Nota:In questa tab sono presenti alcuni parametri che non funzionano ancora per il sistema di Simulazione, ma solo per il vecchio Bullet Dynamics. Uno di questi è il settaggio Vincolo. Si prega di ignorarli nel nuovo sistema di Simulazione.
Tipo
I vari Connettori. Nota che la modalità Fisso non è visualizzata.
Con il menu Tipo possiamo definire 5 tipi di Connettori (corrispondenti ai 5 comandi del menu principale Simulazione | Connettori), che possono poi essere definiti in modo più dettagliato con il menu Modo. Sono disponibili queste modalità:
Modo
Fisso
Questo Modo non consente alcun movimento "relativo" tra gli oggetti. Consente di collegare tra loro oggetti costituiti da parti separate.
Cerniera
Una Cerniera consente solo un movimento di rotazione intorno al punto centrale della cerniera stessa. Il movimento di rotazione avviene esclusivamente nel piano compreso tra gli assi X e Y del Connettore.
L'angolo di movimento può inoltre essere limitato.
Cardano
In linea di principio, un giunto cardanico è costituito da 2 cerniere che formano un angolo di 90°. Ciò consente movimenti relativamente complessi.
L'applicazione tipica di un giunto cardanico è trasferire la forza rotatoria agli angoli. Affinché questo funzioni, devono essere soddisfatti 2 prerequisiti:
Gli assi di rotazione dei due oggetti collegati devono intersecarsi
Il Connettore deve trovarsi esattamente all'intersezione dei due assi di rotazione.
L'angolazione del giunto cardanico può essere limitata su entrambi gli assi di rotazione.
Giunto Sferico
Un giunto sferico consente la rotazione in tutte e 3 le dimensioni. L'articolazione della spalla in un corpo umano, ad esempio, è un'articolazione a sfera.
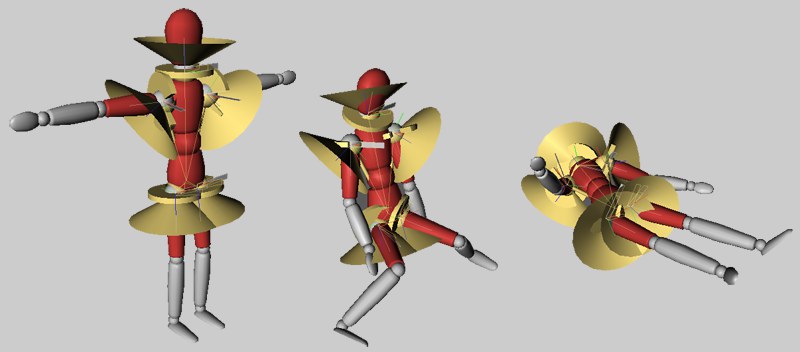
Ragdoll
Il Connettore Ragdoll è un giunto sferico (vedi sopra) la cui rotazione angolare può essere limitata all'interno di un'area di forma conica regolabile. Inoltre, è possibile definire un limite angolare della rotazione dell'asse verticale.
Il termine "ragdoll" riflette la funzione prevista del Connettore: ad esempio, può essere utilizzato per alcune articolazioni umane come l'articolazione dell'anca o della spalla:
Il Connettore Ragdoll garantisce movimenti articolari umani naturali.
Cursore
Un cursore limita le possibili direzioni di movimento a un solo asse, ovvero l'asse Z del Connettore.
La libertà di movimento viene limitata in termini di lunghezza.
Cursore a Torsione
Un cursore rotante limita le possibili direzioni di movimento a un solo asse, ovvero l'asse Z del Connettore. Può anche essere ruotato attorno all'asse del cursore.
La libertà di movimento può essere limitata sia in termini di lunghezza che di rotazione.
Planare
Una superficie permette i movimenti solo nel piano X-Z del Connettore.
La libertà di movimento può essere limitata in tutte e 4 le direzioni.
Cubico
Un cuboide permette tutte le direzioni di movimento, ma può essere limitato in tutte e 6 le direzioni.
Sospensione a Ruota
Questo tipo è un po' diverso rispetto agli altri. Consente i movimenti nella direzione Y del Connettore e la rotazione intorno all'asse Z del Connettore. Fin qui nulla di strano. Ma qui c'è una molla in più , lungo l'asse Y del Connettore. Con questa è possibile creare in modo molto facile e veloce sistemi di ruote dinamiche, elastiche e persino sterzanti. Persino un carro armato! Una scena di esempio si trova su: <TEXT_ID TRIGIDBODY-RIGIDBODY_PBD_FRICTION> Attrito</TEXT_ID>.
Ignora Collisioni
Questa opzione si applica solo alle collisioni tra i due oggetti collegati dal Connettore. A volte, durante la costruzione di una scena, quando si stanno testando le combinazioni di base dei Connettori, sarebbe dannoso lasciare che le query di collisione abbiano effetto.
Selezione
Qui possiamo inserire un tag Selezione MoGraph con i Connettori selezionati. Solo i Connettori contenuti nella selezione verranno considerati per le collisioni tra i Corpi Rigidi collegati.
Raggio Cono[0..89°]
Con il tipo di ConnettoreRagdoll, il movimento può essere limitato all'interno di uno spazio conico. Qui possiamo regolare l'ampiezza del cono.
