Dynamiques
Cette option active ou désactive complètement la propriété. Si elle désactivée, cela revient à ne pas avoir de propriété de tout. L'objet auquel elle est assignée n'existera pas pour la Dynamiques.
Si la propriété est attribuée à un objet générateur de clones (par exemple, objet Cloneur, objet Détacher, etc.) et que Éléments individuels n'est pas réglé sur Off, une sélecion MoGraph peut être utilisée pour exclure les clones individuels des options à gauche.
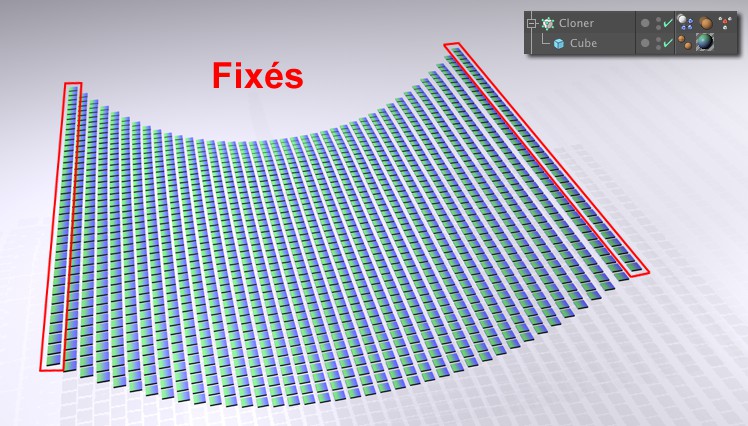 Une sélection MoGraph avec Dynamiques.
Une sélection MoGraph avec Dynamiques.
Cela est particulièrement approprié pour fixer certaines zones de constructions clonées qui sont calculées comme des Corps souples (option Corps souple Constitué de clones).
Les options suivantes peuvent être définies dans le menu de sélection:
Les objets dynamiques obéiront aux commandes de Ligne temporelle et pas à Dynamiques. La détection de collision aura cependant toujours lieu.
Les objets dynamique obéiront aux commandes Dynamiques (et pas aux commandes Ligne temporelle, comme avec l'option précédente). Vous pouvez animer avec les paramètres On et Off et la Temps de transition (décrite ci-dessous) sera introduite ou supprimée.
Les collisions seront enregistrées dans ce mode mais aucune collision n'aura lieu (avec rebond). Les objets dynamiques passeront simplement par ces objets. Alors, à quoi sert-il?
Par exemple, vous pouvez utiliser un corps pour déterminer s'il contient des objets dynamiques (par exemple, avec le Noeud de collision dynamique qui contient un port Fantôme).
Ou si le paramètre Déclencher de la propriété Dynamiques est réglé sur Sur collision, l'impact avec un tel objet sera compté comme une collision et aura bien lieu.
Il arrive souvent d'avoir une scène, par exemple avec un mur de brique/pierre dans lequel les briques sont trop proches les unes des autres, que vous voulez corriger simplement en laissant la simulation tournée pendant un moment jusqu'à ce que tous les éléments soient "fixés". Cet état doit ensuite être utilisé comme l'état de départ (bien sûr, cela fonctionne également avec les Corps souples). C'est exactement ce qui est fait avec ces deux boutons. Laissez la simulation tourner un moment, arrêtez la simulation et cliquez sur le bouton Régler l'état initial. Intérieurement, cet état sera sauvegardé comme l'état de départ. Vous pouvez maintenant aller au cadre 0 et recommencer la simulation.
Supprimer l'état initial fera exactement cela et, par exemple, remettra au cadre 0 l'état définit (par exemple, par un objet Cloneur).
Si vous voulez afficher la visualisation via les paramètres de Projet (Dynamiques /Visualisation) vous pouvez définir au niveau de la Propriété si les objets/clones de la propriété et leurs effets sont affichés.
