Simulation
La plupart des paramètres suivants peuvent être animés. Il est ainsi possible d'adapter les paramètres aux différentes phases de la simulation. Vous pouvez, par exemple, augmenter les paramètres gourmands en calcul tels que Sous-étapes ou Itérations si cela est vraiment nécessaire et, par exemple, dans les phases dans lesquelles aucune collision n'a lieu, ces valeurs peuvent être abaissées afin d'accélérer la simulation.
Ce paramètre est crucial pour la précision de la simulation. Plus la valeur est élevée, plus le calcul sera précis et plus la détection des collisions sera précise (avec des temps de calcul correspondants plus longs).
Chaque image d'animation est divisée temporellement en interne avec les Sous-étapes spécifiées ici. Un algorithme de simulation (calcul de l'effet des contraintes, de la position et de la vitesse des objets, etc.
En particulier dans le cas de pénétrations à grande vitesse, vous devez augmenter cette valeur. Imaginez un objet se déplaçant à grande vitesse qui entre en collision avec un tissu suspendu. Supposons que l'objet se trouve à gauche du tissu à l'image 12 et à sa droite à l'image 13. Cinema 4D ne détectait pas de collision (si sous-étapes est réglé sur 1). Avec plusieurs Sous-étapes qui, par exemple, calculent les images "12.2" et "12.3", la collision serait détectée et calculée correctement.
C'est un inconvénient : les sous-étapes (et les itérations) ont une influence sur la rigidité des objets tissu à simuler. Plus le nombre de sous-étapes/itérations est élevé, plus le tissu sera rigide (c'est-à-dire que la Flexibilité/étirement sera plus précise).
En d'autres termes, l'application d'un grand nombre de sous-étapes et d'itérations produira un résultat plus réaliste. Le plus souvent, ces valeurs doivent rester faibles pour que la vitesse de calcul reste gérable. Cela signifie que le solveur, qui doit tenir compte d'innombrables contraintes, prend des raccourcis et s'écarte d'un résultat réaliste. Ces écarts se traduisent principalement par un manque de rigidité (comportement caoutchouteux) mais aussi, dans certains cas, par des collisions imprécises, etc.
Notez que des valeurs très élevées (par exemple, 200) peuvent entraîner un comportement paradoxal : au lieu d'augmenter la précision, elle diminue. La raison en est la précision 32 bits du GPU. Essayez plutôt d'augmenter le paramètre Iteration puis celui de sous-étapes. Consultez également la rubrique Conseils et astuces pour connaître les mesures supplémentaires qui peuvent être prises.
En interne, on utilise un algorithme itératif qui s'approche le plus possible du résultat final mathématiquement ( !) optimal (= toutes les contraintes sont respectées). Les itérations définissent la fréquence à laquelle les nombreuses contraintes sont calculées par Sous-étape.
L'impact pratique, par exemple, sur le comportement des vêtements est le suivant : le tissu devient plus rigide - parce que les contraintes tiennent mieux.
Des valeurs plus élevées peuvent aider à éviter le tremblement de points.
Voir également le paramètre précédent sous-étapes, les deux paramètres sont étroitement liés et ont des effets similaires.
Si vous définissez Iterations à 0, un solveur différent est utilisé en interne, qui converge plus lentement que le solveur standard, c'est-à-dire qu'au sens figuré, il traite les contraintes de manière un peu plus lâche. Le nombre de lissage d'itérations sera fixé à 1.
Cela vous permet d'obtenir une plus grande robustesse et homogénéité de la simulation. Cependant, le tissu et les cordes seront alors plus extensibles.
En particulier dans les simulations comportant de nombreuses contraintes qui s'opposent parfois les unes aux autres - par exemple, la contrainte A veut déplacer un point vers la gauche, la contrainte B vers la droite - cela peut entraîner une instabilité des points (voir également le paragraphe suivant). Dans ce cas, l'autre solveur peut produire de meilleurs résultats.
Pour compenser l'élasticité plus grande et plus caoutchouteuse, il est recommandé d'augmenter les Sous-étapes.
Éviter les tremblements.
Les deux paramètres suivants sont principalement utilisés pour réduire les tremblements qui se produisent dans les petites zones.
