Tag-Eigenschaften
In diesem Tab sind alle Attribute enthalten, die beschreiben, wie das Kollisionsobjekt mit anderen Simulationsobjekten (z.B. Rigid Bodies oder Pyro) interagiert und auf diese wirkt.
Ist diese Option aktiviert, kann das Objekt, dem das Kollisions-Tag zugewiesen ist, mit Simulationsobjekten in der Szene kollidieren. Eine Deaktivierung verhindert jegliche Kollisionen, egal mit welchem Kollisionselement.
Diese Einstellung kennen Sie schon vom Rigid Body (Kollisionsformen); sie funktionieren hier genauso.
Wenn Sie beispielsweise ein sehr hoch aufgelöstes, komplexes Kollisionsobjekt vorliegen haben, kann es sinnvoll sein, hier aus Geschwindigkeitsgründen eine simplere Kollisionsform zu verwenden.
Außerdem kann unter Umständen die Kollisionsberechnung mit Rigid Bodies bei Verwendung von simpleren Kollisionsformen (z.B.Quader) zu besseren Ergebnissen führen. Das kann sich z.B. bei rollenden Kugeln auswirken, die einfach “runder” abrollen.
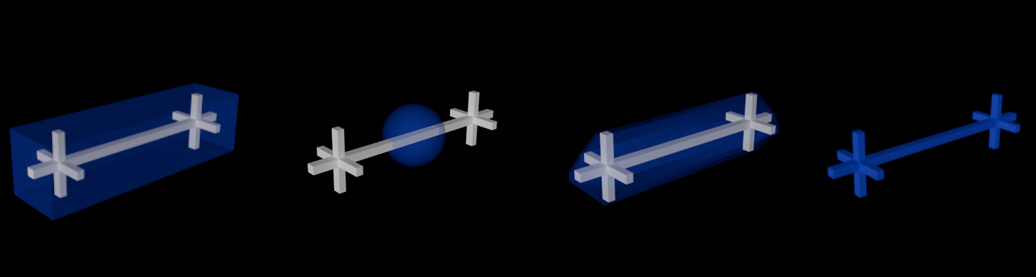 Von links nach rechts: Kollisionsformen in blau: Quader, Kugel, Konvexe Hülle (Geometriegenauigkeit = 0, kann mit höheren Werten aber sehr stark verbessert werden), Dreiecksmesh.
Von links nach rechts: Kollisionsformen in blau: Quader, Kugel, Konvexe Hülle (Geometriegenauigkeit = 0, kann mit höheren Werten aber sehr stark verbessert werden), Dreiecksmesh.
Kollisionsabfrageberechnungen sind im Allgemeinen eine rechenzeitaufwendige Angelegenheit. Nur sie führen allerdings zu glaubhaften Objektbewegungen: Körper können mit anderen zusammenprallen, aufgrund von Reibung zur Ruhe kommen etc.
Je komplexer der Körper in seiner Gestalt, desto aufwendiger ist seine Kollisionsberechnung. Es gibt deshalb in diesem Auswahlmenü einige schnell zu berechnende Ersatzformen, die über das tatsächliche Objekt gestülpt werden können. In der Simulation lässt sich von weiten oft gar nicht erkennen, ob jetzt die tatsächliche Objektgestalt zur Kollisionsberechnung herangezogen wurde oder z.B. nur ein automatisch auf die Objektgröße angepasster Quader.
Die Reihenfolge bzgl. Rechengeschwindigkeit und Kollisionspräzision ist ungefähr diese (von schnellster/unpräzisester zu langsamster/präzisester): Quader, Kugel, Konvexe Hülle, Dreiecksmesh. Im einzelnen:
Auto
Sollte Cinema 4D feststellen, dass die Grundobjekte Würfel und Kugel verwendet wurden, so werden diese intern automatisch mit den Optionen Quader und Kugel berechnet. Ansonsten wird Konvexe Hülle verwendet (die voreingestellte Geometriegenauigkeit 5 wird für die meisten Fälle ausreichen und wird immer noch sehr schnell auf Kollision geprüft).
Achtung, Auto gibt es nur bei Rigid Bodies, nicht bei Kollisionsobjekten!