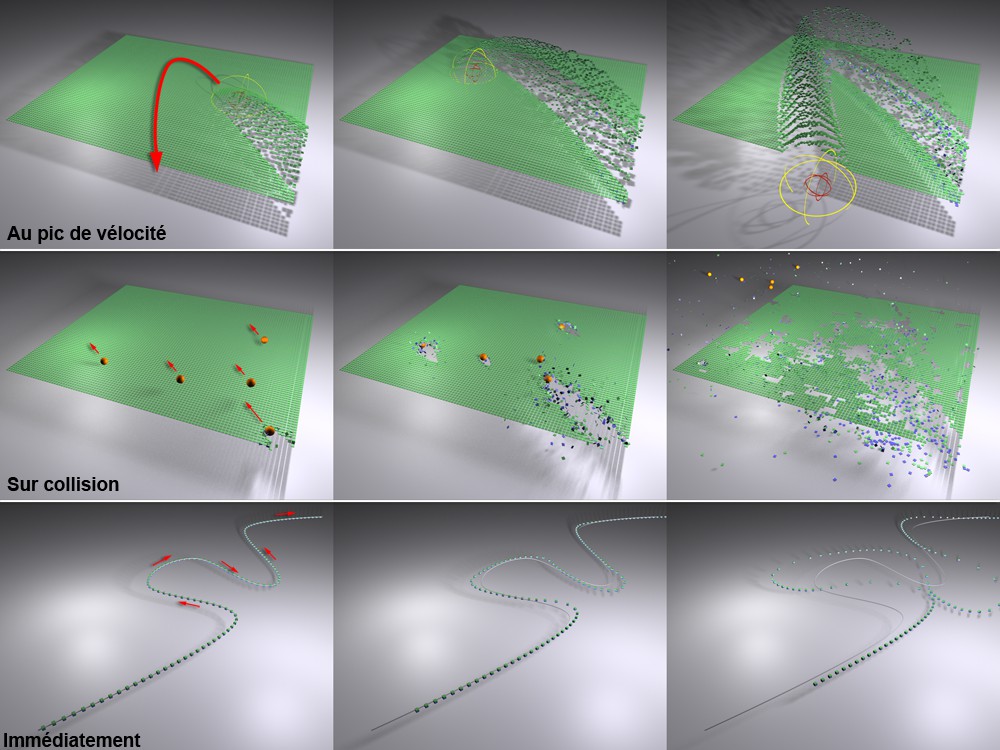 Différents modes Déclencher donnent des effets différents.
Différents modes Déclencher donnent des effets différents.
A l'aide de ce paramètre, vous pouvez déterminer le point où Dynamiques doivent affecter les objets dynamiques. Dès que Dynamiques prend effet, les objets dynamiques seront sous contrôle dans l'ensemble. L'influence étendue des paramètres d'objets initiaux est ensuite enlevée. Bien sûr, l'effet de Dynamics peut être arrêté et les objets dynamiques retourneront à leur position initiale ou animation-clé.
Dynamiques prendra effet de suite. Dès que l'animation est lancée, les objets dynamiques commenceront par exemple à tomber. Si des objets dynamiques sont animés de manière classique via la Ligne temporelle, la vélocité avec laquelle ils tombent lorsque Dynamiques prend effet (Activée peut être définie librement) sera appliquée à leur vélocité initiale.
Pour les objets dynamiques animés (voir les paramètres précédents), Dynamiques prendra effet lorsque les objets dynamiques auront atteint leur vélocité maximum. La vélocité linéaire et angulaire par objet et le cadre d'animation seront comparés. Si une vélocité qui ne dépasse pas la première mais qui est inférieure d'au moins 0.5% est mesurée, l'objet correspondant sera affecté. Cela signifie que l'algorithme ne peut pas voir si un cadre d'animation consécutif contiendra une plus grande valeur de vélocité et commencera donc l'effet lorsque la vélocité maximum sera atteinte en premier. Les objets dynamiques entreront dans le calcul Dynamiques à l'aide de la vélocité maximum.
Dynamiques affectera en premier les objets dynamiques lorsqu'ils se heurteront à un objet clone auquel une propriété Dynamique de corps est attribué. Avec le paramètre suivant Déclencher seuil de vélocité, vous pouvez définir le degré de contact requis pour que l'effet se manifeste.
