-∞..+∞°]
Ce paramètre et les 4 suivants ne s'affichent que lorsque l'on utilise le type desuspension de roue.
L'angle de direction définit l'angle de la roue autour de l'axe Y du connecteur. Si vous animez ce paramètre, vous pouvez simuler le contrôle d'un véhicule réel.
Position de repos de la suspension[-∞..+∞m]
Elle permet de définir la position de repos de la suspension intégrée, à partir de l'origine du connecteur. Les valeurs négatives poussent le véhicule vers le haut.
Dureté de la suspension[0.00..+∞]
La Dureté de la suspension définit l'importance des forces exercées par la suspension lorsque la longueur change par rapport à la phase de repos. Plus une suspension est dure, plus il est difficile de la comprimer ou de l'étendre sur sa longueur (et plus elle oscille rapidement).
Amortissement de la suspension[0..+∞%]
Comme vous le savez avec votre voiture, il n'y a pas de suspension sans amortissement ("amortisseur"). Les vibrations s'atténuent ainsi rapidement et le pneu reste toujours sur la route. Plus l'amortissement de la suspension est important, plus la suspension s'immobilise rapidement.
Rebond[0..+∞%]
Si vous avez défini des limites d'angle avec De ou à, vous pouvez utiliser ce paramètre pour définir le degré de suspension du mouvement lorsque l'objet touche la butée.
Limite inférieure X
De[-∞..+∞m]
Limite supérieure X
A[-∞..+∞m]
Limite inférieure Y
De[-∞..+∞m]
Limite supérieure Y
A[-∞..+∞m]
Limite inférieure Z
De[-∞..+∞m]
Limite supérieure Z
A[-∞..+∞m]
Pour les types de connecteurs qui autorisent le mouvement, celui-ci peut être limité le long des axes et à partir de l'origine du connecteur.
Limite angulaire
Limite angulaire 2
De[-∞..+∞°]
A[-∞..+∞°]
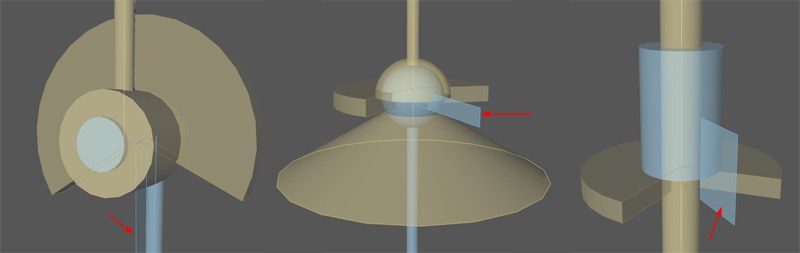
Limites angulaires pour divers connecteurs. Le pointeur d'arrêt marqué par la flèche du milieu ne peut se déplacer qu'à l'intérieur des limites jaunes.
Pour presque tous les types de connecteurs qui autorisent la rotation, vous trouverez des restrictions d'angle que vous pouvez définir à l'aide de ces paramètres.
Si aucune limite d'angle n'est définie, les objets peuvent tourner autour du centre de la charnière un nombre infini de fois en cas de mouvement rotatif (infiniment dans le sens du rail pour les mouvements le long d'un rail).
Veuillez noter que les limites d'angle ne s'appliquent qu'à un tour complet, c'est-à-dire qu'il n'y a pas de restrictions possibles du type "Tourner de 720° et s'arrêter".
Le type de connecteur Cardan, qui permet 2 plans de rotation, peut être limité au moyen de la limite d'angle 2.
Force rupture
Force[0..+∞m]
Couple rupture
Couple[0.00..+∞]
Une valeur limite pour la force et/ou le couple peut être introduite avecTypeFixe. Si la force et/ou le couple agissant sur le connecteur dépasse ces valeurs limites, le connecteur cède et se rompt et se comporte alors comme s'il n'existait plus ou comme s'il était éteint.
Veuillez noter qu'il se peut que vous deviez entrer des valeurs très élevées (cinq à six chiffres sont tout à fait possibles), en fonction de la scène et des forces en présence.
