Objekt-Eigenschaften
Es gibt grundsätzlich 2 Typen von Motoren:
Es wird eine lineare Kraft parallel zur Motor-Z-Achse erzeugt.
Es wird ein Drehmoment um die Motor-Z-Achse erzeugt.
Es werden beide oben genannten Typen gleichzeitig erzeugt.
Die beiden Felder Objekt A/B finden Sie bei diesen dynamischen Objekten:
- Konnektor
- Motor
- Feder
Diese 3 Objekte verbinden jeweils 2 Objekte auf verschiedene Arten und Weisen.
Die beiden Objekte können in die Felder Objekt A und Objekt B gezogen werden.
Wenn Sie eins der beiden Felder leer lassen, bedeut das für:
- Konnektoren: Position und Winkel der Konnektoren sind fixiert (ansonsten bewegt/dreht sich der Konnektor mit den Objekten mit).
- Motoren: der Grundsatz "actio = reactio" ist außer Kraft gesetzt; die Kraft bzw. das Drehmoment wirken quasi aus dem Nichts heraus (s.u.).
- Feder: eines der Federenden liegt im Weltursprung.
Wie die beiden zu verbindenden Objekte in der Reihenfolge Objekt A und Objekt B zugewiesen werden, spielt bis auf den Konnektorentyp Ragdoll und Radfederung keine Rolle.
Für den Motor gilt für ein freigelassenes Feld: Nach den Regeln der Physik ("actio = reactio") hat jedoch jede durch ein Objekt wirkende Kraft bzw. jedes Drehmoment eine entgegengesetzte Komponente am jeweils anderen Objekt. Dieses Prinzip wird erfüllt, wenn Sie beide Felder füllen. Bestes Beispiel ist ein Hubschrauber: Der Rotor wird von einem Motor angetrieben und dreht sich dementsprechend. Gleichzeitig wirkt ein entgegengesetztes Drehmoment am Hubschrauberrumpf. Um dieses auszugleichen, gibt es den Heckrotor. Ansonsten würde sich der Rumpf ständig um die Hochachse drehen.
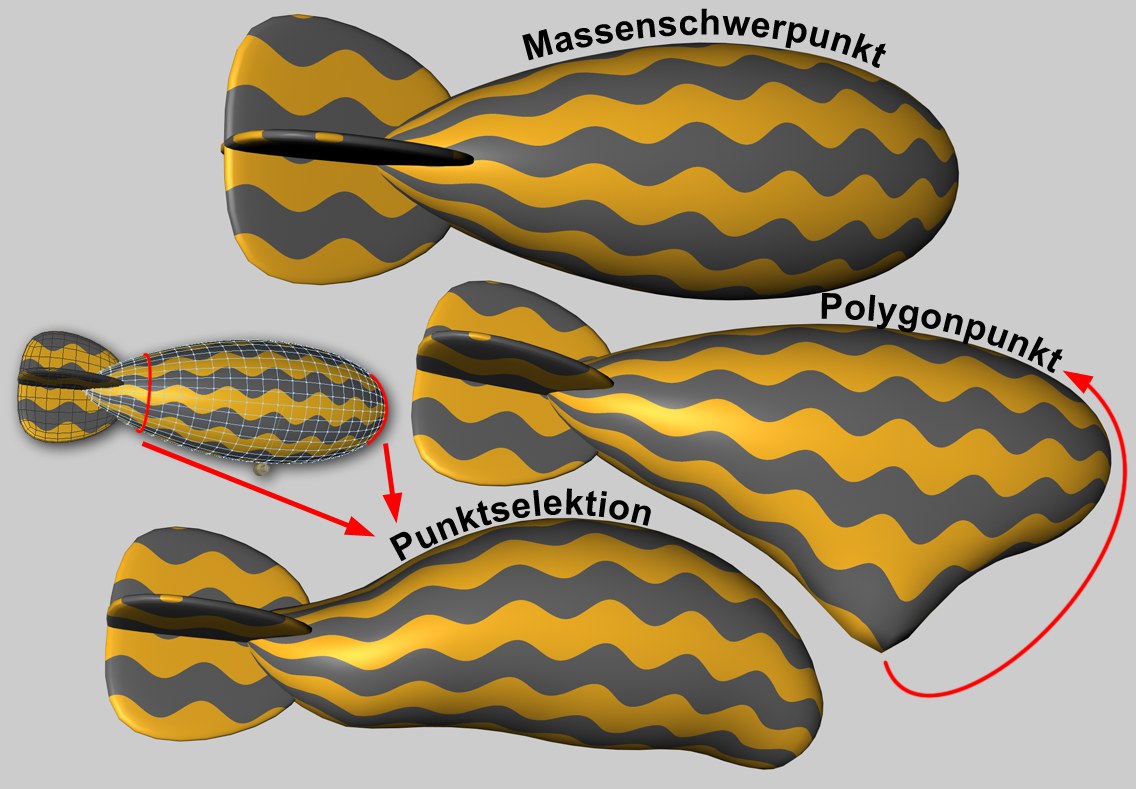 Ein aufwärts steigender Zeppelin wird von einem Konnektor mit verschiedenen Bindungen gehalten. Richtig, bei Massenschwerpunkt tut sich nichts.
