El Sistema de Simulación
General
Con la introducción de una nueva tecnología de simulación, Maxon sienta las bases de un nuevo sistema de dinámica en Cinema 4D. Se trata de un sistema capaz de calcular todos los tipos posibles de comportamiento físico, como la simulación de cuerpo rígido/suave, ropa y spline ("cuerda"). Además, a esta categoría pertenece también el sistema Pyro, que permite simular humo, fuego y explosiones.
Actualmente, todas las etiquetas que se encuentran en el menú de Etiquetas de Simulación funcionan con el nuevo sistema de simulación:
-
Los cuerpos rígidos son objetos sólidos indeformables que siguen las leyes de la gravedad y la colisión. Pueden asignarse a objetos poligonales y a generadores de polígonos.
-
Tela, Cuerpo blando, Globo: se pueden asignar a objetos poligonales y generadores de polígonos. Cuerpo Blando y Globo también utilizan la etiqueta Ropa - sólo que con diferentes preajustes.
-
Cuerda (la anterior etiqueta de Dinámica de Splines): Se puede asignar a splines.
-
Conector: Se asigna a los objetos que llevan cuerda o etiqueta de ropa y a los Cuerpos Rígidos y los une entre sí.
-
Cinturón de tela (la anterior etiqueta Cinturón): Se asigna a los objetos a los que se asigna la etiqueta Tela y conecta estos objetos con otros poligonales, no simulados.
-
Cinturón de cuerda (la anterior etiqueta de restricción de pelo): Se asigna a los objetos a los que se asigna la etiqueta de cuerda y conecta estos objetos con otros poligonales, no simulados.
-
Colisión: se asigna a los objetos poligonales no simulados y a los generadores de polígonos que sirven como obstáculos para el sistema de simulación, es decir, los objetos pueden colisionar con ellos y no los penetran.
-
Pyro: asigna objetos poligonales o spline para que sirvan como Emisores de humo y fuego o como zonas de salida para explosiones. Los preajustes de los parámetros proporcionan una generación de humo y llamas.
-
Pyro Fuel: es idéntica a la etiqueta Pyro, excepto que aquí los preajustes ya han sido ajustados para crear explosiones.
El nuevo sistema de simulación Tela/Spline funciona internamente de forma diferente al antiguo sistema. Se diferencia como sigue:
-
Sistema antiguo: El sistema antiguo se basa en impulsos y fuerzas que dan lugar a aumentos de la aceleración y la velocidad. Las masas y los resortes desempeñaron un papel importante.
-
Nuevo sistema de simulación: los puntos de los objetos se conectan con reglas específicas (llamadas restricciones) en función del área de aplicación. Por ejemplo, en el caso de la ropa hay dos tipos principales de restricciones: restricciones de distancia para los puntos conectados por los bordes de la malla y restricciones de flexión para los polígonos adyacentes de la malla. Los primeros tratan de mantener constante la distancia de los puntos, los segundos el ángulo entre los polígonos. Luego están, por ejemplo, las restricciones de contacto que separan suavemente los puntos (o aristas, triángulos) que se acercan demasiado para evitar penetraciones. Para cada imagen de animación, un Solver tiene que conciliar todo esto y posicionar los puntos en consecuencia.
Todo esto parece complicado, pero al final se reduce a las siguientes ventajas: el nuevo sistema de simulación es más rápido (también se puede calcular en la GPU, por ejemplo), más preciso, más realista, más estable y más fácil de usar. Además, con el nuevo sistema se puede hacer lo siguiente
-
La mayoría de los Objetos de la Fuerza de Simulación funcionan.
-
La función Desgarrar no requiere un objeto Superficie Tela.
-
El objeto al que se asigna la etiqueta Ropa ya no tiene que ser poligonal y puede ser incluso un Generador.
-
Para clonar Generadores como array u objeto Clonador, las etiquetas Simular pertenecen a este Generador, a cada clon se le asignan entonces estas propiedades. En las jerarquías ordinarias, cada objeto Hijo debe estar provisto de una etiqueta Simular para participar en la simulación - por lo que aquí se elimina la jerarquía relativa a los movimientos del objeto Padre (no se aplica a la herencia de los Emisores Pyro a los objetos Hijo).