Des valeurs élevées rendent le connecteur plus stable, tandis que des valeurs plus faibles entraînent une rupture plus rapide.
Sélection
Influences
Sélection
Influences
Influences
Sélection
Influences
Influences
Sélection
Influences
Influences
Sélection
Influences
Sélection
Influences
Sélection
Influences
Sélection
Influences
Sélection
Influences
Sélection
Influences
La petite flèche située à gauche de nombreux noms de paramètres peut être utilisée pour afficher des champs de lien extensibles appelés Influence ou Sélection. Les propriétés de sélection MoGraph ou les cartes d'influence MoGraph sont stockées ici - elles peuvent être créées de manière interactive avec Sélection MoGraph ou Pinceau d'Influence MoGraph en peignant sur les connecteurs. Il est également possible de les définir à l'aide de champs.
Cela a l'effet suivant :
Sélection: toujours attribuée à une option. Une propriété de sélection MoGraph définit les connecteurs auxquels l'option s'applique au moyen de la sélection de connecteurs stockée.
Influences: elles sont toujours attribuées à une valeur de paramètre. Cette valeur de paramètre définit une valeur maximale qui sera attribuée à des connecteurs spécifiques par les influences. Si, par exemple, la valeur du paramètre est fixée à 200 cm et qu'une pondération de 0,5 ou 50% est définie, la valeur 100 cm affectera ce connecteur.
Remarque : il est également possible d'inclure des objets individuels dans un objet Fracture, ce qui signifie qu'ils fonctionneront également avec les deux outils mentionnés.
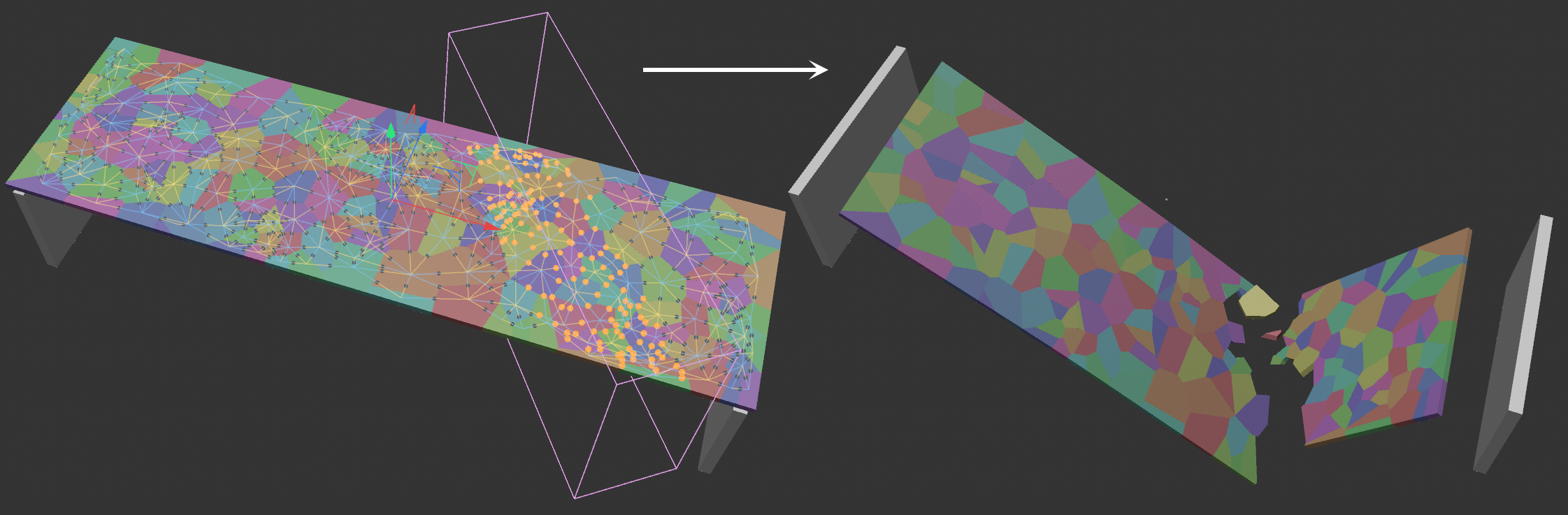
Une propriété de sélection MoGraph (contrôlée par un champ cube) dans le champ de sélection du paramètre Force rupture contrôle le processus de rupture d'un objet de rupture Voronoï.