Ein aufwärts steigender Zeppelin wird von einem Konnektor mit verschiedenen Bindungen gehalten. Richtig, bei Massenschwerpunkt tut sich nichts.Überall dort, wo Kräfte in ein Objekt geleitet werden, ist es mitunter wichtig, in welchem Objektbereich das geschieht. Schiebt beispielsweise der Motor im Massenschwerpunkt, resultiert das in einer geradlinigen Bewegung des Rigid Body (sofern keine anderen Kräfte wirken). Greift die Kraft außerhalb des Massenschwerpunkts an, wird automatisch ein Drehmoment erzeugt und das Objekt versucht sich zu drehen.
Schwieriger wird’s beim Soft Body. Dort ist ja jeder Objektpunkt über Federn mit anderen Punkten verbunden. Greift die Kraft in nur einem Punkt an, kann es zu unschönen Ergebnissen kommen. Hier ist es möglich, die Wirkung über größere Bereiche einzuleiten.
Bindung A/B gibt es für diese Dynamics Objekte:
- Konnektoren
- Motoren
- Federn
Für diese Option gibt es keine weiteren Parameter, die Kraft wirkt im Massenschwerpunkt. Bei Soft Bodies hat das keine Verformung zur Folge.
Bei Auswahl dieser Option kann ein Objektpunkt bestimmt werden, wo die Kraft eingeleitet wird. Über Einflussbereich kann die Krafteinleitung auf einen größeren Bereich um diesen Objektpunkt ausgedehnt werden. Das ist nur für Soft Bodies von Bedeutung. Bei der Kombination Rigid Bodies/Konnektoren hat diese Einstellung keine Bedeutung.
Krafteinleitungen können auch per Map (Punkt-Selektions-Tag oder Vertex-Maps) vorgenommen werden. Es gibt hierbei dann einige zusätzlicher Parameter, die regeln, wie stark sich dann die Gestalt der selektierten (bzw. gewichteten) Punkte als ganzes ändern darf
Bei einem Motor mit "Linearer Kraft" bzw. einer Feder, kann ein Offset angegeben werden, der definiert (ausgehend vom Objektursprung), wo die Kraft anfassen soll. Gibt es einen Offset, wird auch immer ein Drehmoment erzeugt.
Index [-2147483648..2147483647]
Index [-2147483648..2147483647]
Das ist die Objektindexnummer. Intern sind alle Objektpunkte eines polygonalen Objektes (auch für alle generierten) durchnummeriert. Im Editor wird das interaktiv angezeigt, wenn Sie die Werte hier durchbrausen lassen.
Übrigens sind alle Objektpunkte (hier aber nur für wirklich polygonale Objekte) im Struktur-Manager aufgelistet.
Sie können hier ein Punkt-Selektions-Tag oder Vertex-Maps reinziehen.
Einflussbereich [1..1000%]
Einflussbereich [1..1000%]
Da es für Soft Bodies nicht ganz einfach ist, Krafteinleitungen in einem einzelnen Objektpunkt zu verarbeiten (oft sieht das unrealistisch aus), kann mit Einflussbereich ein einstellbarer Bereich um diesen Punkt definiert werden, wo die Kräfte mit linear abnehmender Wirkung eingeleitet werden. Bei Werten von 100% wird das gesamte Mesh erfasst, wobei der Polygonpunkt (bzw. die Punktselektion) mit 100% gewichtet werden und der entfernteste Punkt mit 0%. Bei kleineren Werten reagieren zunehmend weniger Punkte auf die Krafteinleitung, bei Werten um 1% wird nur ein Punkt bzw. nur die Selektion beeinflusst (wobei dann intern durch Schutzmechanismen dann doch größere Werte wirken).
Andererseits kann ein kleiner Wert dann sinnvoll sein, wenn Sie größere, durch Punktselektion definierte Bereiche (denken Sie an schlauchförmige Soft Bodies, die per Konnektor an einem Endpunktkreis befestigt sind) an Konnektoren, Federn oder Motoren gekoppelt werden wollen.