Ellisse
Raggio Cono Y[0..89°]
Attivando questa opzione, il cono (perfetto) può essere deformato in un cono compresso. Il raggio Y del cono regolerà quindi la compressione.
Angolo di Sterzata[-∞..+∞°]
Questo e i 4 parametri successivi vengono visualizzati solo quando si utilizza il TipoSospensione a Ruota.
Angolo di Sterzata definisce l'angolo della ruota intorno all'asse Y del Connettore. Se animate questo parametro, potete simulare il controllo realistico di un veicolo.
Sospensione Posizione di Riposo[-∞..+∞m]
Serve a definire la posizione di riposo della sospensione, a partire dall'origine del Connettore. Valori negativi spingono il veicolo verso l'alto.
Rigidità Sospensione[0.00..+∞]
Il valore Rigidità Sospensione definisce l'entità delle forze che la sospensione esercita quando la lunghezza cambia rispetto alla fase di riposo. Più una sospensione è dura, più è difficile da comprimere o estendere lungo la propria lunghezza (e più velocemente oscilla).
Smorzamento Sospensione[0..+∞%]
Se conoscete un po' le auto, non esiste sospensione senza "smorzamento" (pensate all'ammortizzatore). Grazie all'ammortizzazione, le vibrazioni vengono rapidamente attenuate e lo pneumatico rimane sempre sulla strada. Maggiore è il valore Smorzamento Sospensione, più velocemente le sospensioni tornano a riposo.
Rimbalzo[0..+∞%]
Se sono stati definiti dei limiti angolari con Da o A, possiamo utilizzare questo parametro per specificare quanto l'oggetto si ritrae (rimbalza indietro) dopo aver raggiunto il punto di stop.
Limite Inferiore X
Da[-∞..+∞m]
Limite Superiore X
A[-∞..+∞m]
Limite Inferiore Y
Da[-∞..+∞m]
Limite Superiore Y
A[-∞..+∞m]
Limite Inferiore Z
Da[-∞..+∞m]
Limite Superiore Z
A[-∞..+∞m]
Per i tipi di Connettore che consentono uno spostamento, questo può essere limitato lungo gli assi a partire dall'origine del Connettore.
Limite Angolo
Limite Angolo 2
Da[-∞..+∞°]
a[-∞..+∞°]
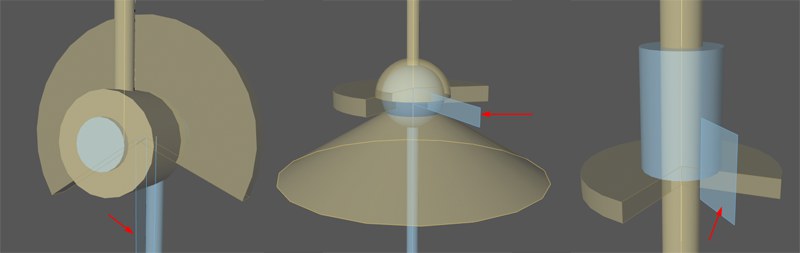
Limiti di angolo per vari connettori. Il puntatore di arresto contrassegnato dalla freccia centrale può muoversi solo entro i limiti gialli.
Per quasi tutti i tipi di Connettore che hanno a che fare con la rotazione, esistono restrizioni per gli angoli. Queste possono essere definite mediante questi parametri.
Se non andiamo a definire dei limiti angolari, gli oggetti potrebbero ruotare all'infinito intorno al centro della cerniera in caso di movimento rotatorio (all'infinito in direzione del cursore nel caso di movimenti lungo un binario).
Notare che questi limiti angolari si applicano solo nell'intervallo di UN SOLO giro completo, cioè non possiamo definire una restrizione del tipo "Girare a 720° e poi fermarsi".
Il tipo di Connettore Cardano, che consente 2 piani di rotazione, può essere ulteriormente limitato mediante il Limite Angolo 2.
Forza di Rottura
Forza[0..+∞m]
Torsione di Rottura
Torsione[0.00..+∞]
Un valore limite per la forza e/o la torsione può essere inserito in TipoFisso. Se la forza e/o la torsione che agisce sul Connettore supera questi valori limite, il Connettore cede e si rompe, comportandosi come se non ci fosse più o fosse spento.
Si noti che potreste dover inserire valori molto alti, anche di cinque o sei cifre, a seconda della scena e delle forze in gioco.
Valori elevati rendono il Connettore più stabile, mentre valori più bassi ne causano la rottura anticipata.
Selezione
Pesi
Selezione
Pesi
Pesi
Selezione
Pesi
Pesi
Selezione
Pesi
Pesi
Selezione
Pesi
Selezione
Pesi
Selezione
Pesi
Selezione
Pesi
Selezione
Pesi
Selezione
Pesi
La freccina a sinistra di numerosi nomi di parametri può essere utilizzata per visualizzare dei campi di collegamento espandibili chiamati Pesi o Selezione. Qui vengono memorizzati i tag Selezione MoGraph o le Mappe Peso MoGraph,che possono essere creati in modo interattivo con Selezione MoGraph o Pennello Peso Mograph dipingendo sui Connettori. In alternativa, questi possono essere impostati anche tramite i Campi.
