Connecteur
![]()
 La rupture des connecteurs de type "solide" garantit que tout ne se désagrège pas, mais seulement les connecteurs les plus sollicités : très pratique pour les parties de débris encore connectées.
La rupture des connecteurs de type "solide" garantit que tout ne se désagrège pas, mais seulement les connecteurs les plus sollicités : très pratique pour les parties de débris encore connectées.
Qu'est-ce qu'un connecteur ?
Les connecteurs limitent les mouvements/rotations des corps rigides et des corps souples (ces derniers uniquement lors de l'utilisation de Bullet).
Les connecteurs relient les objets du type suivant :
- Corps rigides.
- Corps souples (uniquement en liaison avec Bullet Dynamics).
Les connecteurs collaborent donc avec les deux :
- L'ancien système Bullet Dynamics, par lequel les connecteurs des anciennes scènes sont convertis en nouveaux connecteurs.
- Le nouveau système Simulation.
Sans connecteurs, les corps rigides et mous ne réagiraient qu'aux forces et aux collisions. Par exemple, la création d'une simple charnière de porte prendrait beaucoup de temps. Avec un connecteur (angulaire Type, mode charnière), cela est toutefois possible sans problème.
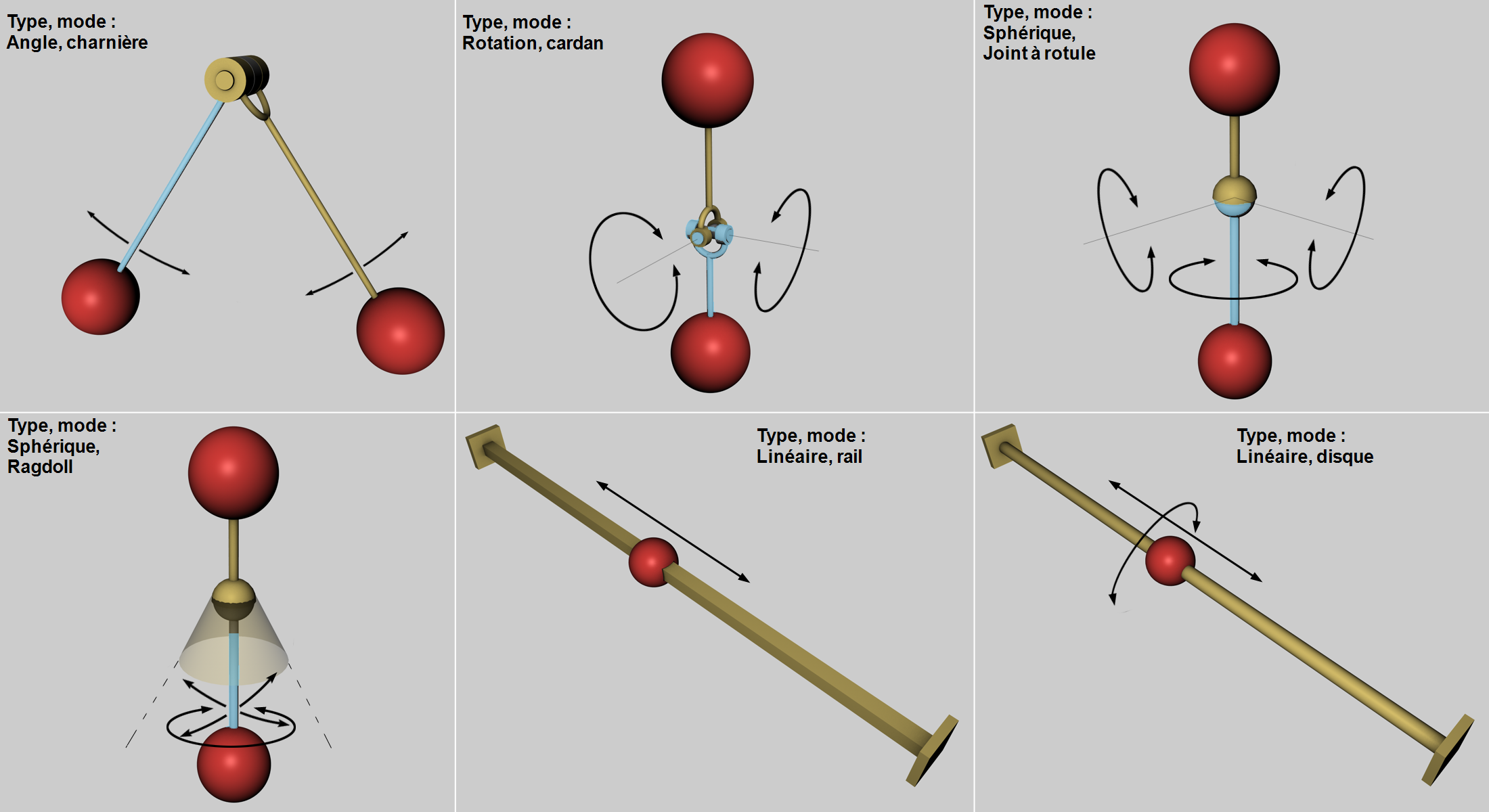 Quelques types de connecteurs. Les flèches indiquent les directions possibles de mouvement et de rotation. Les modes de suspension Planaire, Cubique et Roue, qui ne sont pas illustrés, sont essentiellement des combinaisons des modes précédents.