El nuevo Sistema de Simulación también tiene - como es generalmente conocido en los sistemas de simulación - ajustes básicos del Solver, que puede encontrar en "Ajustes del Proyecto/Simulación". Dado que estos preajustes tienen naturalmente un efecto en el comportamiento de la simulación, puede aplicar diferentes preajustes a diferentes simulaciones utilizando varios objetos de Escena de Simulación que tengan los mismos parámetros que los ajustes del proyecto de simulación. A los objetos de la escena de simulación se les pueden asignar diferentes etiquetas, fuerzas, cinturones de tela u objetos de colisión. Las etiquetas asignadas a un objeto de la escena de simulación interactúan entre sí, pero no con las de otro objeto de la escena de simulación.
Trucos y consejos para simulaciones con telas, globos y cuerpos blandos
-
Al principio de una simulación, no debería haber contactos, teniendo en cuenta la configuración de Espesor. De lo contrario, al inicio de la simulación y en un solo fotograma de la animación, todo lo que pueda provocar arrugas o temblores se desplazará fuera de la zona de contacto.
-
Si los cambios de movimiento o deformación son demasiado rápidos o bruscos, pueden producirse penetraciones durante la colisión. En general, ayuda a aumentar la configuración de Subpasos.
-
Con elementos de simulación alejados del origen global, pueden producirse errores de redondeo matemático (las GPUs calculan con 32 bits - en lugar de 64 bits con la CPU), lo que puede manifestarse en un comportamiento extraño de la simulación (por ejemplo, comportamiento diferente de la ropa con los mismos ajustes, por ejemplo, 2 banderas alejadas entre sí ondean de forma totalmente diferente). Aquí hay varias opciones que proporcionan alivio:
- Variar la escala de la escena ( Escalar Escena...).
Escalar Escena...).
- Mueve los objetos implicados en la simulación más cerca del origen del mundo.
- Especialmente en relación con el objeto Fuerza: aumentar la masa de los elementos simulados o de las fuerzas actuantes. También puede ayudar a desactivar Respetar Masa en el objeto Fuerza. -
Por ejemplo, no es fácil controlar el comportamiento físico de los textiles. Los textiles se caracterizan principalmente por su rigidez, o por su falta de ella. Aunque el nuevo sistema de simulación dispone de un ajuste de Flexibilidad, éste depende de una serie de factores que afectan a la rigidez. Se trata, por ejemplo, de los pasos intermedios, las iteraciones (ambos ajustes del proyecto de simulación), la maleabilidad, la elasticidad (prenda o etiqueta de cuerda) y también la densidad de la malla. Por lo tanto, no se pueden hacer afirmaciones generales como"curvatura = 1 y el objeto se comporta como el cuero".
-
La densidad y la distribución de la malla que acabamos de mencionar también tienen una gran influencia en el comportamiento de una simulación.
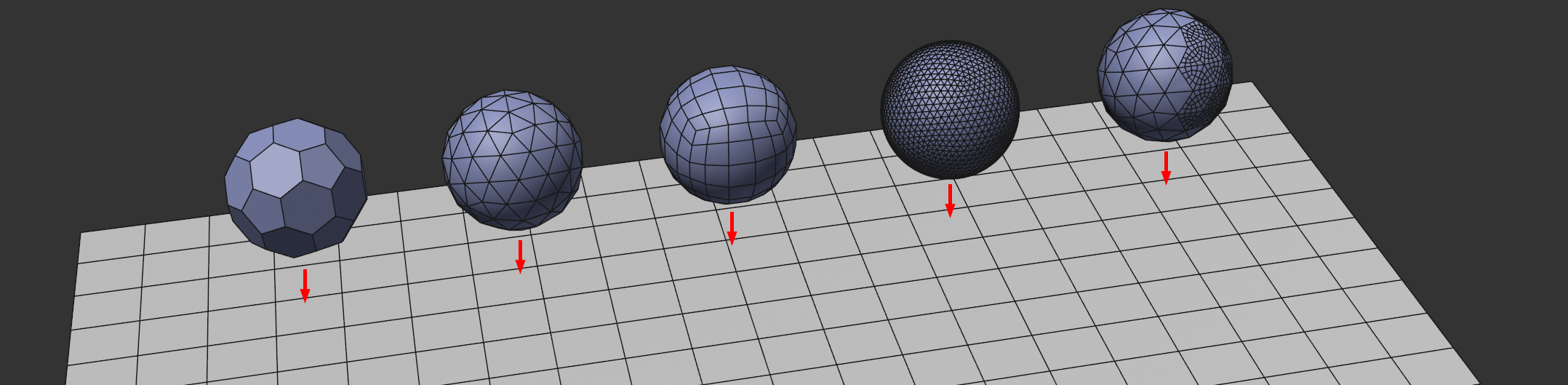
Puede ver en esta imagen 5 esferas con el mismo diámetro, exactamente la misma configuración de la etiqueta Ropa, pero diferentes mallas. Al caer y colisionar con la capa, estos objetos se comportarán de forma completamente diferente. La penúltima esfera con la malla densa se deformará mucho más que las demás; la esfera del lado derecho tiene una densidad de malla mucho mayor, lo que hace que la masa se concentre allí. Esto hará que gire hacia abajo y hacia la derecha cuando toque el suelo.