Hanno il seguente effetto:
Selezione: Viene sempre assegnata a un'opzione. Un tag Selezione MoGraph definisce a quali Connettori si applica l'opzione in base alla selezione memorizzata del Connettore.
Pesi: Sono sempre assegnati al valore di un parametro. Questo valore definisce un valore massimo che verrà assegnato a Connettori specifici dal Peso. Se, ad esempio, il valore del parametro è impostato su 200 cm e viene definito un Peso di 0,5 o 50%, il valore 100 cm influenzerà questo Connettore.
Nota: Si noti che i singoli oggetti possono anche essere raggruppati in un oggetto Frattura, il che significa che funzioneranno anche con i due strumenti citati.
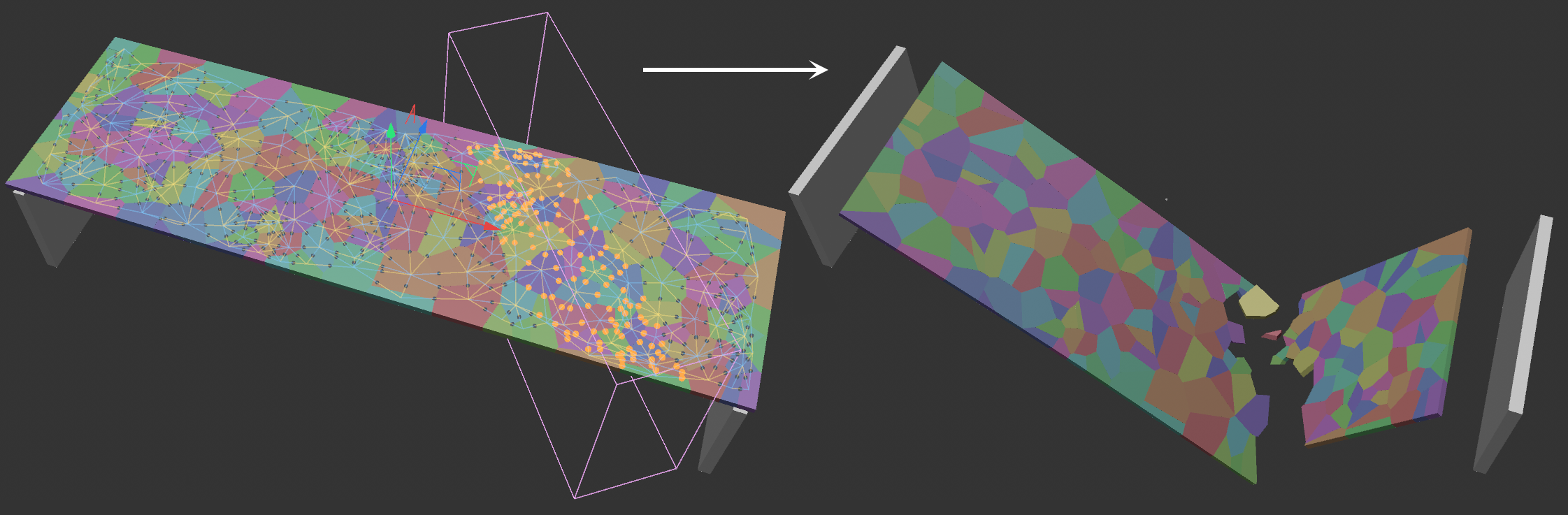
Un tag Selezione MoGraph (controllato da un campo Cubico) nel campo Selezione del parametro Forza di Rottura controlla il processo di rottura di un oggetto Frattura Voronoi.
Oggetti
Questo elenco di oggetti contiene tutti gli oggetti connessi dai Connettori. Come vengono inseriti gli oggetti nell'elenco?
Quando il Connettore viene creato, tutti gli oggetti attualmente selezionati vengono aggiunti all'elenco.
Possiamo trascinare e rilasciare gli oggetti al suo interno.
Affinché i Connettori funzionino correttamente, gli oggetti collegati devono essere Corpi Rigidi (con Bullet Dynamics funzionano anche i corpi morbidi).
Nota: Attualmente con il sistema di Simulazione non è possibile collegare un Connettore a un altro.
