Collision
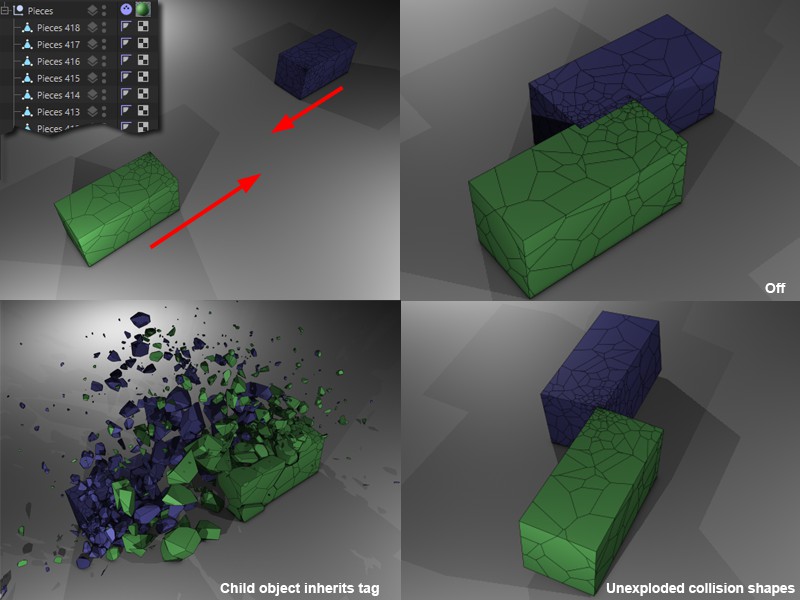 The hierarchy shown at top left (the tag is applied to the parent Null Object) collides with one of the same type. The remaining images depict different Hierarchy settings.
The hierarchy shown at top left (the tag is applied to the parent Null Object) collides with one of the same type. The remaining images depict different Hierarchy settings.
This option applies when the object to which the tag has been assigned has its own hierarchy (and is not a clone-generating object, for which the next selection menu applies) and it defines whether or not a hierarchy (if present) below the object with the tag should also be included as a collision object.
All hierarchies belonging to the tag will be ignored with regard to Dynamics. Only the object with the tag will collide but whose Dynamic movement will "drag" Child objects with it.
This tag is assigned to all Child objects. They will then all behave independently, as if they weren't part of a hierarchy.
The entire hierarchy of the object to which the tag is assigned will be seen as a single, fixed object.
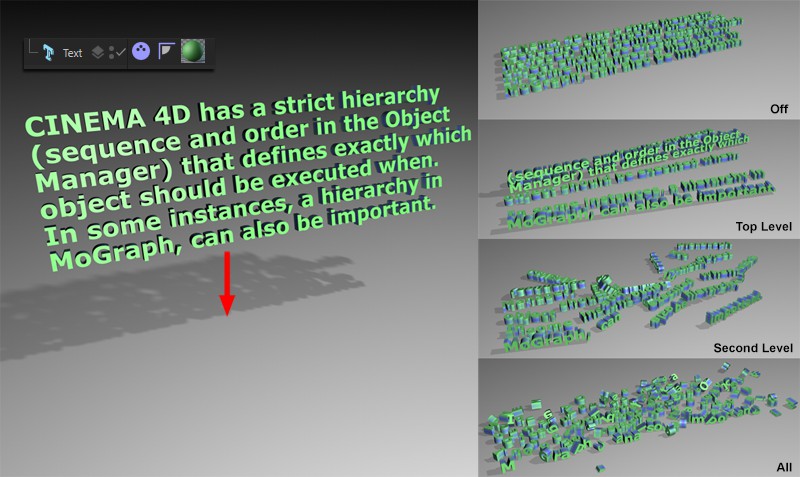 The Text object at left falls to the floor. Depending on the Individual Elements setting, the text will collide as a whole, as lines, as words or as letters.
The Text object at left falls to the floor. Depending on the Individual Elements setting, the text will collide as a whole, as lines, as words or as letters.
This parameter's modes are designed for Generators that themselves generate objects, such as the Text. It depends on how the objects should collide: independently or as a whole.
For the MoGraph Text, for example, the following applies with regard to text collision:
The entire Text object will be a collision object.
Each line of text will be an individual collision object.
Each word will be an individual collision object.
Each letter will be an individual collision object.
This option is used to adjust the following:
- For Soft Body deformations, a query will be made for intersecting object. Disabling this option will help optimize render speed. This should only be done if the object does not have a tendency to self-collide as a result of its shape or of its parameters (e.g., as with tires, balloons, etc.).
