Dynamiques
Si la propriété a été attribuée à l'un des objets générateurs de clones (par exemple, l'objet Cloneur, l'objet Fracture Voronoi, etc.), une sélection MoGraph peut être utilisée pour exclure des clones individuels de l'attribution du corps rigide. Cependant, ils fonctionnent toujours comme des objets de collision.
Vous pouvez définir ici le point de départ de la simulation pour le corps rigide correspondant. Sinon, il restera à sa position de départ.
Dès que la simulation commence à fonctionner, elle prend le contrôle de l'objet. Toutes les animations des corps rigides sont désactivées (exception : vous travaillez avec la conserver la position/rotation (onglet "Forces")).
Vous pouvez choisir parmi les options suivantes :
- Immédiatement: la simulation commence immédiatement.
- Sur collision: la simulation ne démarre que lorsque l'objet correspondant est touché par un autre objet de simulation avec une vitesse minimale définissable (seuil de vélocité de déclencheur).
- Au pic de vélocité : ce mode s'applique aux corps rigides animés. Dès que le premier pic de vitesse est atteint (qu'il soit linéaire ou sous forme de rotation), l'animation s'arrête et la simulation est activée. La vitesse actuelle sera intégrée dans la simulation. Une transition sans étape aura lieu.
Pour une animation normale de A à B, l'interpolation Spline par défaut garantit automatiquement que l'animation commencera au centre de la piste d'animation.
Seuil de vélocité du déclencheur[0..+∞m]
Si vous avez activé l'option Sur collision sous Déclencher, vous pouvez sélectionner ici une vitesse minimale à laquelle la collision doit se produire avant qu'elle n'ait lieu.
Ces trois paramètres sont ensuite affichés lorsque la génération du corps rigide est prise en charge par le système de particules, car certaines propriétés des particules - vitesses et alignements - peuvent alors être prises en charge directement.
Dans l'exemple suivant, les corps rigides héritent des vitesses des particules de l'émetteur en orbite.
Activez l'option correspondante si la propriété de particule doit être appliquée au moment de la création. Notez que la trajectoire de la nouvelle particule n'a plus d'influence sur les corps rigides. Seules les propriétés des particules sont déterminantes pour la génération de particules/corps rigides.
La balise Rigid Body doit être attribuée à un objet clone, qui crée à son tour un Corps rigide en mode Objet sur chaque particule nouvellement créée dans le groupe de particules.
Vélocité initiale personnalisée
Activez cette option si, au moment où la simulation démarre (voir Déclenchement), le corps rigide doit avoir une vitesse librement définissable. Par exemple, dès qu'un corps rigide est touché par un autre objet de simulation, il peut être repoussé à grande vitesse.
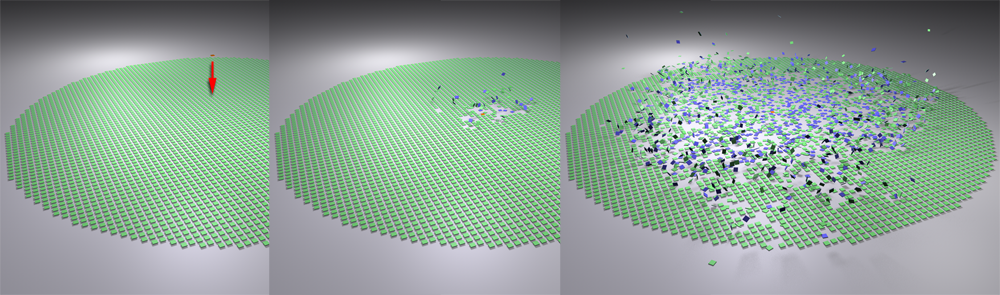
Cela permet de créer des réactions en chaîne intéressantes, par exemple. Ceci est similaire aux expériences bien connues de la souricière. Dans la scène suivante, chaque corps rigide a été doté d'une vitesse de départ dans la direction Y (vers le haut). Déclencher est réglé sur Collision.
Si vous déposez maintenant un autre corps rigide au milieu, par exemple, la réaction en chaîne suivra son cours.
La direction de la vitesse qui peut être définie sous Direction doit-elle être basée sur le système de coordonnées de l'objet du corps rigide (activé) ou sur le système de coordonnées du monde (désactivé) Vous pouvez le définir ici.
La direction de la vitesse de démarrage peut être saisie sous forme de vecteur. Si cela doit se faire vers le haut, définissez par exemple 0, 1, 0.
Indiquez ici la vitesse de démarrage. Il s'agit de centimètres par seconde. La direction de la vitesse est indiquée dans la fenêtre de visualisation par une ligne jaune.
Sous Direction, la direction de la vitesse de démarrage peut être définie au moyen d'un vecteur. L'utilisation de la position de l'objet est une méthode plus simple. Il suffit de faire glisser un objet dans cette zone pour que la direction de la vitesse de démarrage s'aligne automatiquement sur l'origine de l'objet.
Vélocité angulaire initiale personnalisée
Entrez ici les vitesses de rotation éventuelles lorsque vous utilisez la simulation avec les axes H, P et B. L'axe de rotation est indiqué dans la fenêtre de visualisation par une ligne violette.