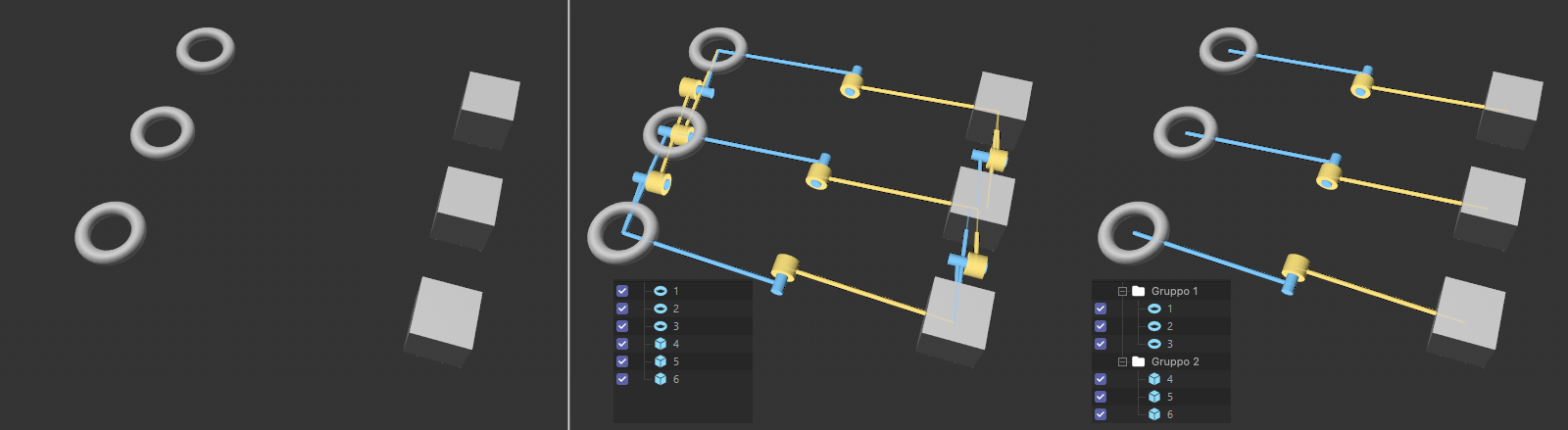
Creazione di un gruppo
Possiamo utilizzare l'icona a forma di cartella per creare gruppi con cui combinare gli elementi. Non verranno creati Connettori all'interno degli elementi di un gruppo, ma verranno creati per gli elementi di altri gruppi o per gli elementi senza gruppo.
Gli elementi all'interno di una cartella non sono collegati con i Connettori.
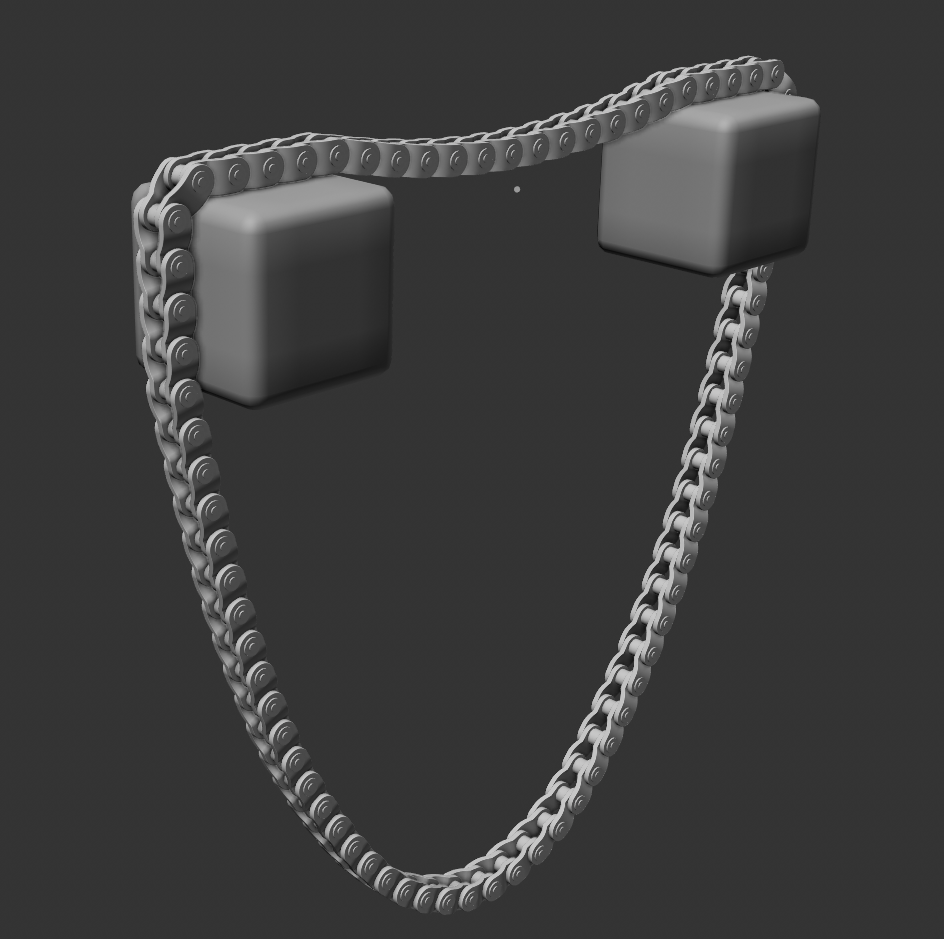
Nell'immagine precedente, i toroidi devono essere collegati ai cubi opposti. In modalità Distanza, anche il toroidi e il cubo sono inizialmente collegati tra loro, poiché sono più vicini delle rispettive controparti. Se entrambi vengono inseriti nel loro gruppo, le connessioni verranno effettuate solo con l'altro gruppo.
Nota: Selezionate un elemento nell'elenco per trovare ulteriori impostazioni visualizzate sotto l'elenco. Qui possiamo definire alcuni dettagli sull'applicazione delle forze e sul fissaggio dei Corpi Rigidi.