En général, elle peut également contribuer à réduire les sous-étapes et à augmenter les itérations.
Les calculs internes des points dus aux diverses contraintes qui les "tiraillent" peuvent donner lieu à de grands écarts de points, ce qui peut donner l'impression que des impulsions supplémentaires et soudaines se produisent.
Si le nombre de lissage d'itérations est supérieur à 0, des calculs de moyenne supplémentaires sont effectués, ce qui fait perdre son effet, c'est-à-dire qu'il y a moins de tremblement.
N'utilisez ce paramètre que si cela est nécessaire, car il peut entraîner des effets secondaires tels que la modification de la rigidité.
Grâce à ce paramètre, la vitesse / l'énergie peut être retirée du système. Des valeurs plus petites, jusqu'à 3 %, sont recommandées. Des valeurs plus élevées donneront à la simulation un aspect plus proche de celui de l'eau.
Les simulations ont tendance à "exploser" de temps en temps, cela peut être contré en augmentant soigneusement cette valeur.
Vous pouvez également définir des valeurs d'amortissement - ici aussi séparément pour les mouvements linéaires et rotatifs - au niveau de la propriété correspondante (par exemple Substitution).
Ces deux paramètres sont principalement utilisés pour éviter des états de simulation instables - qui pourraient aboutir à un gel de la simulation. Les vitesses ou accélérations excessivement élevées (toutes deux au niveau du point) sont limitées. Cela permet de réduire les collisions et d'éviter les pénétrations qui, autrement, nécessiteraient des valeurs prohibitives pour les paramètres Passes et/ou Sous-étapes pour obtenir le même effet.
Il faut également mentionner un effet appelé "TDR (Timeout Detection & Recovery)", un mécanisme de protection du système d'exploitation qui arrête la simulation avec un message d'erreur lorsque la carte graphique est surchargée. Cet effet peut également être réduit par les deux réglages.
Ces deux méthodes présentent l'inconvénient de rendre la simulation plus stable, mais au détriment du réalisme, car toute la simulation est amortie.
Alors utilisez :
-
Limite de vélocité: ce mode est approprié lorsque les objets se déplacent simplement à des vitesses très élevées sans accélération (ou seulement de faibles accélérations).
-
Limite accélération: s'il y a des pénétrations dans les collisions, qui peuvent ressembler à des sauts de points soudains (= forte accélération) à cet endroit, cette option est le bon choix.
Notez la différence fondamentale entre le blocage de la vitesse et l'accélération : dans le premier cas, la vitesse est effectivement limitée, alors que dans le second, bien qu'il n'y ait pas de croissance de l'accélération, il peut toujours y avoir une croissance de la vitesse (tant qu'il y a une accélération - positive -, tant que la vitesse croît).
Pour la Limite de vélocité : vous avez les options suivantes :
-
Désactivé: Aucune vitesse n'est fixée.
-
Échelle de scène: la vitesse est limitée à une valeur d'accélération en pourcentage qui dépend de la boîte englobante du plus grand objet présent dans la scène. La vélocité est appliquée globalement.
-
Absolue: la vitesse est limitée à la vitesse absolue du point. La vélocité est appliquée globalement.
-
Rayon de collision: il s'agit d'une valeur en pourcentage de la vitesse qui dépend du rayon de collision respectif (épaisseur ou rayon) autour de chaque point. Comme l'épaisseur dépend de la densité du maillage d'une part et peut être contrôlée via une carte d'influence de points d'autre part, la vélocité par point peut différer. Cela signifie que la vitesse pour les très faibles épaisseurs est plafonnée localement plus fortement.
Ce n'est pas si facile à comprendre. En principe, vous définissez la vitesse maximale autorisée qui dépend de certains facteurs.
De la boîte englobante
Définissez ici la vitesse maximale autorisée si vous avez défini l'échelle de scène ci-dessus.
Taille
Définissez ici la vitesse maximale autorisée si vous avez défini Absolu ci-dessus.
Rayon
Vous pouvez définir ici la vitesse maximale autorisée si vous avez défini le rayon de collision ci-dessus.
Pour la Limite de vélocité : vous avez les options suivantes :
-
Désactivé : Aucune accélération n'est limitée.