Dreiecksmesh
Das Tag tragende Objekt wird mit seiner kompletten Form als Kollisionsform definiert, womit diese Option die langsamste, aber bzgl. der Kollision die beste ist, da die exakte Objektform zur Kollisionsberechnung herangezogen wird.
Allerdings kann Konvexe Hülle mit höherer Geometriegenauigkeit oft ähnlich gute Kollisionen, aber wesentlich schneller berechnen.
Hierbei werden eine oder mehrere einhüllende Formen um das Objekt bzw. dessen Teile gelegt, die sich sich ähnlich einer Gummihaut verhalten. Es wird dabei der Parameter Geometriegenauigkeit eingeblendet, mit dem die Anzahl der “Gummihäute” festgelegt wird.
Diese Ersatzformbildung funktioniert übrigens genau wie schon beim Platzierungswerkzeug unter Genauigkeit beschrieben.
Möchten Sie sich die Kollisionsform anzeigen lassen, so aktivieren Sie in den Projektvoreinstellungen im Tab “Simulation” die Option Rigid Body Formen. Dazu müssen Sie die Simulation starten, bzw. vom Startbild ein Bild weiter springen.
Kugel
Als Kollisionsform wird eine in die Objekt-Bounding-Box eingepasste Kugel verwendet.
Quader
Als Kollisionsform wird der kleinste Quader verwendet, der alle Objektpunkte einschließt.
Geometriegenauigkeit[0.00..+∞]
Dieser Parameter wird eingeblendet, wenn unter Kollisionsformen Auto (nur Rigid Bodies) oder Konvexe Hülle ausgewählt ist (s.a. Konvexe Hülle).
Mit zunehmenden Werten hier nähert sich die Kollisionsform der eigentlichen Objektform an ohne diese allerdings exakt zu erreichen: die Berechnung geht aber wesentlich schneller vonstatten als bei Dreiecksmesh.
Bei einem Wert von 0 werden zurückspringende Einbuchtungen bzw. Aussparungen oder Löcher nicht in die Kollisionsberechnung mit aufgenommen, sondern nur eine einzelne “Gummihaut” um das Objekt gelegt, wie links gezeigt:
Dieses Attribut findet man auch beim Kollisionspartner. Denken Sie daran, dass diese Felder in den beiden Tags in Beziehung zueinander stehen. Beispielsweise besitzt ein Stück Nylon immer denselben Federungswert. Wenn das Nylon mit zwei Objekten kollidiert, eines davon aus Stoff, das andere aus Beton, bleibt der Federungswert des Nylons derselbe. Allerdings besitzen die beiden anderen Objekte völlig verschiedene Federungswerte. Vom Beton wird das Nylon kaum bis gar nicht abgefedert, der Stoff jedoch lässt das Nylon relativ stark abfedern.
Dieses Attribut findet man auch beim Kollisionspartner. Denken Sie daran, dass diese Parameter in den beiden Tags in Beziehung zueinander stehen. Die Oberfläche, mit der z. B.ein Stoffobjekt kollidiert, kann unterschiedliche Reibungswerte besitzen. Beispielsweise besitzt ein Stück Nylon immer denselben Reibungswert. Wenn das Nylon mit zwei Objekten kollidiert, eines davon ein Fels, das andere ein Eisblock, bleibt der Reibungswert des Nylons derselbe. Allerdings besitzen die beiden anderen Objekte völlig verschiedene Reibungswerte. Der Eisblock verursacht so gut wie keine Reibung, während der Fels bei einer Kollision mit dem Nylon relativ viel Reibung erzeugt.
Dieses Attribut findet man auch beim Kollisionspartner. Denken Sie daran, dass diese Parameter in den beiden Tags in Beziehung zueinander stehen. Hat beispielsweise eine der beiden Einstellungen den Wert 0, so ist die Gesamtklebrigkeit ebenfalls 0.
Hier können Sie einstellen, von welcher Polygonseite aus auf Kollisionen geprüft werden soll. Physikalisch korrekt wäre Beide. Allerdings kann es bei komplexeren Kollisionen zu Durchdringungen kommen, die durch diese Einstellung nicht mehr zu beseitigen wären. Stellen Sie sich z.B. ein T-Shirt im Achselhöhlenbereich eines laufenden Charakters vor: es kann passieren, dass Teile des T-Shirts in die Charaktergeometrie hinein gedrückt werden. Wenn Sie hier jetzt Vorne einstellen, ist die Möglichkeit gegeben, dass sich der Stoff wieder aus dem Charakter heraus bewegen kann, da ja die Kollision von hinten deaktiviert ist. Zusätzlich wird sogar ein kleiner Impuls aus der Oberfläche heraus angelegt, um eventuelle Kollisionsdurchdringungen besser zu beseitigen.