Creazione di impostazioni
Queste impostazioni (che non potranno essere modificate dopo l'avvio della simulazione fino al termine della stessa) possono essere utilizzate per controllare la generazione automatica dei Connettori tra i Corpi Rigidi nell'elenco degli oggetti.
Se ad esempio è presente un oggetto Clona, possiamo creare molte migliaia di Connettori, ognuno dei quali collegherà una coppia di Corpi Rigidi al centro.
Nota: Se nell'elenco degli oggetti sono presenti solo 1 o 2 Corpi Rigidi, l'area Crea Impostazioni sarà in grigio, poiché la creazione automatica di connettori non è necessaria (in questo caso è attivo esattamente 1 Connettore per oggetto Connettore). Questo può funzionare solo con 3 o più oggetti
Modo
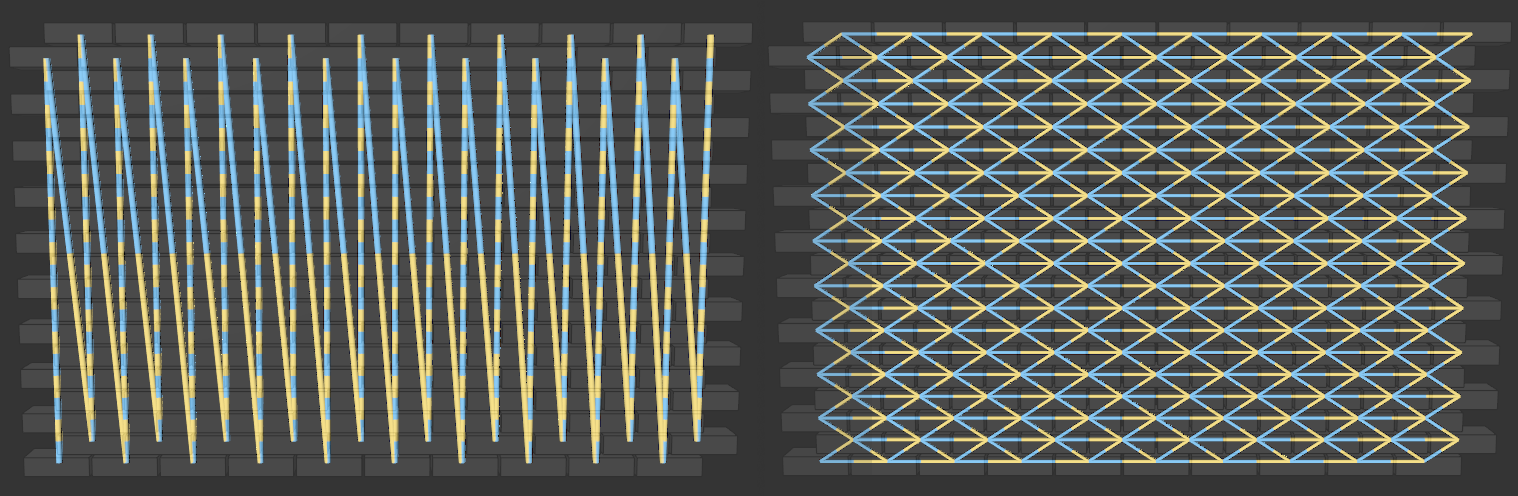
Un oggetto Clona viene utilizzato per creare un muro di mattoni. I mattoni sono collegati come segue mediante connettori: modoIndice a sinistra, Distanza a destra.
Esistono due modalità di base per la creazione dei Connettori, ognuna delle quali visualizza parametri diversi:
Indice
L'ordine dei Corpi Rigidi è decisivo: il Corpo Rigido corrente è sempre collegato a quello successivo. Ma qual è il "successivo"? E' molto semplice: il "successivo" è determinato dall'ordine nell'elenco degli oggetti. Se è presente un oggetto Clone: i cloni saranno numerati internamente (vedi anche Mostra Indici). I connettori verranno creati e collegati di conseguenza.
Se nell'elenco degli oggetti sono presenti degli oggetti che sono genitori di altri oggetti (in Gestione Oggetti), verranno presi in considerazione anche i loro fioggetti figlili.
Nota: Sono possibili al massimo 2 Connettori per Corpo Rigido: uno al precedente e uno al successivo (naturalmente, non c'è motivo di non creare altri oggetti connettori, che a loro volta creano Connettori).
Come possiamo vedere nell'immagine a sinistra, non ha molto senso che un mattone della fila inferiore sia collegato a uno della fila superiore.
Il metodo "più naturale" è quindi quello successivo: il modo Distanza.
Distanza
Questa modalità collega i Corpi Rigidi in base alla loro distanza reciproca.
All'aumentare del Raggio di Ricerca, i Corpi Rigidi spazialmente vicini saranno collegati per primi. Di solito questo metodo corrisponde di più alla realtà rispetto al modo Indice. Immaginate un muro di mattoni: i singoli mattoni sono collegati a quelli vicini dal cemento; non solo ai mattoni precedenti/successivi, ma anche a quelli sopra/sotto. Questo è esattamente lo scopo del Modo Distanza: connettersi a livello locale, come mostrato sopra a destra.
In questa modalità, possiamo collegare molti Connettori a uno stesso Corpo Rigido, a differenza della modalità Indice, che consente un massimo di 2 Connettori.