Objets
Cette liste d'objets contient tous les objets qui sont reliés à des connecteurs. Comment introduire des objets dans la liste ?
Lorsque le connecteur est créé, tous les objets actuellement sélectionnés sont ajoutés à la liste.
Vous pouvez y glisser et déposer des objets.
Pour que les connecteurs fonctionnent correctement, les objets liés doivent être des corps rigides (les corps souples fonctionnent également avec Bullet Dynamics).
Note : Il n'est actuellement pas possible de connecter un connecteur à un autre avec le système Simulation.
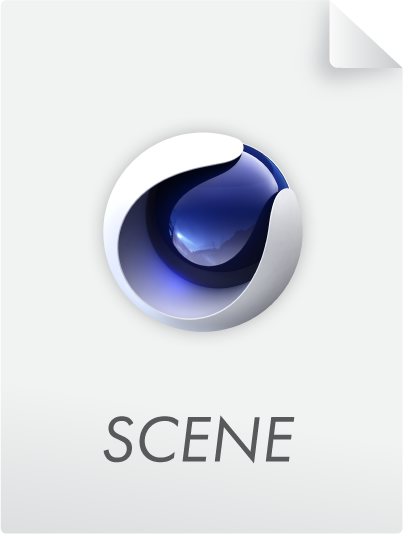
Créer un groupe
Vous avez la possibilité d'utiliser l'icône de dossier pour créer des groupes avec lesquels vous pouvez combiner des éléments. Aucun connecteur ne sera créé à l'intérieur des éléments d'un groupe, mais ils seront créés pour les éléments d'autres groupes - ou les éléments sans groupe.
Les éléments d'un dossier ne sont pas liés à des connecteurs.
Dans l'illustration ci-dessus, les tores doivent être reliés aux cubes opposés. En mode Distance, le tori et le cube sont aussi initialement connectés l'un à l'autre, car ils sont plus proches que leurs homologues. Si vous placez les deux dans leur propre groupe, les connexions ne se feront qu'avec l'autre groupe.
Note : Sélectionnez un élément dans la liste pour trouver des paramètres supplémentaires affichés en dessous de la liste. Certains détails concernant l'application de la force et la fixation des corps rigides peuvent être définis ici.
Créer des paramètres
Ces paramètres - qui ne peuvent être modifiés entre le début et la fin de la simulation - peuvent être utilisés pour contrôler la génération automatique de connecteurs entre les corps rigides de la liste d'objets.
S'il y a un objet Cloneur ici, par exemple, plusieurs milliers de connecteurs peuvent être créés, chacun d'entre eux connectant une paire de corps rigides au milieu.
