Moteur
![]()
Un moteur est un élément de simulation qui agit sur les corps rigides dans le système Simulate - ou sur les corps souples dans le cas de Bullet dynamics - et applique une force ou un couple permanent.
Un moteur peut donc être utilisé pour entraîner les roues d'un véhicule, un tapis roulant, etc.
Contrairement à son angle, la position d'un moteur n'est pas pertinente. L'angle détermine la direction de l'axe de la force ou du couple. Les deux sont affichés dans la fenêtre de visualisation par une visualisation du moteur.
Si nécessaire, affectez le moteur à un objet afin qu'il s'aligne en conséquence (dans le cas d'un modèle de voiture, par exemple, au châssis), comme le montre l'exemple suivant (voir également Position du connecteur).
Exemple 1
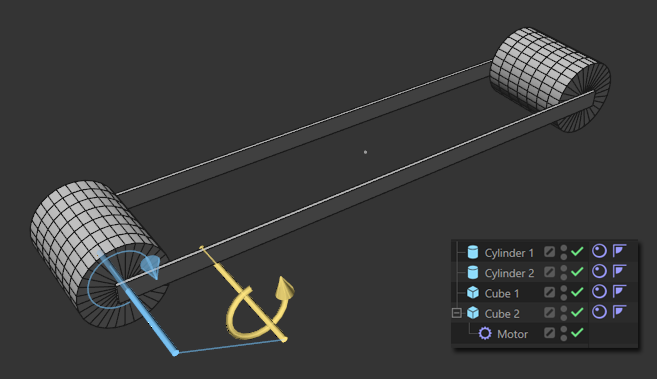 La position du moteur n'a pas d'importance, mais l'axe de rotation du moteur doit être parallèle à l'axe de rotation de la roue. Les connecteurs nécessaires ne sont pas illustrés ici.
La position du moteur n'a pas d'importance, mais l'axe de rotation du moteur doit être parallèle à l'axe de rotation de la roue. Les connecteurs nécessaires ne sont pas illustrés ici.
Lorsque vous utilisez des moteurs, veillez à ce que les objets entraînés soient attachés au reste de la géométrie à l'aide d'un connecteur( mode charnière) afin que les forces générées puissent leur être transférées. Dans l'exemple ci-dessus, le véhicule roule de manière autonome au-dessus d'un paysage.
Exemple 2
Dans cette scène, les boules roulent sur un rail et entrent dans le champ d'action d'un champ de cubes, qui régule à son tour un moteur linéaire pour soulever les boules vers le haut. Un nœud d'Atténuatiuon XPresso vérifie si les balles sont dans le champ.