L'axe de rotation qui peut être défini sous Axes doit-il être basé sur le système de coordonnées de l'objet du corps rigide (activé) ou sur le système de coordonnées du monde (désactivé) Vous pouvez le définir ici.
Définissez ici un vecteur comme axe de rotation. Il y a 3 champs, respectivement pour les axes X, Y et Z. Si vous souhaitez effectuer une rotation autour de l'axe Y, entrez 0,1,0.
Entrez ici la vitesse de rotation en degrés par seconde.
Si vous avez défini une vitesse angulaire initiale personnalisée, l'axe de rotation sera affiché en violet. Dès que la simulation commence, elle est cachée.
L'affichage de cet aperçu peut être activé ou désactivé ici.

Vous trouverez ci-dessous un certain nombre de paramètres que vous pouvez utiliser pour mettre les corps rigides en sommeil. Cela permet principalement d'optimiser le temps de calcul.
Seuil de vélocité linéaire[0..+∞m]
Seuil de vélocité angulaire[0..+∞°]
Les corps rigides seront désactivés dès que leur vitesse sera inférieure à ces seuils pendant un certain temps - tel que défini dans la rubrique Temps. Ils le resteront jusqu'à ce que d'autres objets de simulation entrent en collision avec eux. Les corps rigides sortent alors de leur sommeil et obéissent à la simulation jusqu'à ce qu'ils retombent en dessous des vitesses seuils pendant un certain temps.
Notez que les deux seuils doivent toujours être dépassés pour désactiver le corps rigide. Par exemple, si vous mettez l'un d'eux à "0" (et donc désactivez ce seuil), il ne sera jamais désactivé.
Exemple: si vous laissez tomber un cube sur un plan incliné, il peut en principe se produire un micro-glissement, c'est-à-dire que le cube glisse très lentement vers le bas. Les seuils de vitesse permettent de désactiver cet effet.
Dès que les corps rigides se sont "endormis" (voir aussi les 3 paramètres précédents), ils peuvent être réveillés par des collisions, par exemple. Pour savoir si les corps rigides sont endormis, cliquez ici. De petites valeurs les font se réveiller immédiatement, tandis que des valeurs de plus en plus grandes rendent les corps rigides de plus en plus têtus, jusqu'à ce qu'ils ne se réveillent plus du tout et ne bougent plus.
Ce paramètre est lié au seuil de vitesse linéaire (d'où l'unité de Pourcentage), à savoir à 100 %, un corps rigide endormi devrait atteindre cette vitesse lors d'une collision pour se réveiller.
Des valeurs supérieures à 100 % sont possibles.
Si les valeurs sont inférieures aux deux seuils décrits ci-dessus, les corps rigides peuvent être mis en sommeil après un certain temps. Ce temps peut être défini ici en secondes. Si vous souhaitez que cela se produise le plus rapidement possible, définissez ici de petites valeurs allant jusqu'à 0 (= immédiatement).
Atténuation
Vous pouvez déjà trouver un réglage d'atténuation dans les paramètres du projet (Atténuation), mais il s'applique à l'ensemble de la scène.
Activez cette option si vous souhaitez définir d'atténuation au niveau de la propriété ou de l'objet. Dans le cas contraire, c'est l'atténuation globale qui s'applique (voir paragraphe précédent).
L'atténuation n'est rien d'autre qu'une élimination artificielle de l'énergie cinétique d'une simulation, tant en ce qui concerne les mouvements linéaires (linéaires) que les mouvements de rotation (angulaires).
Avec des valeurs de plus en plus grandes, les corps rigides se comporteront de plus en plus comme s'ils se déplaçaient dans des milieux de plus en plus visqueux (par exemple, air -> eau -> miel, etc.).
Des valeurs supérieures à 100 % sont possibles.
En général, l'atténuation est utilisé pour ralentir les simulations trop volatiles et erratiques qui ont tendance à exploser et devenir contrôlables. Les simulations qui ne s'arrêtent pas correctement ou seulement lentement peuvent également être amenées plus rapidement à un état de repos final.
L'application de valeurs d'atténuation extrêmement élevées peut également être utilisée pour arrêter une simulation presque instantanément. Mais attention : les forces qui continuent d'agir - par exemple la gravité - feront ramper lentement les corps rigides.
Normalement, l'image d'animation 0 définit l'état de la scène à partir duquel la simulation commence. Il arrive souvent que l'on veuille utiliser un état avancé de la simulation comme futur état de départ. Imaginez une pile de cubes que vous voulez étaler sur le sol. Tout d'abord, démarrez la simulation, laissez tomber les dés sur le sol, puis cliquez sur Définir. Cela définit les cubes sur le sol comme l'état de départ.
Les positions de départ originales seront toujours sauvegardées en interne, car les corps rigides seront réinitialisés à ces positions lorsque vous cliquerez sur Supprimer.
Lorsque vous cliquez sur Définir, cette option détermine si la vitesse actuelle du corps rigide doit également être sauvegardée dans l'état initial.. Dans le cas contraire, la simulation démarre à la vitesse 0 ou avec les vitesses de démarrage définies ci-dessus.