Déclencher seuil de vélocité[-∞..+∞m]
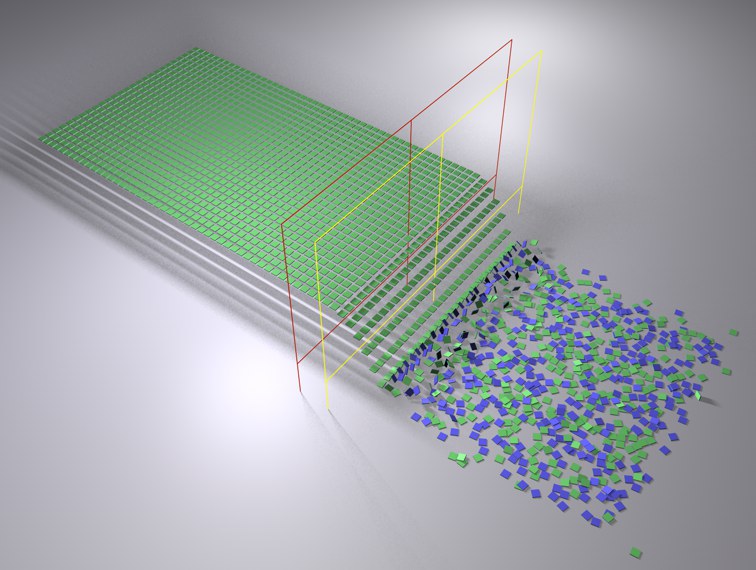
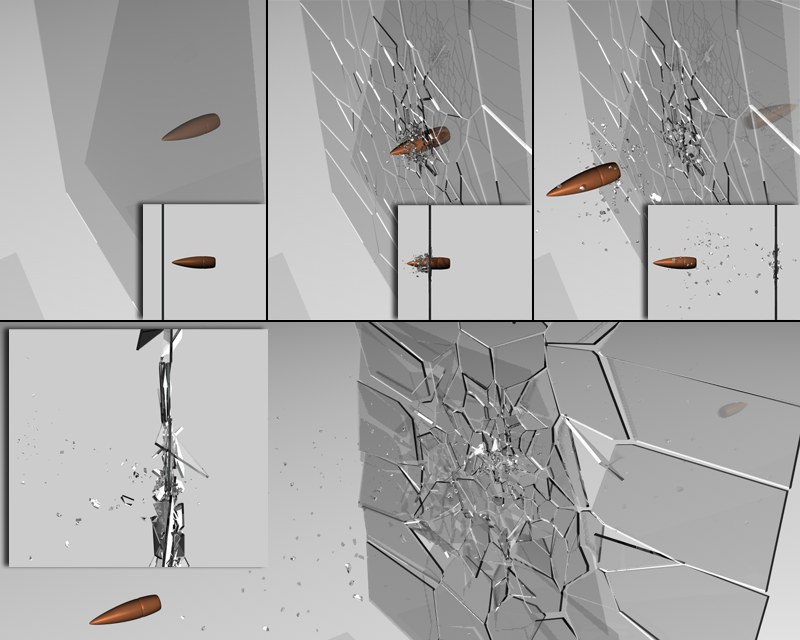 Le Déclencheur seuil de vélocité assure que seuls les éléments avec lesquels une collision a lieu seront affectés. En bas, une valeur trop élevée - toute la fenêtre en verre est brisée.
Le Déclencheur seuil de vélocité assure que seuls les éléments avec lesquels une collision a lieu seront affectés. En bas, une valeur trop élevée - toute la fenêtre en verre est brisée.
Le Déclencheur seuil de vélocité assure que seuls les éléments avec lesquels une collision a lieu seront affectés. En bas, une valeur est trop élevée. L'ensemble de la fenêtre en verre est brisé.
Si Déclencher est réglé sur Collision, vous pouvez définir cette valeur. Plus la valeur est grande, plus la vélocité requise avant que la collision ne prenne effet est élevée. Le facteur décisif est la vélocité dans la direction des Normales de la surface, c'est-à-dire si un objet se déplaçant à une grande vélocité ne fait que bombarder un objet, la collision peut n'avoir absolument aucun effet.
L'exemple ci-dessous a été créé avec l'aide du plugin "Xplode", qui est conçu pour couper un objet en plusieurs petites pièces.
En utilisant la commande Déclencher du noeud Statut des dynamiques du corps, vous pouvez déclencher des dynamiques depuis XPresso.
Vélocité initiale personnalisée
Dès que Dynamiques commence à affecter les objets dynamiques, ils peuvent se voir attribués n'importe quelle Vélocité linéaire initiale désirée. Par exemple, dès qu'un objet dynamique touche, même légèrement, un autre, ce dernier peut programmé pour être repoussé avec une grande vélocité. La vélocité initiale (animée) ne sera PAS incluse dans le calcul. Seule la Vélocité linéaire initiale sera appliquée.
Cela peut, par exemple, être utilisé pour créer des chaînes de réaction comme celle que voyez dans ces expériences élaborées sur les pièges à souris. Dans l'exemple suivant, chaque clone s'est vu attribué une Vélocité linéaire initiale le long de l'axe Y (vers le haut). Déclencher. Si un autre clone est lâché au centre de la construction, la réaction en chaîne sera déclencher sur:
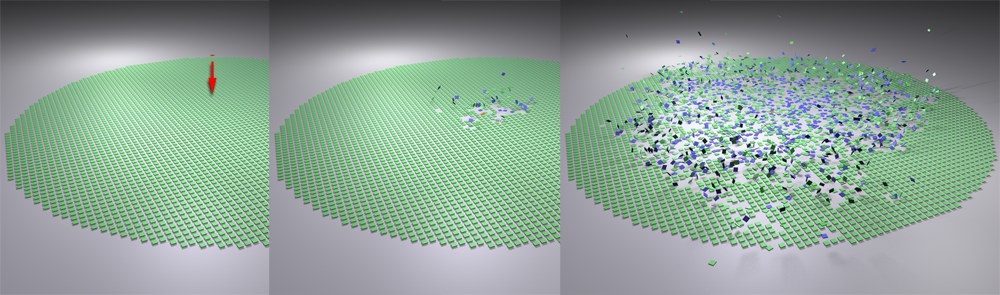 L’effet recouvrement utilisant Vélocité linéaire initiale.