Loop
Questa opzione, visualizzata solo in modo Indice, collega il primo e l'ultimo Corpo Rigido nell'elenco degli oggetti. Se è presente un oggetto Clona, il primo e l'ultimo clone sono collegati.
Raggio di Ricerca[-∞..+∞m]
Il Raggio di Ricerca definisce la distanza da Corpo Rigido a Corpo Rigido tra le cui origini devono essere creati i Connettori.
La distanza è definita da mesh a mesh. Pertanto, vale quanto segue: la ricerca avviene tra le superfici, tra le origini.
Se notate delle discrepanze, soprattutto con oggetti molto lunghi e a bassa risoluzione, provate ad aumentare la risoluzione della mesh dei Corpi Rigidi coinvolti.
Fate attenzione ad usare raggi di ricerca troppo ampi, perché potrebbero condurre rapidamente ad un numero enorme di Connettori, rallentando di conseguenza il calcolo della simulazione. La seguente impostazione può evitare questa situazione.
Limita Connessioni
Max[1..2147483647]
A seconda del Raggio di Ricerca definito, possono essere creati moltissimi Connettori, in quanto TUTTI i Corpi Rigidi all'interno di questo raggio saranno collegati a tutti gli altri. Per limitare il numero di connettori, attivate Limita Connessioni e impostate il numero di connessioni usando il settaggio Connessioni Max impostando interattivamente un limite massimo. Si noti che non si tratta di un valore assoluto, ma appunto di un limite massimo. Il parametro Max. definisce il numero massimo di connettori da utilizzare. ma potrebbero essercene di meno, o addirittura nessuno. Ciò accade, ad esempio, quando gli oggetti vicini hanno già raggiunto il numero massimo di Connettori.
2025
Settaggi di Posizionamento
I connettori tra le singole maglie della catena creano la catena.
Le seguenti impostazioni riguardano il posizionamento e l'allineamento dei connettori generati automaticamente tra i singoli Corpi Rigidi. Mentre è facile posizionare e allineare gli oggetti Connettore in modo interattivo, non è altrettanto semplice con i connettori generati automaticamente, poiché questi si basano sui sistemi di coordinate separati dei partner di collegamento.
Qui troverete quindi una serie di impostazioni che vi aiuteranno nel posizionamento/allineamento automatico.
Riferimento di Posizionamento
Offset[-∞..+∞%]
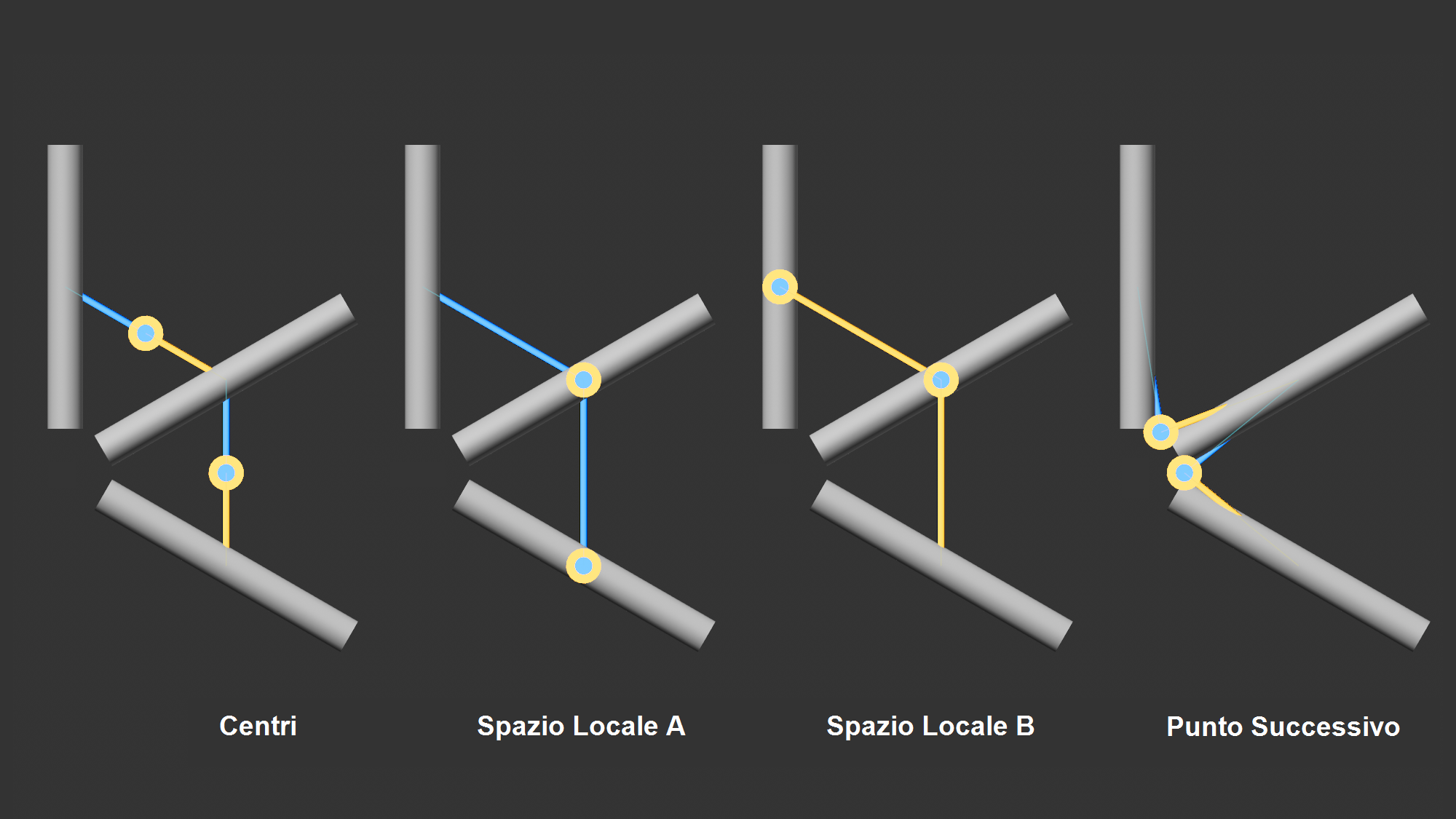
Le possibili modalità per la posizione.