Quelques types de connecteurs. Les flèches indiquent les directions possibles de mouvement et de rotation. Les modes de suspension Planaire, Cubique et Roue, qui ne sont pas illustrés, sont essentiellement des combinaisons des modes précédents.
Les connecteurs de type fixe sont particulièrement importants. Ils ne permettent aucun mouvement relatif, mais se contentent de maintenir les corps rigides ensemble. L'astuce réside dans le fait que si des forces définies sont dépassées, celles-ci peuvent se rompre, entraînant la rupture de l'objet (voir également ci-dessus).
Les connecteurs sont affichés dans la fenêtre de visualisation avec un aperçu fonctionnel afin que les restrictions puissent être comprises visuellement d'un seul coup d'œil.
Les connecteurs qui ne fonctionnent pas seront affichés en rouge au début de la simulation. Cela peut se produire, par exemple, si les deux partenaires liés ne sont pas des corps rigides.
Créer des connecteurs de manière interactive
Les connecteurs peuvent déjà être créés avec des objets sans propriété "corps rigide". Cependant, elles ne fonctionnent correctement que si des propriétés "corps rigides" ont été attribuées.
-
Sélectionnez les objets à lier dans le gestionnaire d'objets.
-
Appelez l'un des connecteurs dans le menu principal sous .
-
Faites glisser ou pivoter le connecteur dans la fenêtre d'affichage jusqu'à la position correcte (à l'emplacement d'une charnière ou parallèlement à l'axe d'un curseur).
Veuillez noter que les objets Connecteur eux-mêmes ne peuvent pas être clonés. Le clonage de configurations complètes (par exemple, un véhicule comme dans l'exemple ci-dessous pour créer des véhicules autonomes) n'est pas possible avec le système Simulation - mais il est possible avec Bullet Dynamics.
L'objet Connecteur en tant que conteneur pour d'autres connecteurs
L'objet Connecteur est alors une sorte de conteneur pour de nombreux connecteurs individuels.
Bien entendu, il serait intéressant d'attribuer à ces nombreux connecteurs des propriétés individuelles. Par exemple, ce connecteur spécial devrait être le premier à se rompre. Il existe deux solutions à ce problème :
-
Pour les paramètres les plus importants du connecteur, il existe des champs de lien ( appelés sélection ou Influence) dans lesquels les propriétés de sélection MoGraph ou les cartes d'influence MoGraph peuvent être placées (voir également ici), qui contrôlent les propriétés correspondantes au niveau du connecteur.
-
L'objet Connecteur peut être résolu en le rendant modifiable( touche C). Tous les connecteurs contenus sont alors regroupés dans un objet Connecteur sous un objet null. Ceux-ci ne contiennent jamais que deux objets exactement dans leur liste d'objets. Vous pouvez ensuite utiliser cette méthode pour accéder aux paramètres de chaque connecteur individuel.
Position du connecteur
La position et l'orientation du connecteur sont importantes. Ils définissent les axes de mouvement et de rotation. Si vous regardez l'image ci-dessus, par exemple, les sens de rotation possibles des billes sur la charnière sont définis par la position de l'articulation, tout comme la position du connecteur de rail définit la direction dans laquelle la bille peut se déplacer.
La charnière est généralement positionnée sur un axe de rotation.
Une fois que la simulation a commencé, les connecteurs se déplacent automatiquement avec leurs partenaires de liaison de manière significative. L'objet Connecteur n'a donc pas besoin d'être placé quelque part dans la hiérarchie pour fonctionner.
