Parameter
Links the object whose values should be set or read out.
A Boolean value that will turn the Node on or off.
This setting lets you affect the dynamic guides directly. Each guide point can be set arbitrarily.
Use this port to pass on velocity as a vector.
• Index [-2147483648..2147483647]
Internally each guide and hair point has a unique consecutive number, which can be addressed individually. The numbers can be used with the Index input port to, for example, to connect a Hair Selection Node that contains all points within a given selection.
This setting will pass on forces as vectors, upon which dynamics will have an influence.
Use this port to define mass for guide points or hair points. This only makes sense if you want to stop the movement of individual guide points or hair points. Points with a mass of 0 will not be moved by dynamics. Otherwise, mass will have no influence on dynamics.
Use this port to pass the position on each guide or hair as a vector.
• Segment [-2147483648..2147483647]
• Guide [-2147483648..2147483647]
• Segment Delta [-∞..+∞]
Use these three input ports define exact positions on guides or hairs:
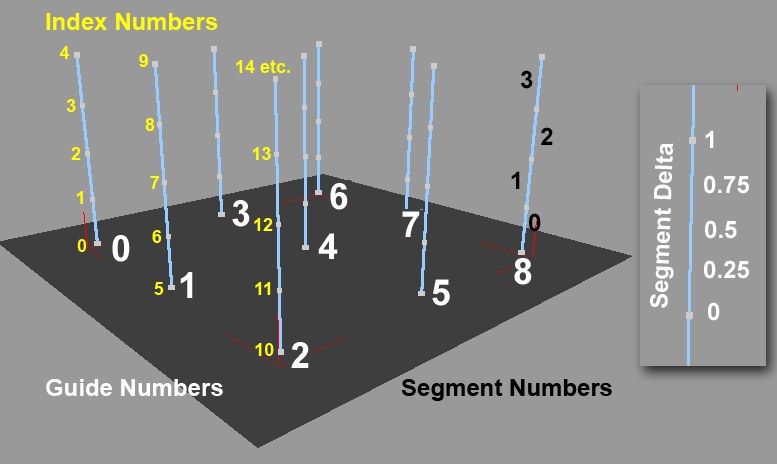 Guides, segments, and each individual guide point are numbered.
Guides, segments, and each individual guide point are numbered.The image above shows examples of consecutively numbered segments. All positions between guide points can be accessed using Segment Delta, and the index numbers, e.g., within the (Hair) Selection Tag, will be used to read out the selections contained in the tag.
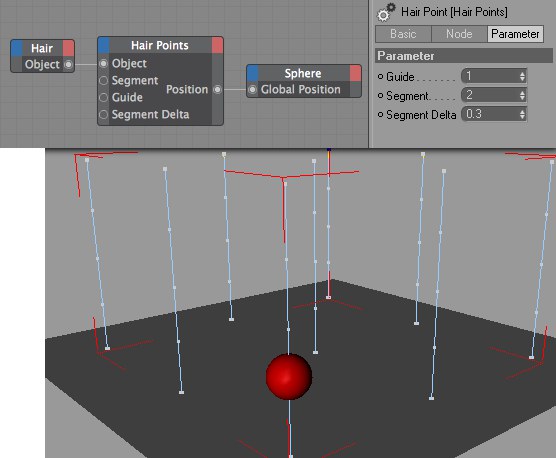
Using a setup as shown above, objects or object points can be placed precisely on guide or hair positions.
This port contains the exact positions in space, as defined by Object, Guide, Segment and Segment Delta, in vector form.
This port outputs the guide and hair tangents as vectors.
Use this port to output the velocity of any point approaching a guide.
Use this port to output the mass. The mass will generally be varied along the length of the entire guide (1). Mass can also be varied according to point, using the Hair object’s Dynamics tab.
Use this port to pass a force on to an input port. This force will be added internally to the dynamics forces, the sum of which will then be output.