- If the tag is assigned to a clone-generating object (Cloner object, Text object, etc.), this option defines the collision detection between individual objects.
Colliding objects can be deformed using Deformers, which of course affects the collision shape. Occasionally (e.g., with the Voronoi Fracture object, which can be deformed using its Details tab's settings) a deformation can be minor and additional non-deformed objects have to be used in order to speed up a collision process. If this is the case, this option should be disabled.
Generally speaking, collision detection is a computationally time-consuming process but is does result in realistic object behavior: objects can be repelled, come to rest due to friction, etc. The more complex a shape, the more computationally time-consuming the collision detection will be. This is why this menu offers substitute shapes that can be placed around the collision object. This can save a great deal of render time. At a distance it is often very difficult to discern whether or not the actual object or a substitute object is being used for collision detection during an animation. The available shapes can be found in the Collision tab's Collision Shapes options menu.
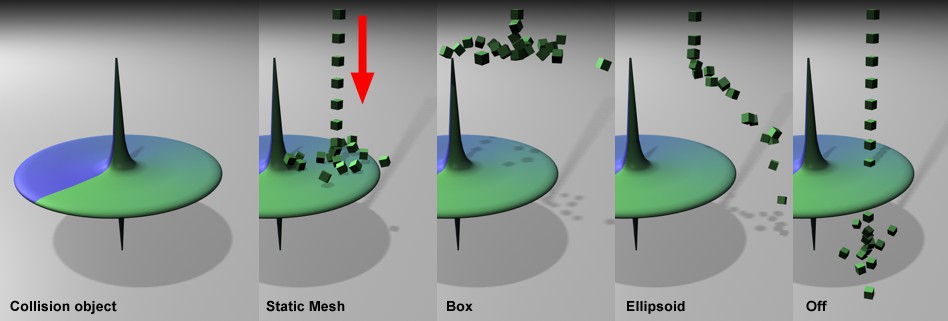 At left, clones collide with a collision object. The clones are repelled differently, depending on the option defined in the Shape menu.
At left, clones collide with a collision object. The clones are repelled differently, depending on the option defined in the Shape menu.
The available substitute shapes in order of render speed - fastest to slowest - are: Box; Ellipsoid; Cylinder, Convex Hull; Static Mesh; Moving Mesh.
The following applies for the modes below: Automatic] is always good to use, optimizing render time is possible with the remaining modes. <CYCLE_ID RIGID_BODY_SHAPE_DEFAULT> Automatic </CYCLE_ID> The modes listed below (and several more, e.g., the Floor object has its own analogy) will be assigned internally - automatically, depending on the object used. For example, primitives will automatically be assigned a mode: a cube will be assigned the [[Box mode, a polygonal object the Static Mesh or Convex Hull mode, etc. The most optimal mode for the corresponding object will automatically be selected. Changing to a different mode might also help you save render time. If, for example, you are working with several small, spherically-shaped objects they will automatically be assigned the Convex Hull] mode but you could just as well apply the Ellipsoid mode, which will render much faster but barely differ visually.
This is mainly a compatibility setting for loading older scenes (it will apply Static Mesh instead of Convex Hull to corresponding objects).
Is equivalent to the object's bounding box, which encompasses the object in its maximum outer dimensions.
An Ellipsoid ("volumetric" oval) that fits within the object's bounding box will be fitted into the colliding object. For a cube, for example, this would be a sphere that touches all six sides of the cube.
These three settings are primarily designed for use with tire collision shapes. An (internally optimized) cylinder collision object will be fitted into the tag object's bounding box. All you have to do then is select the matching axis. Finally, define the rotational axis if your tire model as the rotational axis of the cylinder.
A type of rubber skin will be placed around the object. Indentations, cavities or holes will not be included in the collisions.
Aside from Static Mesh, this is the only mode that uses the actual object geometry and not a simplified version. The given object will constantly be checked for collisions in its entirety, even while it's moving.
Note that this mode will calculate more slowly and also comes with additional problems (e.g., intersection, objects can "clump", etc.). If problems occur, we suggest selecting the Another Object option on conjunction with a simple substitute object.
This is the most time-consuming mode, next to Moving Mesh, for rendering because the object's actual geometry is used (and not a simplified version).
All objects actively affected by Dynamics (

) will, however, be seen as static (non-moving) collision objects. The name Static Mesh can be taken literally. This mode should also be used when, for example, a sphere should be calculated as hollow and dynamics objects bounce around on the inside.
The body will not collide at all. All dynamic objects will pass through the body.