Considérons la scène simple suivante : 2 cylindres, 2 cubes, chacun avec une propriété Corps rigide (vous pouvez télécharger la scène finie ci-dessous) :
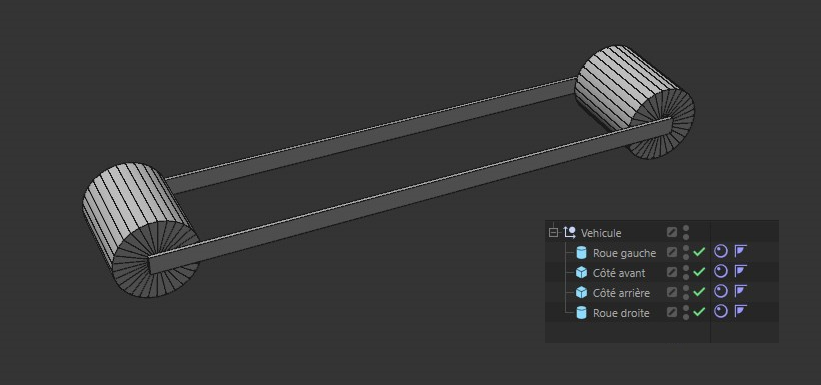
Ces 4 objets de base doivent être transformés en un véhicule fonctionnel.
Sans connecteurs, ces 4 composants tomberont simplement sans interagir les uns avec les autres - à l'exception d'éventuelles collisions. Pour transformer les pièces en un véhicule fonctionnel, vous avez besoin de 4 connecteurs de type angulaire, mode charnière, qui relient les 2 cubes aux axes de rotation des cylindres.
Pour ce faire, sélectionnez les deux objets à relier et créez un connecteur angulaire. Ces objets sont donc reliés par un connecteur.
L'astuce consiste à placer deux connecteurs dans l'axe de rotation du premier cylindre et les deux autres dans l'axe de rotation du deuxième cylindre. L'emplacement des connecteurs sur l'axe de rotation n'a pas d'importance. Ceux-ci peuvent être déplacés axialement sans perturber la fonctionnalité. Bien entendu, il est plus logique de les déplacer vers leur position "réelle", qui dans ce cas serait les paliers, c'est-à-dire l'endroit où les "interfaces" entre les objets en rotation sont situées dans la réalité :

Vous avez ainsi déjà créé un véhicule fonctionnel qui peut rouler de manière autonome sur un plan incliné. Les 4 objets forment un groupe fixe avec des cylindres rotatifs.
Positionnement automatique
Ces règles s'appliquent lors de la création de nouveaux objets ou connecteurs :
-
S'il n'y a qu'un seul objet dans la liste des objets, le connecteur nouvellement créé se trouve à l'origine du monde. L'objet est donc initialement relié au centre du monde - l'objet Connecteur peut ensuite être librement positionné/rotationné.
-
S'il y a deux objets dans la liste d'objets, le connecteur sera également créé à l'origine du monde, mais il reliera les deux objets - l'objet connecteur peut alors, bien sûr, être positionné/rotationné librement.
-
S'il y a 3 objets ou plus dans la liste d'objets - y compris les clones des objets Cloneur - les connecteurs seront positionnés au milieu des paires d'objets connectés. Si vous faites pivoter ou déplacez l'objet Connecteur, tous les Connecteurs qu'il contient seront déplacés ou pivotés en conséquence.
Connecteurs imprécis ?
Si vous avez l'impression que les connecteurs ne remplissent pas leur fonction à 100 %, c'est-à-dire qu'ils cèdent ou rebondissent trop, il est généralement utile de se concentrer sur la précision du calcul de simulation (principalement représentée par les paramètres Sous-étapes et Itérations).
Une autre raison pourrait être les différences extrêmement importantes entre les masses des objets. Les simulations de physique n'aiment généralement pas beaucoup cela.
5 commandes de connecteurs, mais seulement 1 jour ?
Même si vous pouvez appeler 4 types de connecteurs différents sous , il ne s'agira que d'un seul objet connecteur avec des paramètres de type ou de mode différents. Ceux-ci peuvent être modifiés à tout moment.
Autres faits intéressants
-
Si les simulations de nombreux objets sont trop similaires, l'objet
 Turbulence peut apporter un remède, par exemple en créant un peu de désordre dans une collection de clones.
Turbulence peut apporter un remède, par exemple en créant un peu de désordre dans une collection de clones. -
Voulez-vous construire des murs et des tours qui s'effondreront ? Pour éviter l'effet de ressort lors de la définition des corps rigides au début de la simulation, Déclencher Sur collision peut être défini. Des valeurs plus élevées pour Sous-étapes permettent également d'éviter des connecteurs fixes trop "élastiques".
-
Pour illustrer cela, vous trouverez dans la scène suivante quelques types de connecteurs, y compris des corps rigides en mouvement :