Hinten würde sich beispielsweise anbieten, wenn sie eine Kugel in einer größeren Kugel einschließen.
Ausschlaggebend für die Richtung sind die Polygonnormalen: Vorne ist dort, wo die Polygonnormale hin zeigt.
Flüssigkeitskollision
In folgendem Beispiel sehen Sie Flüssigkeitspartikel in einem Zylinder: links im Modus Oberfläche und rechts Volumen. Letzteres ist im wahrsten Sinne des Wortes wasserdicht, während linker Hand einige Flüssigkeitspartikel “ausbrechen”.
Kollisions-Objekte können ja mit einer Menge an Elementen kollidieren: z.B. Rigid Bodies, Soft Bodies, Partikel etc. Je nach Elementtyp kann die Kollision auf verschiedene Arten berechnet werden. Im Zusammenspiel mit der Flüssigkeitssimulation haben Sie 3 Modi:
- Oberfläche: Es wird eine entsprechende Oberfläche angenommen, durch die die Flüssigkeitspartikel nicht durchdringen sollen. Beachten Sie dabei, dass die oben beschriebenen Parameter Kollisionsform und Kollisionsseite ausgewertet werden! Beachten Sie, dass dieser Modus nicht so präzise ist wie das im Folgenden beschriebene Volumen und es zu Durchdringungen - besonders bei schnellen Partikeln/Kollisions-Objekten - kommen kann. Allgemein gut funktioniert Oberfläche, wenn die Flüssigkeitspartikel nur kurz kollidieren (“abprallen”) und sich dann von der Oberfläche wegbewegen. Soll die Flüssigkeit dauerhaft mit dem Kollisionsobjekt in Kontakt bleiben, ist der folgende Modus Volumen besser geeignet.
Oberfläche ist gegenüber Volumen in den meisten Fällen schneller in der Berechnung (Ausnahme: Grundobjekte Würfel oder Kugel).
Beachten Sie, den davor angeordneten Parameter Kollisionsseite entsprechend zu setzen! - Volumen: in diesem Modus wird zu einem Trick gegriffen: anstatt Partikel auf die Kollision mit einer Oberfläche zu überprüfen, wird die Kollisionsgeometrie mittels eines volumetrischen, durch Voxel gebildeten Abbildes ersetzt und zur Kollisionserkennung herangezogen (mehr Details dazu finden Sie unter Voxelisierung). Volumen rechnet präziser - aber langsamer - als Oberfläche und ist in der Lage, im wahrsten Sinne des Wortes “wasserdichte” Kollisionsobjekte zu simulieren. Verwenden Sie diesen Modus, wenn Sie Flüssigkeiten in Behältern simulieren wollen: z.B. Rotwein im Glas, schwappendes Wasser im Kanister etc. Diese Option arbeitet am besten mit Objekten, die ein Volumen aufweisen. Hier ist eindeutig, wo innen und außen ist. Es können aber auch unvoluminöse (z.B. eine Scheibe) Objekte bzgl. Kollision voluminös gemacht werden: mit der Einstellung Bei offener Geometrie werden diese intern in ein voluminöses Kollisionsabbild konvertiert.
- Aus: Hiermit schalten Sie den Modus aus. Es erfolgt keine Kollisionsabfrage mit Flüssigkeiten, mit anderen Elementen (z.B. Rigid Bodies) aber je nach Einstellungen schon.
Volumen brauchen, um gut zu funktionieren, auch ausreichend davon. Dünne Kollisionswandungen arbeiten nicht so gut, es kommt da schnell zu Durchdringungen. Beachten Sie, dass die Verwendung von unsichtbaren (= nicht gerenderten), dickwandigen Kollisions-Ersatzobjekten oft ein gutes Hilfsmittel sind.
Hier legen Sie fest, von welcher Seite aus Flüssigkeitspartikel mit dem Volumen kollidieren können. Sie haben folgende Auswahlmöglichkeiten:
- Außen: Kollision findet statt, wenn Partikel von außen auf die Kollisionsoberfläche treffen. Das ist der Normalfall.