-
Puede ahorrar tiempo de cálculo si la simulación trabaja con un objeto sustituto (proxy) de baja resolución, mientras que, por ejemplo, el
 Malla Deformador garantiza que la deformación se transfiera a un objeto "belleza" de alta resolución. Observe también la dirección Simular Antes de los Generadores en el menú Preferencias.
Malla Deformador garantiza que la deformación se transfiera a un objeto "belleza" de alta resolución. Observe también la dirección Simular Antes de los Generadores en el menú Preferencias. -
En raras ocasiones, pueden producirse demasiadas colisiones al mismo tiempo y la simulación se detendrá con el correspondiente mensaje de error. En estos casos, debe utilizar una resolución inferior para los objetos implicados en la colisión (o dejar que los objetos proxy de menor resolución colisionen). Alternativamente, puede aumentar el valor Pases en la Configuración del proyecto - el número de colisiones simultáneas disminuirá (véase también Fijación Velocidad).
Limitaciones).
-
La ventaja en la velocidad de cálculo para la tarjeta gráfica (GPU) sólo es perceptible si la simulación es lo suficientemente compleja. Para las escenas más pequeñas en las que sólo se utilizan unos cientos de polígonos, la CPU puede ser más rápida
-
Cuando se calcula utilizando la GPU, el inicio de la simulación puede retrasarse ligeramente. Durante este tiempo, se compila o carga una gran cantidad de datos en la memoria de la tarjeta gráfica. Esto sólo ocurre la primera vez que se inicia.
-
Las simulaciones producirán resultados diferentes en distintos ordenadores. También obtendrá resultados diferentes si calcula la simulación en la CPU o en la GPU (seleccione aquí:Dispositivo). Por lo tanto, siempre debe preparar/cachear las simulaciones si requiere resultados idénticos (por ejemplo, cuando se utiliza una granja de renderizado). Esto se puede hacer para la etiqueta Tela, por ejemplo, en la pestaña Cache.
-
A las simulaciones no les gustan las fuerzas o restricciones fuertes y opuestas. Esto puede dar lugar a fuerzas y movimientos paradójicos. Una posible solución sería, por ejemplo, reducir las fuerzas actuantes. Por ejemplo, puede aumentar la elasticidad de los conectores. Y/o evitar masas muy grandes (y, por tanto, fuerzas de peso demasiado grandes).
-
Al salir de la escena, el resultado de la simulación se borrará de la memoria. La simulación debe calcularse de nuevo. Sin embargo, puedes hornear la simulación para tenerla siempre a mano.
-
Tenga en cuenta que las simulaciones se borran de la memoria al cargar o cambiar a otra escena. Haz que recalculen la escena, si es necesario.
- Variar la escala de la escena (Escalar Escena...).
- Mueve los objetos implicados en la simulación más cerca del origen del mundo.
- Especialmente en relación con el objeto Fuerza: aumentar la masa de los elementos simulados o de las fuerzas actuantes. También puede ayudar a desactivar Respetar Masaen el objeto Fuerza.
.