Note :Si la liste d'objets ne contient que 1 ou 2 corps rigides, les paramètres de création sont grisés, car la création automatique de connecteurs n'est pas nécessaire (il y a alors exactement 1 connecteur par objet connecteur). Cela ne se produit qu'avec 3 objets ou plus
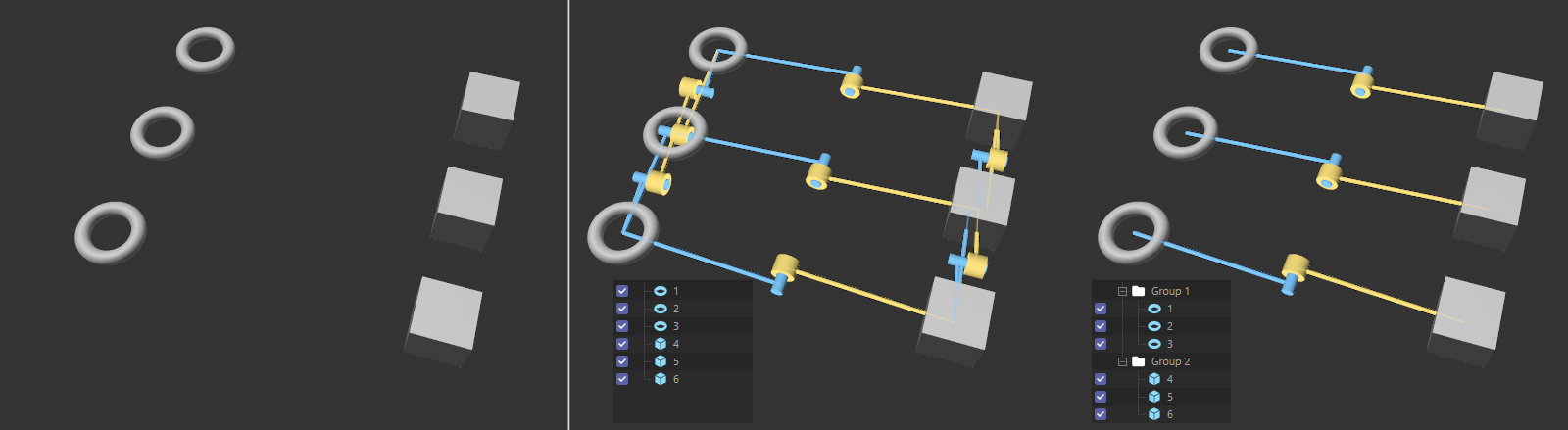
Mode
Un objet Cloneur est utilisé pour créer un mur de briques. Les briques sont connectées comme suit à l'aide de connecteurs : mode index à gauche, distance à droite.
Il existe deux modes de base pour la création de connecteurs, chacun affichant des paramètres différents :
Index
L'ordre des corps rigides est ici déterminant : le corps rigide actuel est toujours relié au suivant. Mais quel est le "prochain" ? Tout simplement : cela est déterminé par l'ordre dans la liste des objets. S'il y a un objet Clone ici : les clones seront numérotés en interne (voir aussi Afficher les Indices). les connecteurs sont alors créés et connectés en conséquence.
Si la liste d'objets contient des objets parents d'autres objets du gestionnaire d'objets, leurs objets enfants seront également pris en compte.
Remarque : un maximum de 2 connecteurs par corps rigide est possible ici : vers le précédent et vers le suivant (bien sûr, rien n'empêche de créer d'autres objets connecteurs, qui à leur tour créent des connecteurs).
Comme vous pouvez le voir dans l'image de gauche ci-dessus, il n'est pas nécessairement logique qu'une tuile de la rangée inférieure soit connectée à une tuile de la rangée supérieure.
La méthode "plus naturelle" est donc la suivante :
Distance
Ce mode relie les corps rigides en fonction de la distance qui les sépare.
Au fur et à mesure que le rayon de recherche augmente, les corps rigides qui sont spatialement proches les uns des autres seront connectés en premier. Ce mode correspond généralement mieux à la réalité que le mode Index. Imaginez un mur de briques : les différentes briques sont reliées à leurs voisines directes par du mortier ; non seulement à la brique précédente/suivante, mais aussi à la brique supérieure/inférieure. C'est exactement la raison d'être du mode à distance : se connecter localement - comme illustré ci-dessus à droite.
Dans ce mode, plusieurs connecteurs peuvent également être connectés à un seul et même corps rigide - contrairement au mode Index, qui autorise un maximum de 2 connecteurs.
Boucle
Cette option, qui n'apparaît qu'en mode index, connecte le premier et le dernier corps rigide de la liste d'objets - s'il y a un objet Cloner, le premier et le dernier clone sont connectés.
Rayon de recherche[-∞..+∞m]
Le rayon de recherche définit la distance d'un corps rigide à l'autre entre les origines desquelles des connecteurs doivent être créés.
La distance est définie d'objet à objet. La règle suivante s'applique donc : la recherche se déroule entre les surfaces, entre les origines.