- Innen: Kollision findet statt, wenn Partikel von innen auf die Kollisionsoberfläche treffen (z.B. eine mit Wasser gefüllte Glaskugel).
- Beide: Kollisionen finden sowohl beim Auftreffen von außen, als auch von innen statt. Dieser Modus ist allerdings weniger robust als die anderen beiden, was in Durchdringungen resultieren kann!
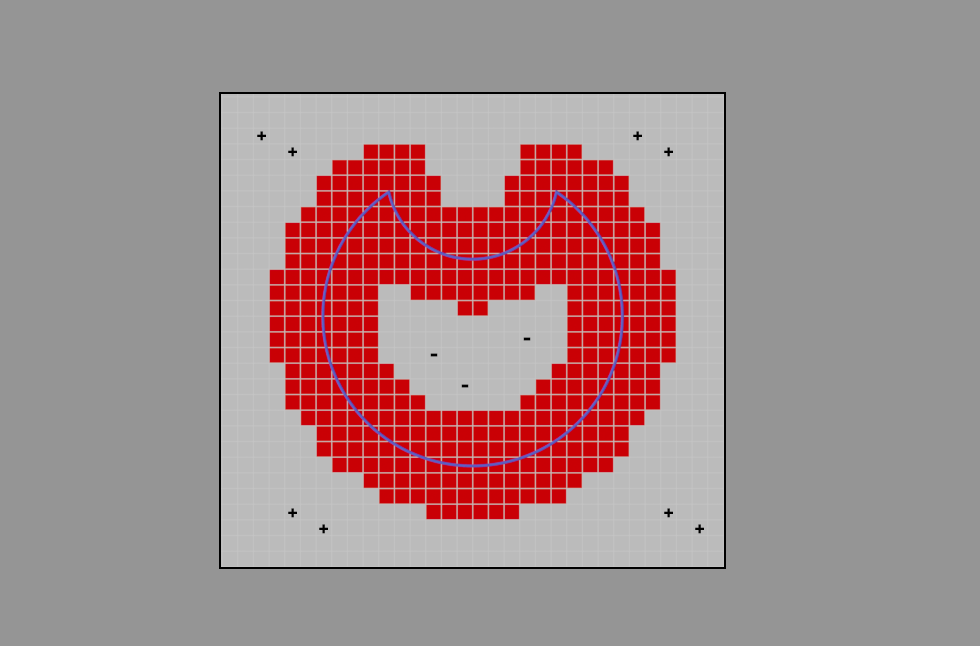 Ein Querschnitt durch eine Kollisionsoberfläche (blau) im Modus Außerhalb (bei Modus Innerhalb wären die Plus- und Minuszeichen vertauscht).
Ein Querschnitt durch eine Kollisionsoberfläche (blau) im Modus Außerhalb (bei Modus Innerhalb wären die Plus- und Minuszeichen vertauscht).
Hier einige Details zu dem Modus Volumen, diese werden Ihnen helfen, die nächsten beschriebenen Parameter besser zu verstehen. Sie sehen in der Abbildung in blau die Kollisionsoberfläche eines Objekts. Die schwarze, quadratische Umrandung ist eine Kollisions-Bounding-Box. Diese ist nicht identisch mit der bekannten Objekt-Bounding-Box, sondern etwas größer. Um die Kollisionsoberfläche werden jeweils innen und außen mehrere Schichten Voxel (rot) angelegt (allgemeine Details zu Voxeln finden Sie hier). In jedem roten Voxel ist die Distanz zur nächstliegenden Kollisionsoberfläche gespeichert.
Außerhalb der roten Voxelschichten befinden sich innerhalb der Kollisions-Bounding-Box ebenfalls Voxel, die allerdings nur die Eigenschaft “Innerhalb” (+) und “Außerhalb” (-) gespeichert haben. Der Bereich des +-Zeichens gibt den Raum an, in dem sich Flüssigkeitspartikel bewegen können.
Sobald jetzt Flüssigkeitspartikel in die Kollisions-Bounding-Box eintreten, können Kollisionen sehr präzise festgestellt werden.