Formbewahrung [0..+∞]
Formbewahrung [0..+∞]
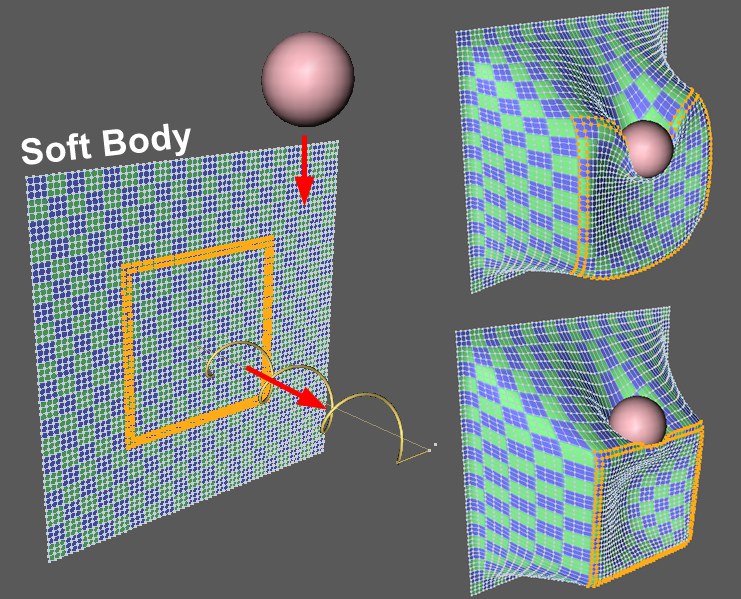 Markierte Punkt-Selektion eines Soft Bodies wird von einer Feder gezogen, gleichzeitig fällt eine Kugel auf die Selektion. Rechts oben kleiner, rechts unten großer Wert für Formbewahrung.
Markierte Punkt-Selektion eines Soft Bodies wird von einer Feder gezogen, gleichzeitig fällt eine Kugel auf die Selektion. Rechts oben kleiner, rechts unten großer Wert für Formbewahrung.Mit diesem Wert bestimmen Sie, inwieweit die Selektion bzw. die durch die Vertex-Map beeinflusste Punktgeometrie bei Krafteinleitung verformt werden können. Kleine Werte lassen starke, große Werte zunehmend weniger Verformungen zu.
Dämpfung [0..+∞%]
Dämpfung [0..+∞%]
Die Formbewahrung funktioniert intern über Federn, deren Dämpfung hier eingestellt werden kann. Kleine Werte lassen Schwingungen langsamer abklingen als große.
Wie unter Objekt A schon erwähnt, gilt "actio = Reactio" für die beiden Objekte. Wenn Sie physikalisch unkorrekt (was aber in den meisten Anwendungsfällen unerheblich sein dürfte) Kraft bzw. Drehmoment nur auf eines der beiden Objekte wirken lassen wollen, so können Sie das in diesem Auswahlmenü einstellen.
Es gibt hier diese beiden Modi:
Unter Berücksichtigung von Lineare Zielgeschwindigkeit bzw. Winkelzielgeschwindigkeit wird die Kraft bzw. das Drehmoment reduziert, wenn die jeweiligen Zielgeschwindigkeiten erreicht sind. Es wird jedoch niemals mehr Kraft bzw. Drehmoment verwendet, als hier definiert.
Hiermit wirkt ausschliesslich die definierte Kraft bzw. das Drehmoment ohne Geschwindigkeiten zu berücksichtigen. D.h. unter Umständen wachsen die Geschwindigkeiten ins Unermessliche.
Lineare Zielgeschwindigkeit [-∞..+∞m]
Falls unter Modus Geschwindigkeit regeln definiert ist, können Sie hier eine maximale Geschwindigkeit eingeben. Die Kraft wird dann intern abgeregelt, wenn diese Geschwindigkeit erreicht ist. Mittels des Vorzeichen bestimmen Sie die Geschwindigkeitsrichtung.
Mittels dieses Parameters lassen Sie eine lineare Kraft (Motor-Z-Achse) wirken. Je nach Masse und wirkender Reibung (z.B. Würfel sitzt auf Boden) des Objekts sind hier hohe Werte nötig.
Winkelzielgeschwindigkeit [-∞..+∞°]
Falls unter Modus Geschwindigkeit regeln definiert ist, kann hier eine maximale Winkelgeschwindigkeit definiert werden. Das Drehmoment wird bei Erreichen dieser Geschwindigkeit abgeregelt.
Mittels des Vorzeichens bestimmen Sie die Drehrichtung.
Mit dieser Einstellung können Sie ein Drehmoment wirken lassen (um die Motor-Z-Achse). Auch hier gilt, dass mitunter hohe Werte (vor allem bei grossen Drehmassen und wirkender Reibung) nötig sein können.