En cas de divergence, notamment avec des objets très longs et de faible résolution, essayez d'augmenter la résolution du maillage des corps rigides concernés.
Attention aux grands rayons de recherche, qui peuvent rapidement conduire à un grand nombre de connecteurs, ce qui ralentit les calculs de simulation. Le réglage suivant peut y mettre un terme.
Limiter connexions
Max.[1..2147483647]
En fonction du rayon de recherche défini, de très nombreux connecteurs peuvent être créés, car tous les corps rigides situés dans ce rayon seront connectés à tous les autres. Pour limiter le nombre de connecteurs, activez Limiter les connexions et définissez le nombre de connexions à l'aide de Max. des connexions. fixer interactivement une limite supérieure. Veuillez noter qu'il ne s'agit pas d'une valeur absolue, mais d'une limite supérieure. La valeur Max. définit le nombre maximum de connecteurs qui seront utilisés. mais il se peut qu'il y en ait moins, voire pas du tout. Cela se produit, par exemple, lorsque des objets voisins ont déjà atteint leur nombre maximal de connecteurs.
2025
Paramètres de placement
Les connecteurs entre les différents maillons de la chaîne créent une chaîne.
Les paramètres suivants concernent l'emplacement et l'alignement des connecteurs générés automatiquement entre les différents corps rigides. S'il est facile de placer et d'aligner des objets connecteurs de manière interactive, ce n'est pas aussi simple avec les connecteurs générés automatiquement, car ceux-ci sont basés sur les systèmes de coordonnées individuels des partenaires de liaison.
Vous trouverez donc ici un certain nombre de paramètres qui vous aideront à effectuer un placement/alignement automatique.
Position de référence
Décalage[-∞..+∞%]
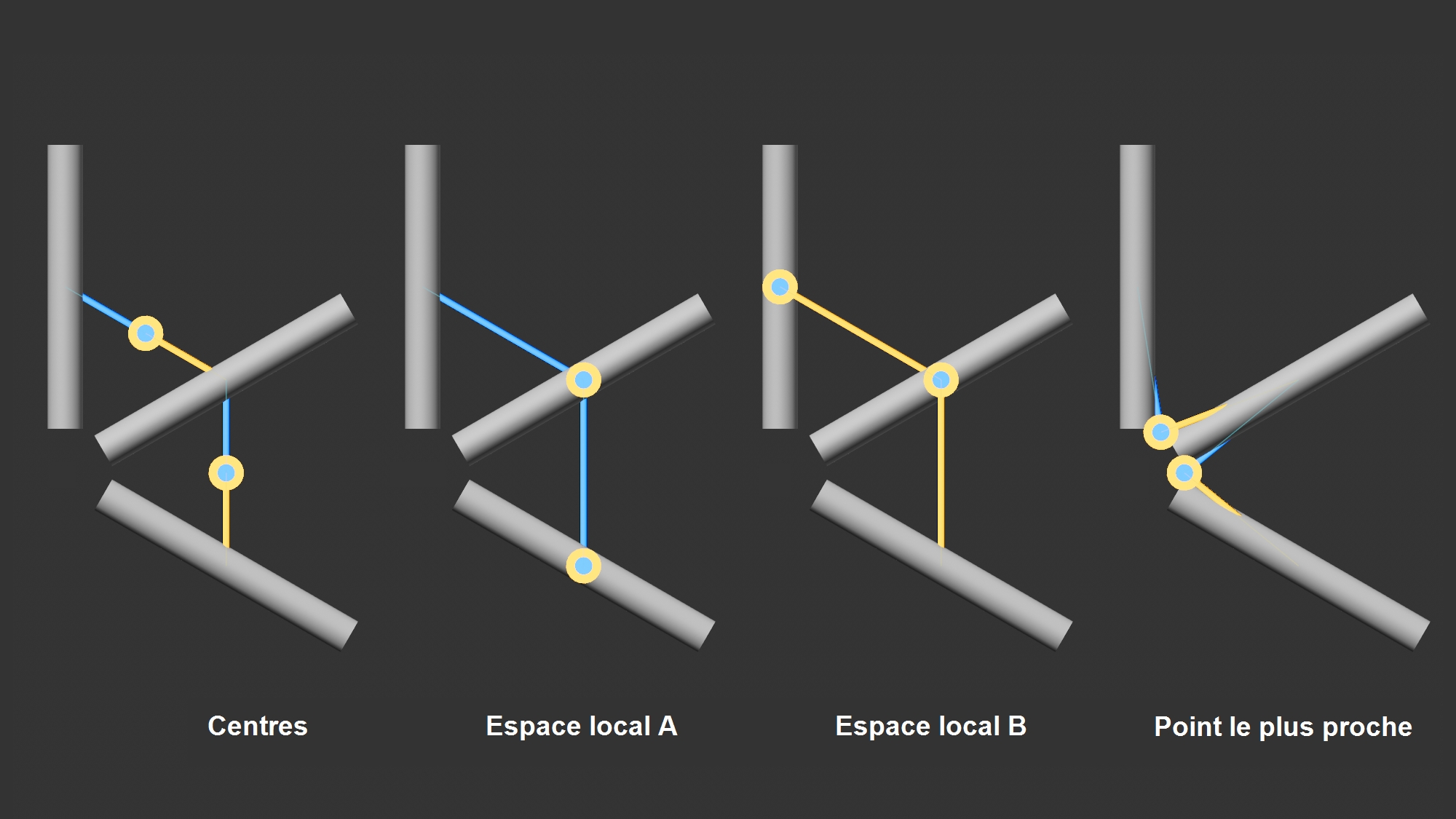
Les modes de position de référence possibles.