Oben stehende Beschreibung gilt für alle Mesh-Objekte außer den Grundobjekten Würfel und Kugel, die ohne Voxel arbeiten. Deren Volumenrepräsentation ist mathematisch definiert, was präziser, schneller und mit weniger Arbeitsspeicher funktioniert. Durch die Verwendung dieser beiden Objekttypen könnten Sie also Resourcen sparen.
Beim Parameter Voxelisierung wählen Sie aus, wie die Voxelgröße bestimmt werden soll:
- Relativ: hier wird ein Prozentsatz der längsten Objekt-Bounding-Box-Seite verwendet.
- Absolut: hiermit kann die Voxelgröße absolut in Zentimetern eingegeben werden.
Je nachdem, was Sie bei Voxelisierung definiert haben, geben Sie hier die Voxelgröße in einem Prozentsatz der größten Bounding-Box-Länge an oder absolut in Zentimeter.
Je kleiner die Voxelgröße, desto besser kann das Kollisions-Mesh nachgebildet werden, desto aufwendiger ist aber auch meist die Berechnung und umgekehrt. Zu große Voxel führen zu Undichtigkeiten, also Durchdringungen.
Ganz allgemein gesagt, sollte sich die Voxelgröße ungefähr in der Größenordnung der Flüssigkeitspartikelgröße bewegen, kann aber auch etwas kleiner sein. Die voreingestellte Flüssigkeitspartikelgröße ist 6 cm, also wäre eine Voxelgröße von ungefähr 3-6 cm angemessen. Sie können natürlich aber auch weiter damit herunter gehen, um das Kollisions-Mesh besser nachbilden zu können. Eventuell ist es dann nötig, die Voxelbereiche (s. nächster Parameter) zu vergrößern.
Innerer Voxelbereich[0..2147483647]
Äußerer Voxelbereich[0..2147483647]
Ausgehend vom Kollisions-Mesh werden eine hier definierte Anzahl von Voxelschichten auf der Innenseite (Innerer Voxelbereich) und der Außenseite (Äußerer Voxelbereich) angelegt. Das sind oben in der Abbildung die roten Voxel.
Wenn Sie sehr kleine Voxelgrößen wählen (s. vorherigen Absatz) kann es zu Kollisionsproblemen kommen. Der Grund: die Flüssigkeitspartikel werden zu spät entdeckt, überlappen sich dann, und es kann z.B. zu hüpfendem Verhalten kommen. In solcherlei Fällen kann es helfen, die Voxelbereiche auf der Kollisionsseite zu vergrößern.
Sehr schnelle Flüssigkeitspartikel profitieren ebenfalls von größeren Voxelbereichen!
Anderes Wissenswerten zur Flüssigkeitskollision
- Es kann vorkommen, dass verschiedene Kollisionsmethoden miteinander “ringen”: stellen Sie sich einen auf einer Flüssigkeit treibenden Rigid Body vor, der von der Flüssigkeit gegen ein Kollisions-Objekt gedrückt wird; wer gewinnt? Es könnte hier zu Durchdringungen kommen. Mit dem Parameter Kollisionspriorität () nehmen Sie darauf Einfluss.
- Für den Volumen-Modus gilt: Sollten Sie Flüssigkeitspartikel in einem Minus-Raum erzeugen, werden diese innerhalb der Kollisions-Bounding-Box mit großer Kraft in den Plus-Raum gezogen.
- Das Erzeugen von Voxeln um Mesh-Oberflächen kommt übrigens auch beim Volumenerzeuger (Volumentyp Distanzfeld (SDF) zur Anwendung.
Vorverarbeiten
Sofern Sie unter Kollisionsform Dreiecksmesh definiert haben, können Sie die Geometrie hier intern vorverarbeiten lassen, indem Sie ihr Volumen verleihen. Davon profitiert am meisten der Volumen-Kollisions-Modus, der durch den Modus Wandstärke wirkungsvoll unterstützt wird. Es werden dann Volumen mit einem klar definierten Innen und Außen erzeugt.
Sie haben folgende Auswahlmöglichkeiten:
-
Aus: Hiermit erfolgt keine Vorverarbeitung. Die Geometrie wird so wie sie ist, zur Kollision verwendet. Das kann Flüssigkeitskollisionen mit Objekten, die kein Volumen einschließen (z.B. einer Scheibe) schnell zu Problemen (= Durchdringungen) führen!