-
Échelle scène: la vitesse est limitée à une valeur d'accélération en pourcentage qui dépend de la boîte englobante du plus grand objet présent dans la scène.
De la boîte englobante
Vous pouvez définir ici l'accélération maximale autorisée si vous avez défini l'échelle de scène ci-dessus.

La détection des collisions est extrêmement importante ; premièrement, si des maillages se rentrent dedans ça réduit le réalisme, et, deuxièmement, une fois que c'est arrivé, les zones qui s'intersecte adhèrent fortement les unes aux autres et sont difficiles à séparer. C'est pourquoi il existe une série de paramètres distincts (ci-dessous) qui n'affectent que la collision et peuvent être calculés plus rapidement que si les valeurs Sous-étapes et Iterations étaient augmentées, ce qui nécessite beaucoup de temps de calcul et modifie également des propriétés importantes telles que la rigidité du tissu.
Ces paramètres de collision font référence à des processus de calcul internes et semblent compliqués dans la description - et en principe ils le sont, bien que déjà décrits aussi simplement que possible. De manière générale, les valeurs doivent être augmentées avec précaution si les collisions sont problématiques.
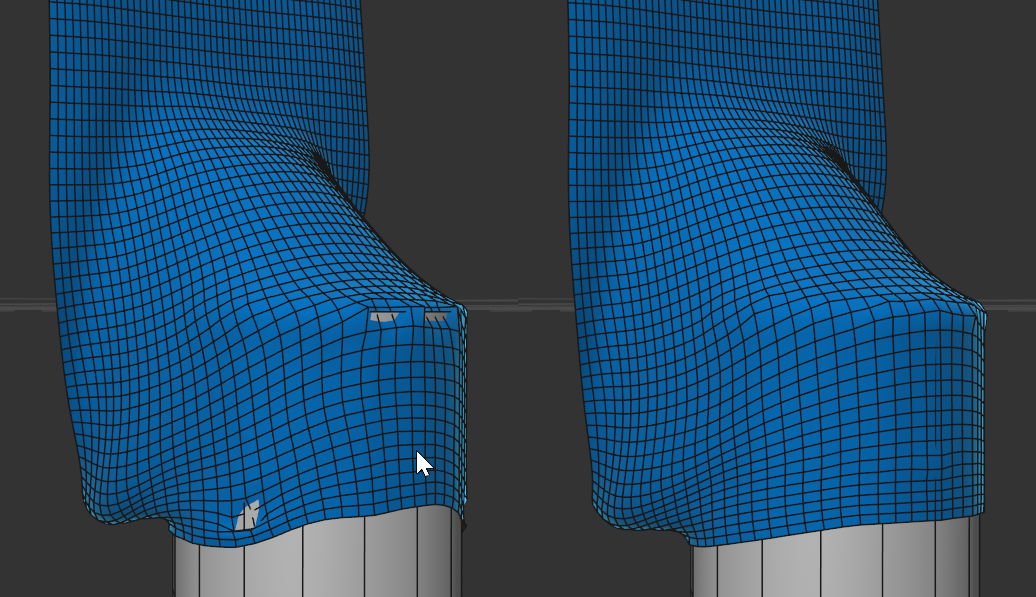 Un textile en mouvement rapide entre en collision avec un cylindre, avec des Passes 0 il y a des pénétrations sur le côté gauche, sur le côté droit il n'y a pas de pénétrations avec une valeur de 5.
Un textile en mouvement rapide entre en collision avec un cylindre, avec des Passes 0 il y a des pénétrations sur le côté gauche, sur le côté droit il n'y a pas de pénétrations avec une valeur de 5.
Ceci définit la fréquence à laquelle une détection de collision est effectuée par image d'animation. Si une collision est détectée, des contraintes de collision dynamiques et temporaires (dont la précision peut être contrôlée à l'aide des 3 paramètres suivants) sont créées afin de garantir que l'objet auquel la propriété est attribuée ne peut pas pénétrer dans d'autres géométries de collision - ou dans la sienne.
Si vous définissez une valeur de 1 ici, une détection de collision est effectuée au début temporel de la trame de simulation. Toutes les contraintes de collision créées seront maintenues jusqu'à la prochaine détection de collision et seront prises en compte et évaluées pour chaque sous-étape.