Lets you assign a substitute collision object. Let's say you are working with a hi-res object made up of millions of polygons and only a specific region of the object should be used for collision. calculating this would be very laborious. If, however, you use a substitute object that only roughly matches the shape of the original object and is made up of only a few hundred polygons, the calculation can be sped up enormously. If this option is selected, a link field will be made available in which the substitute object can be placed. Note that the location of the substitute object plays no role - when selected as such, the object will automatically be positioned at the origin of the original object.
The substitute object's (internal) collision shape in turn adheres to the rules described above (if the object has not Dynamics Body tag its Shape should be set to Automatic). You can also assign a Dynamics Body tag to the substitute object in order to more accurately define the shape. You can also disable the Enabled option.
Drag the substitute collision object into this field (see previous parameter).
Use this value to increase (positive values) or decrease (negative values) the size of the collision field of the object (in contrast to the next parameter, Margin, the object shape will be maintained). This parameter is designed for creating specific effects. For example, a brick wall whose bricks float with gaps between them but it still behaves like a real wall. This parameter can also be applied when, for example, creating visible penetration of an object if you want to avoid having to increase the Steps per Frame value.
You normally don't have to modify these settings. The Margin parameter reflects the scene-wide setting for Collision Margin, only that you can define it here at object level.
The value can also be reduced to 0, which will reduce render time but also reduce stability. Very low Margin values can also lead to an object being penetrated.
Higher values are generally recommended if faulty rendering and/or incorrect collisions take place. It can, however, also help to increase the Steps per Frame value.
Generally speaking, the edges of Primitives will be rounded.
Contrary to the Size Increment parameter, the Margin parameter serves only optimize the stability of Dynamics.
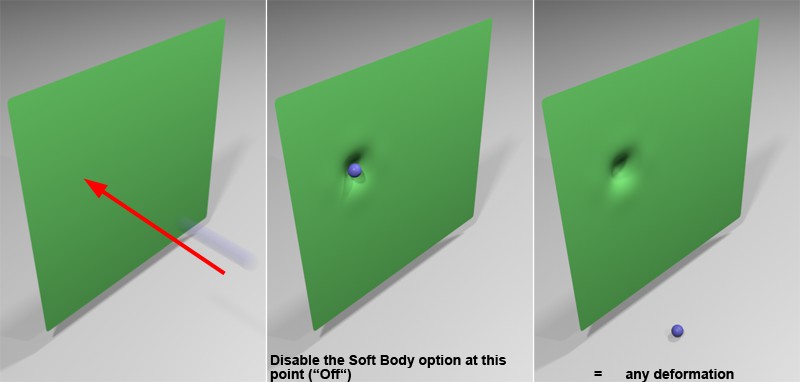 If enabled, a Soft Body can be turned into a deformed Rigid Body. Soft Bodies tend to smooth dents out again.
If enabled, a Soft Body can be turned into a deformed Rigid Body. Soft Bodies tend to smooth dents out again.
This option is, for example, suited for maintaining dents in hard surfaces (actually the opposite of what a Soft Body does). This option does nothing more than freeze the deformed shape of a Soft Body when you set Soft Body from Made of Polygons/Lines to Off. What remains is a deformed Rigid Body.
When two objects collide, this value is the measure of force with which the objects bounce off of each other. Values around 0 result in a non-elastic bounce - like two plastic spheres colliding. Values around 100% result in a much more pronounced bounce, e.g., like two billiard balls colliding.
Physically correct values range between 0% to 100%.
Note that there are always two values - one for each colliding object. For example, a floor also has a certain elasticity, i.e., if one of the collision objects has a Bounce value of 0, the second won't bounce off, even if it is assigned a value of 1000%.
If you have several objects that collide with each other, lower values will result in all objects coming to a rest sooner.
Physics basically offers three types of friction:
- Static friction
- Kinetic friction
- Rolling friction
Static and kinetic friction are combined in a single parameter in Cinema 4D, Friction. The Friction parameter is the measure of braking force an object encounters when it slides across a surface/object or of the force that makes a stationary object begin to slide across a surface/object. Both types of friction are equal in measure. Note that two objects are always involved in a friction equation, each of which can have a different friction value defined. If one object has a value of 0%, the friction for the other object cannot be increased no matter how high its value.
Generally speaking, the higher the value (can also be much greater than 100%) the less the given object will slide or the more it will roll or tumble. If you have several objects that collide with each other, lower values will result in all objects coming to a rest sooner.
Cinema 4D purposely does not include rolling friction. This can, however, be simulated using Angular Damping.
Collision behavior. Imagine several objects are dropped onto the floor and their collision behavior is the same throughout. This would not look realistic at all.
The greater the Collision Noise value, the more varied the behavior of individual objects will be.