Usate Posizione di Riferimento per definire la posizione dei rispettivi connettori tra i partner di collegamento A e B.
Potete scegliere tra le seguenti opzioni:
Centro: il connettore è posto al centro tra A e B. Più precisamente si troverà su una linea retta formata dalle origini di A e B, dove, tramite Offset, possiamo definire un punto esatto (es.: 50% corrisponde esattamente al centro).
Spazio Locale A/B: qui utilizziamo il sistema di coordinate del partner di collegamento A o B. Il connettore può essere posizionato liberamente utilizzando Offset e i suoi parametriX, Y e Z.
Punto Successivo: qui si cerca di trovare la distanza più breve tra le superfici di A e B. Il connettore viene posizionato su questa linea retta, tenendo conto dell'Offset (50% = centro, 0%/100% = superficie A o B).
Nota: Questo funziona in modo meno preciso con gli oggetti a risoluzione grossolana rispetto a quelli a risoluzione sottile, quindi può essere utile per suddividere maggiormente i partner di collisione in caso di imprecisioni.
Orientamento
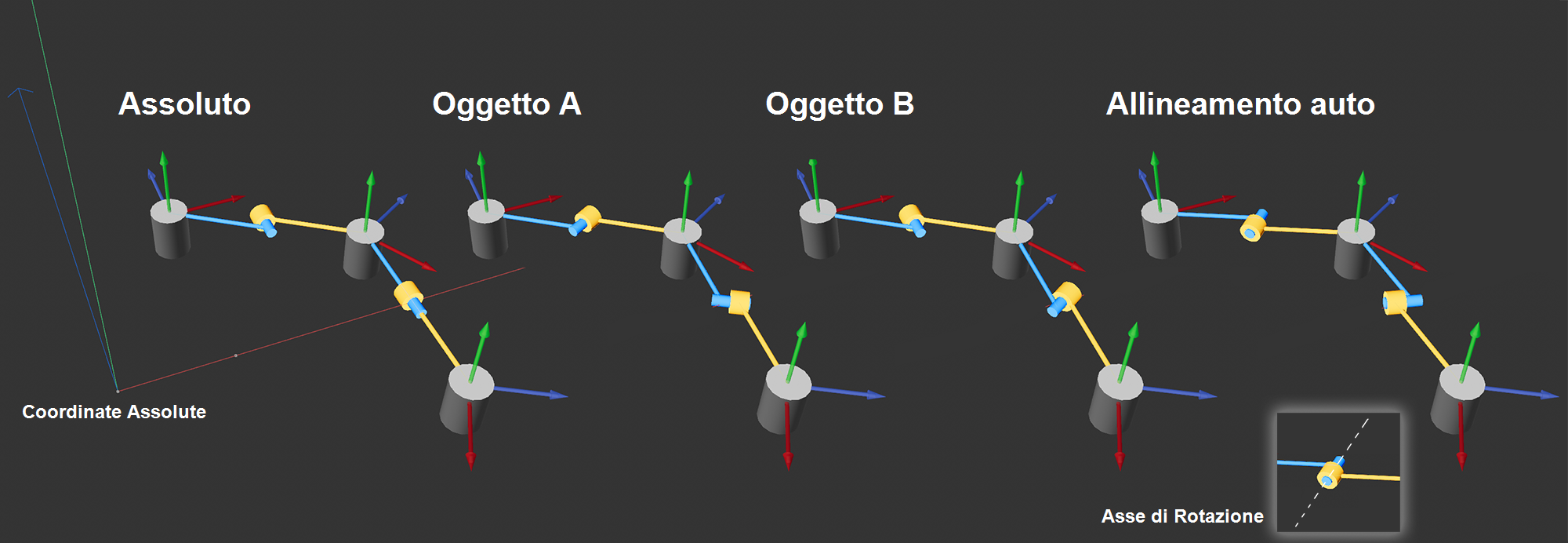
Qui potete vedere come sono allineati gli assi di rotazione del connettore nelle diverse modalità.