Utilisez la fonction Position de référence pour définir l'emplacement des connecteurs respectifs entre les partenaires de liaison A et B.
Vous pouvez choisir parmi les options suivantes :
Centre: le connecteur est placé au milieu entre A et B. Plus précisément : sur une ligne droite formée par les origines de A et B, où vous définissez avec Décalage où exactement sur cette ligne droite (50% correspond exactement au centre).
Espace local A/B: le système de coordonnées du partenaire de liaison A ou B est utilisé ici. Le connecteur peut être positionné librement à l'aide de la fonction Décalage et de ses paramètresX, Y et Z .
Point plus proches : nous essayons ici de trouver la distance la plus courte entre les surfaces A et B. Le connecteur est placé sur cette ligne droite, en tenant compte du décalage(50% centre, 0%/100% surface A/B).
Note :Cette fonction est moins précise avec les objets à résolution très grossière qu'avec les objets à résolution fine ; elle peut donc aider à subdiviser plus fortement les partenaires de collision en cas d'imprécision.
Orientation
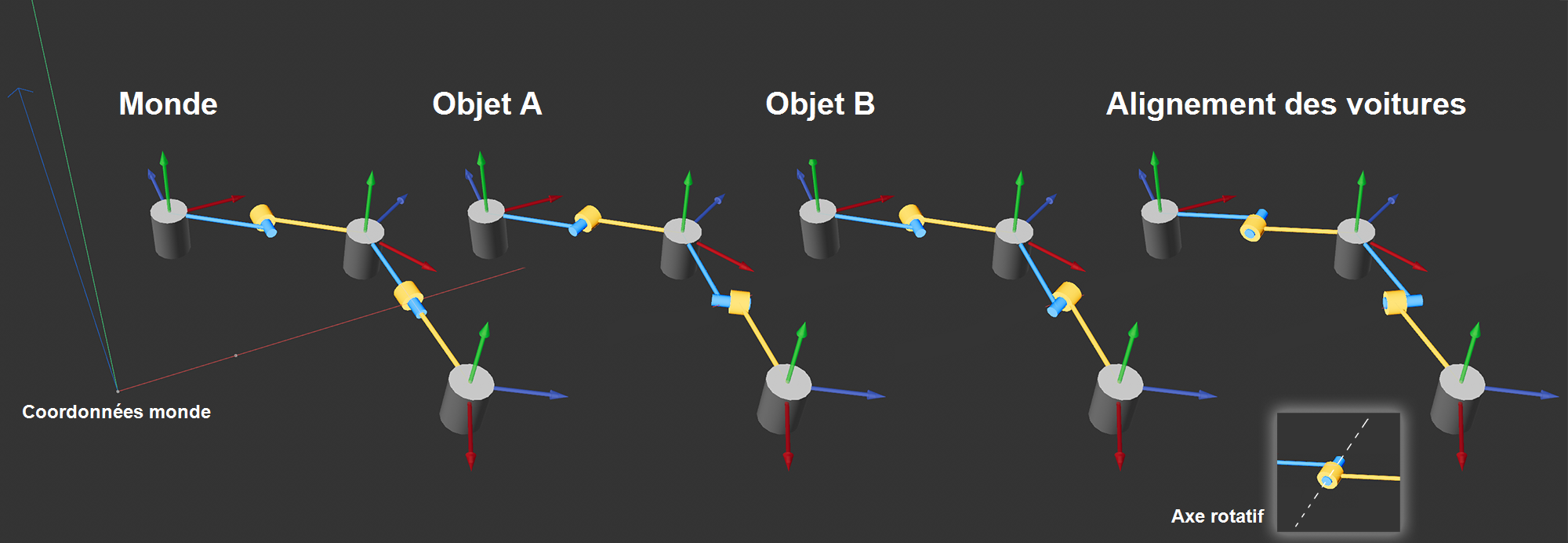
Vous pouvez voir ici comment les axes rotatifs du connecteur sont alignés dans les différents modes.
L'orientation permet de définir l'orientation des connecteurs entre les partenaires de liaison A et B. Ceci est particulièrement important pour les charnières, car cela détermine l'axe de rotation. Pour les charnières, l'axe de rotation est toujours l'axe Z du connecteur.
Vous pouvez choisir entre :
Monde: les connecteurs sont orientés avec leur axe Z vers l'axe Z du monde.
Objet A/B: les connecteurs tournent avec leurs axes Z dans la direction des axes Z de l'objet A ou de l'objet B.
Alignement automatique: les connecteurs s'alignent de manière à ce que leurs axes Z soient perpendiculaires à la connexion des centres de masse des deux corps rigides concernés.