L'augmentation de cette valeur peut être avantageuse, en particulier pour les géométries rapides, en rotation rapide ou en mouvement généralement non linéaire. Pour à peu près n'importe quelle pénétration, augmenter les Passes peut être utile.
Assurez-vous que la valeur Sous-étapes n'est pas inférieure aux Passes de collision, sinon rien ne se passera.
Au moyen de ce paramètre, des itérations supplémentaires sont effectuées uniquement pour les contraintes de collision préexistantes trouvées précédemment par Passes et Passe en fin d'image. Cela permet également d'éviter les collisions.
Assurez-vous qu'avant d'augmenter le nombre de Passes, Passe en fin d'image et/ou les Sous-étapes, essayez d'abord d'activer cette option ici. C'est peut-être tout ce qu'il faut. Les itérations en plus peuvent être calculées relativement rapidement.
Ce paramètre insère des requêtes de collision supplémentaires à la fin temporelle du cadre de simulation, alors que toutes les nouvelles positions de points ont déjà été calculées. Cela devrait éviter que des pénétrations existantes (que l'algorithme a initialement négligées) soient présentes lors du calcul du cadre de simulation suivant, ce qui pourrait être problématique pour la simulation. Pour chaque processus, les contraintes de collision nouvellement découvertes seront calculées plusieurs fois (aussi souvent que défini sous Itérations).
Notez que seules les petites valeurs de l'ordre de 1 à 3 apportent un avantage.
Vous pouvez également augmenter la valeur des passes, mais la passe en fin d'image est généralement plus rapide.
En particulier pour les objets de collision en mouvement, l'augmentation du nombre de passes (et des itérations en plus) peut permettre d'obtenir de meilleurs résultats.
Ces paramètres vous permettent d'afficher certains éléments de simulation. Ceux-ci n'ont qu'un but informatif L'option Afficher peut être utilisée pour activer ou désactiver la configuration de l'affichage pour les paramètres suivants.
Notez que les éléments ne sont réellement affichés que lorsque la simulation est lancée (donc normalement à partir de l'image 1).
Permet d'afficher les points de l'objet simulé. Le rayon de collision (Épaisseur ou Rayon pour les maillages ou les splines) s'affiche également.
Ici, le rayon de collision défini par le paramètre Epaisseur peut être affiché pour la plupart des objets Simuler pouvant subir des collisions. Pour les tissus, les corps souples, etc., ces éléments sont affichés autour de chaque point de maillage, tandis que pour les corps rigides, la forme de la collision ainsi que l'adresse Épaisseur sont visualisées.
Cette option est destinée aux splines avec une propriété Corde. Un vecteur vert s'affiche entre chaque point de la spline. Plus les contraintes splines internes sont fortes, moins les vecteurs s'écartent de l'alignement de leurs voisins au cours de la simulation (attention à l'option Torsion ).
Cela permet d'afficher les contraintes d'étirement préservant la structure. Ils sont toujours situés entre des points d'objets voisins et des connexions diagonales connectables (voir également Diagonales de quads).
Ce mode - certes peu informatif - montre les contraintes de flexion qui font qu'un objet tissu ne s'effondre pas simplement sur lui-même, mais que les changements d'angle entre les polygones sont contrés par une certaine résistance.
Grâce à cette option, les contraintes du pôle (même si elles sont désactivées dans l'onglet Corps souples) peuvent être affichées. Si des tiges doivent se déchirer, cela sera également représenté par le masquage de ces tiges ; l'option Afficher doit être désactivée.
Cette option peut être utilisée pour afficher les contraintes des connecteurs (même si elles sont désactivées dans la propriété du connecteur ou si aucune propriété de connecteur n'est sélectionné). Si des tiges doivent se déchirer, cela sera également représenté par le masquage de ces tiges ; l'option Afficher doit être désactivée.
Il est utilisé pour marquer le centre de masse des corps rigides avec un petit système d'axes. C'est là que la force du poids s'exerce. Le centre de masse peut être positionné librement dans les paramètres du corps rigide.
Sur Formes de collision, par exemple, une forme de collision de substitution rapidement calculable peut être spécifiée. Cette option permet d'afficher la forme de collision active dans la vue. Si les corps rigides sont désactivés, leur forme sera affichée en noir.