Es gibt hier einige Ausnahmen, wie z.B. das Grundobjekt Ebene, das bzgl. Kollision intern als Würfel verarbeitet wird. Machen Sie dieses bearbeitbar, werden diese Sonderregeln allerdings abgeschaltet - aber das nur nebenbei. -
Wandstärke:
Hiermit machen Sie aus jedem Objekt, die nur aus einer Polygonschicht aufgebaut ist, ein Volumen. Intern funktioniert das wie der Wandstärke-Generator. Die Wandstärke definieren Sie dabei mit unten beschriebenem Parameter Dicke.
In obigem Video sehen Sie ein rotes, sich schnell bewegendes Kollisionsobjekt, das mit Flüssigkeitspartikeln kollidiert. Links steht Bei offener Geometrie auf Aus, rechts auf Wandstärke. Rechter Hand funktioniert die Kollision einwandfrei, während es linker Hand zu massiven Durchdringungen kommt.
-
Löcher schließen: Hiermit schließen Sie Löcher im Mesh. Zur Definition: Löcher sind dort, wo es Randkanten gibt: Polygone, die an einer Seite keinen Anschluss haben. Darunter fällt zum Beispiel eine Halbkugel aus einem einwandigen Polygon-Mesh, nicht aber eine Halbkugel deren Wände eine Dicke von beispielsweise 1cm haben.
Hiermit legen Sie fest, wie dick die erzeugte Wandstärke ausfallen soll. Je dicker diese definiert wird, desto genauer und sicherer wird die Kollisionsberechnung ausfallen.
Je höher Sie Dicke einstellen, desto sichtbarer wird allerdings auch der Abstand zwischen den Kollisionspartnern. Deshalb kann mit Position die Wandstärke nach innen (negative Werte) und außen (positive Werte) verschoben werden, bis es optisch wieder passt.
Laden Sie dazu obige Szene und variieren Sie Position. Schalten Sie auf die Kamera “Position”. In Bild 5 lässt sich dann sehr schön der Effekt dieses Parameters beobachten.
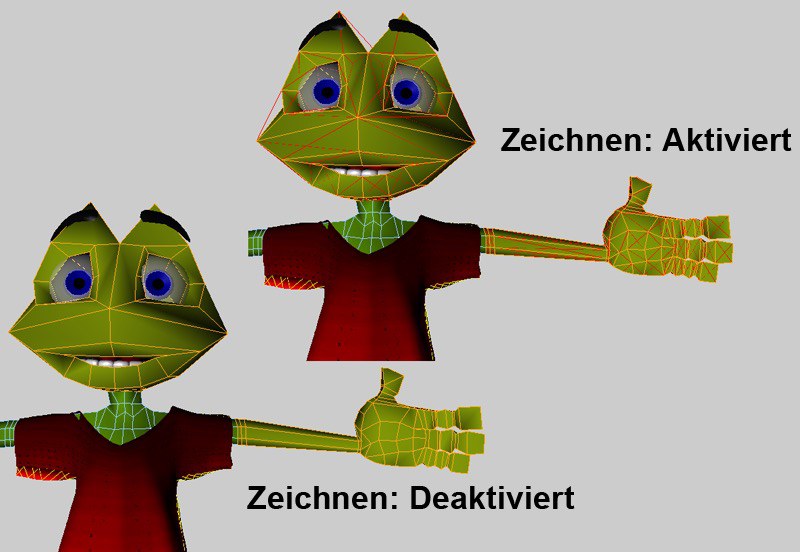
Polygone ausschließen
Dieser Befehl schließt alle selektierten Polygone von der Kollisionsberechnung aus.
Hiermit werden sämtliche ausgeschlossenen Polygone wieder bei der Berechnung berücksichtigt.
Hat man einmal eine andere Polygonauswahl getroffen, so kann man sich mit diesem Befehl schnell wieder die ausgeschlossenen Polygone anzeigen lassen. Die aktuelle Polygonselektion wird dabei überschrieben.
Ist diese Option aktiviert, werden im Editor alle ausgeschlossenen Polygone mit roten Kanten angezeigt. Intern wird das Kollisionsobjekt immer in Dreiecke unterteilt, sodass die ausgeschlossenen Polygone trianguliert dargestellt werden. Das Deaktivieren dieser Option blendet die Polygone im Editor wieder aus.