A noter également :
L'objet connecteur peut être déplacé et tourné, ce qui signifie que les connecteurs individuels qu'il contient peuvent également être déplacés/rotés autour de leur axe individuel.
L'objet connecteur peut être rendu modifiable en appuyant sur la touche C, ce qui vous permet d'accéder directement aux propriétés de chaque connecteur.
Création auto
Si l'option Création automatique est activée, les connecteurs sont créés "en direct" lorsque les paramètres de création sont modifiés. Cela peut s'avérer très difficile avec un grand nombre de connecteurs. Dans ce cas, désactivez l'option et créez et supprimez des connecteurs d'un clic de souris en utilisant les boutons du même nom.
Remarque : il est actuellement conseillé de laisser la fonction de création automatique activée si vous souhaitez modifier les paramètres du connecteur (par exemple, Ignorer les collisions, Force, etc.) après la génération. Vous pouvez également cliquer sur Créer après avoir modifié les paramètres.
Créer
Créer déclenche toujours une nouvelle création des connecteurs, en tenant compte de tous les paramètres.
Effacer
Cette opération supprime tous les connecteurs créés automatiquement. L'objet connecteur sera conservé.
 Les différents connecteurs. Le mode fixe n'est pas affiché.
Les différents connecteurs. Le mode fixe n'est pas affiché.
 Le connecteur Ragdoll assure des mouvements articulaires naturels et humains.
Le connecteur Ragdoll assure des mouvements articulaires naturels et humains.
 Limites angulaires pour divers connecteurs. Le pointeur d'arrêt marqué par la flèche du milieu ne peut se déplacer qu'à l'intérieur des limites jaunes.
Limites angulaires pour divers connecteurs. Le pointeur d'arrêt marqué par la flèche du milieu ne peut se déplacer qu'à l'intérieur des limites jaunes.