L’effet recouvrement utilisant Vélocité linéaire initiale.
Veuillez noter que toutes les vélocités définies dans cette fonction sont mesurées en seconde (par exemple, si Vélocité linéaire initiale est réglée sur 200 cm, l’objet se déplacera de 200 cm par seconde). Cela s’applique également au paramètre Seul de vélocité linéaire, décrit plus bas.
Vélocité linéaire initiale[XYZ m]
Cette valeur définit la vélocité absolue X, Y et Z lorsque Dynamiques prend effet. Remarquez que vous devrez peut-être augmenter les Etapes par image lorsque vous travaillez avec des vélocités plus grandes pour éviter des calculs incorrects pour les collisions.
Vélocité angulaire initiale[HBP °]
Utilisez cette valeur pour définir la vélocité en rotation pour les axes H, P et B lorsque Dynamiques prend effet.
Utilisez cela pour définir si les vélocités nommées ci-dessus doivent utiliser le système de coordonnées de l'objet (option activée) ou le système le système de coordonnées global (option désactivée).
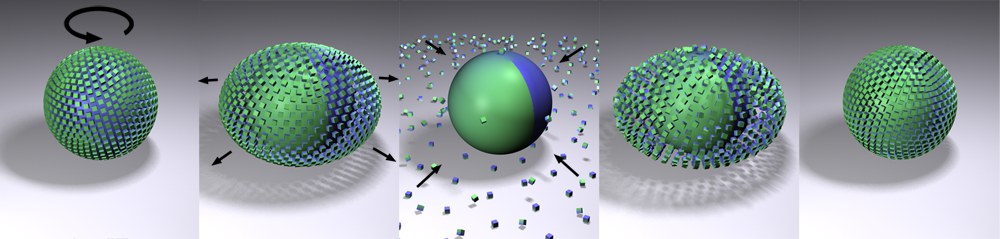 La sphère et les clones tournent; la sphère repousse les clones; l’option Dynamique est ensuite désactivée et les clones reviennent à leur position initiale.
La sphère et les clones tournent; la sphère repousse les clones; l’option Dynamique est ensuite désactivée et les clones reviennent à leur position initiale.
Vous pouvez désactiver l'option Dynamique à tout moment. Cela fera que Dynamiques n'affectera plus les objets dynamiques, c'est-à-dire que les objets reviendront à leur position d'origine; les objets animés retourneront à leur position initiale. Vous pouvez créer des effets spéculaires simplement en changeant entre les effets de la physique et la Ligne temporelle.
La transition dynamique définit si les objets dynamiques reviendront à leur position initiale via une force, incluant une détection de collision (option activée) ou via une simple interpolation (option désactivée) sans détection de collision.
Temps de transition définit le nombre d’images présentes entre la désactivation du Dynamique et le retour à l’état/position initial.
Seuil de vélocité linéaire[0..+∞m]
Seuil de vélocité angulaire[0..+∞°]
Ces valeurs de vélocité sont conçues pour optimiser la vitesse de calcul. Dès que la vélocité d'un objet dynamique se trouve 2 secondes au-dessous de ces seuils de valeurs, elle sera supprimée des calculs Dynamiques et s'arrêtera complètement. Ce état durera jusqu'à ce qu'il soit frappé (heurté) par un autre objet. L'objet sera de nouveau inclus dans le calcul Dynamiques jusqu'à ce que sa vélocité retombe au-dessous du seuil de valeurs de 2 secondes.
Le seuil de valeurs peut être défini séparément pour une vélocité Linéaire et Angulaire.
Si vous voulez une valeur d'Atténuation pour définir le moment où les clones doivent commencer à tomber, il peut arriver qu'ils soient exclus du calcul Dynamiques avant que Dynamiques prenne effet. Dans ce cas, réglez le seuil de valeur sur 0.
Assurez-vous aussi de ne pas laisser l'Effecteur/Modificateur passer trop rapidement par les clones (en particulier lorsque l'effet de l'Effecteur/du Modificateur est restreint au niveau spatial) car cela peut donner un phénomène paradoxal dû aux larges distances que le champs de force doit parcourir entre les cadres. Cela peut être compensé par l'augmentation de la portée du champs de force.