Con Allineamento si definisce l'orientamento dei connettori tra i partner di collegamento A e B. Questo aspetto è particolarmente importante per le cerniere, in quanto determina l'asse di rotazione. Per le cerniere, l'asse di rotazione è sempre l'asse Z del connettore.
È possibile scegliere tra:
Assoluto: i connettori sono orientati con il loro asse Z verso l'asse Z assoluto.
Oggetto A/B: i connettori ruotano con i propri assi Z in direzione degli assi Z dell'oggetto A (o dell'oggetto B).
Allineamento Automatico: i connettori si allineano in modo che i loro assi Z siano perpendicolari al collegamento dei centri di massa dei due Corpi Rigidi coinvolti.
Si prega inoltre di notare che:
L'oggetto Connettore può essere spostato e ruotato, il che significa che anche i singoli Connettori in esso contenuti possono essere spostati/ruotati attorno al proprio asse.
L'oggetto Connettore può essere reso modificabile premendo il tasto C, che consente di accedere direttamente alle proprietà di ogni singolo Connettore.
Creazione Automatica
Se l'opzione Creazione Automatica è attiva, i Connettori vengono creati "in diretta" quando le impostazioni di creazione vengono modificate. Questo può essere complicato da gestire se abbiamo un gran numero di Connettori. In questo caso, disattivate l'opzione e create ed eliminate i Connettori con un clic utilizzando gli omonimi pulsanti.
Nota: Attualmente si consiglia di lasciare attiva l'opzione Creazione Automatica se desiderate modificare i parametri del connettore (ad esempio, Ignora Collisioni, Forza, ecc.) dopo la generazione. In alternativa, possiamo anche cliccare su Crea dopo aver modificato i parametri.
Crea
Il pulsante Crea attiva sempre una nuova creazione dei Connettori, tenendo conto di tutte le impostazioni.
Cancella
Questo pulsante elimina tutti i Connettori creati automaticamente. L'oggetto Connettore verrà mantenuto.
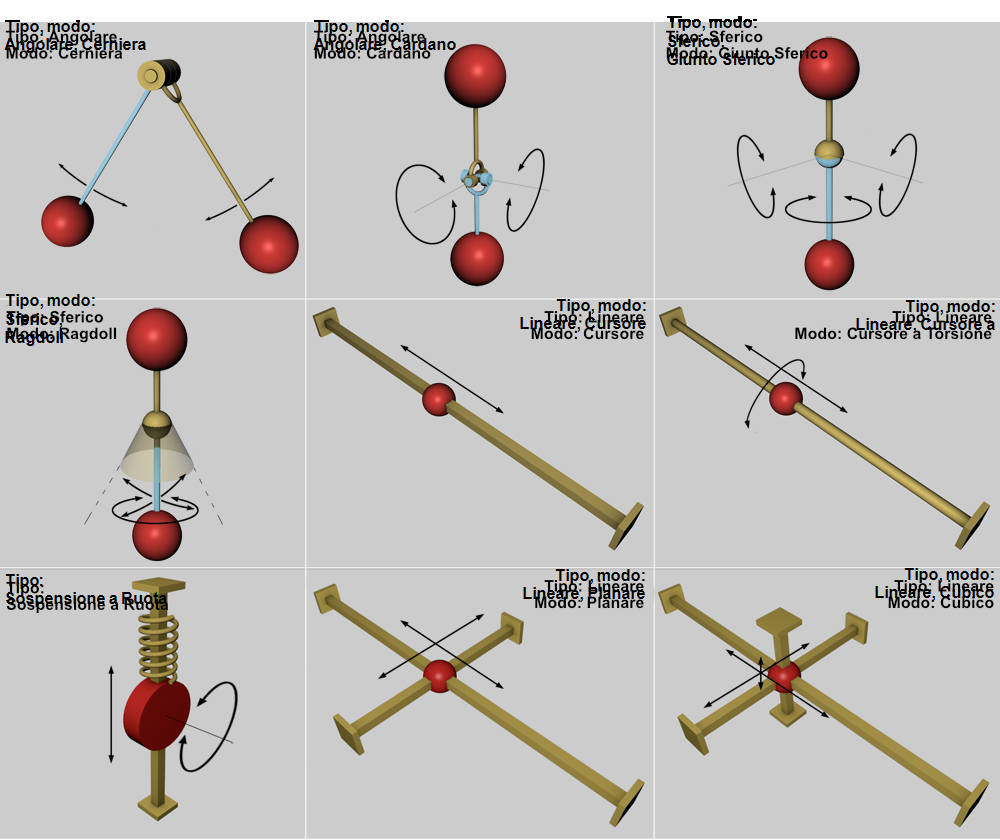 I vari Connettori. Nota che la modalità Fisso non è visualizzata.
I vari Connettori. Nota che la modalità Fisso non è visualizzata.
 Il Connettore Ragdoll garantisce movimenti articolari umani naturali.
Il Connettore Ragdoll garantisce movimenti articolari umani naturali.
 Limiti di angolo per vari connettori. Il puntatore di arresto contrassegnato dalla freccia centrale può muoversi solo entro i limiti gialli.
Limiti di angolo per vari connettori. Il puntatore di arresto contrassegnato dalla freccia centrale può muoversi solo entro i limiti gialli.