Collision
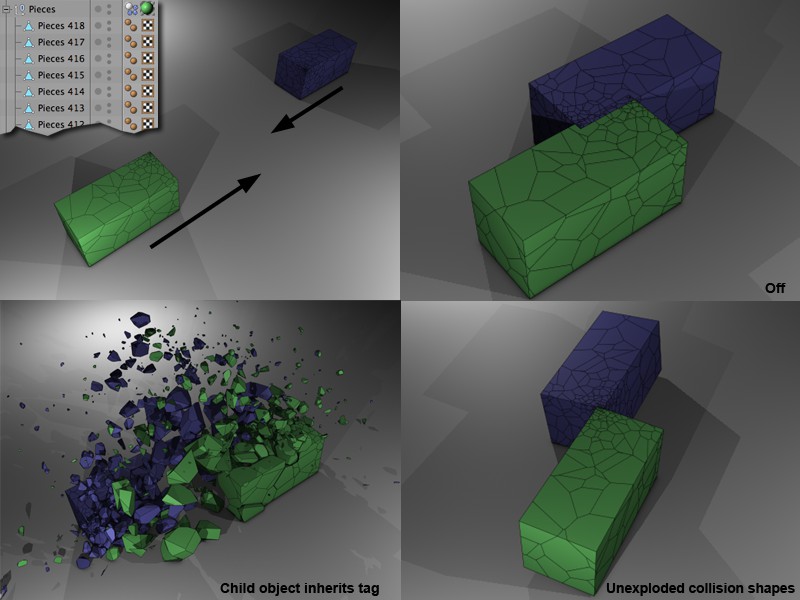 La hiérarchie affichée en haut à gauche (la propriété est appliquée à l'objet Neutre parent) entre en collision avec une du même type. Les autres images représentent différents paramètres de la Hiérarchie.
La hiérarchie affichée en haut à gauche (la propriété est appliquée à l'objet Neutre parent) entre en collision avec une du même type. Les autres images représentent différents paramètres de la Hiérarchie.
Cette option s'applique lorsque l'objet auquel est assignée la propriété possède sa propre hiérarchie (et n'est pas un objet générateur de clones, pour lequel s'applique le menu de sélection suivant) et définit si la hiérarchie (si elle existe) en-dessous de l'objet avec la propriété doit aussi être incluse comme un objet collision.
Toutes les hiérarchies appartenant à la propriété seront ignorées par rapport à Dynamique. Seul l'objet avec la propriété entrera en collision. Mais le mouvement Dynamique "glissera" les sous-objets avec lui.
Appliquer propriété aux sous-objets
Cette propriété est affectée à tous les objets enfants. Ensuite, ils se comporteront tous indépendamment, comme si il ne faisaient pas partie de la hiérarchie.
La hiérarchie complète de l'objet auquel est attribuée la hiérarchie sera perçue comme un seul objet fixé.
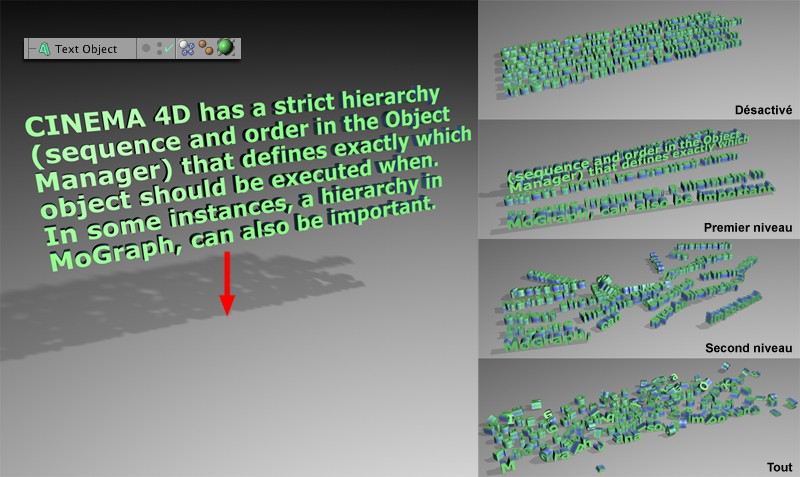 L'objet Texte à gauche tombe sur le sol. Selon le paramètre des Eléments individuels, le texte entrera en collision comme un ensemble, comme des lignes, des mots ou des lettres.
L'objet Texte à gauche tombe sur le sol. Selon le paramètre des Eléments individuels, le texte entrera en collision comme un ensemble, comme des lignes, des mots ou des lettres.
Ces modes de paramètre sont conçus pour les générateurs qui génèrent eux-mêmes des objets, tels que l'Texte. Cela dépend de la façon dont les objets doivent entrer en collision: indépendamment ou tous ensemble.
Pour l'Texte de MoGraph, par exemple, voici ce qu'il se passe par rapport à une collision de texte:
Tout l'objet Texte sera un objet collision.
Chaque ligne de texte sera un objet de collision individuel.
Chaque mot sera un objet de collision individuel.
Chaque lettre sera un objet de collision individuel.
Cette option sert à ajuster ce qui suit:
- Pour les déformations de corps souples, une question sera posée pour l'objet d'intersection. Désactiver cette option aidera à optimiser la vitesse de rendu. Vous ne devez faire cela que si l'objet n'a pas tendance à produire d'auto collisions à cause de sa forme ou de ses paramètres (comme c'est par exemple le cas avec les pneus, les ballons, etc.).
- Si la propriété est assignée un objet générateur de clones (Objet cloneur, objet Texte, etc.), cette option définit la détection de la collision entre les objets individuels.
Il est possible de déformer des objets en collision en utilisant des Déformateurs qui, bien entendu, affecteront la forme de la collision. Occasionnellement (par exemple avec l’objet Fracture Voronoï, qui peut être déformé en utilisant les paramètres de l’onglet Détails), il peut s’agir d’une déformation mineure et des objets non déformés supplémentaires devront être ajoutés pour accélérer le processus de collision. Dans un tel cas, il est préférable de désactiver cette option.
En général, la détection de la collision est un processus qui prend du temps mais qui se traduit par un comportement d'objet réaliste: les objets peuvent être repoussés, s'arrêter à cause d'une friction, etc. Plus une forme est complexe, plus la détection de la collision prendra de temps. C'est pourquoi ce menu offre des formes de substitution qui peuvent être positionnées autour de l'objet de collision. Cela permet de gagner beaucoup de temps pour le rendu. De loin, il est parfois très difficile de voir si l'objet actuel ou l'objet de substitution est utilisé pour la détection de la collision pendant l'animation. Vous pouvez trouver les formes disponibles dans le menu options Formes de collision de l'onglet Collison.
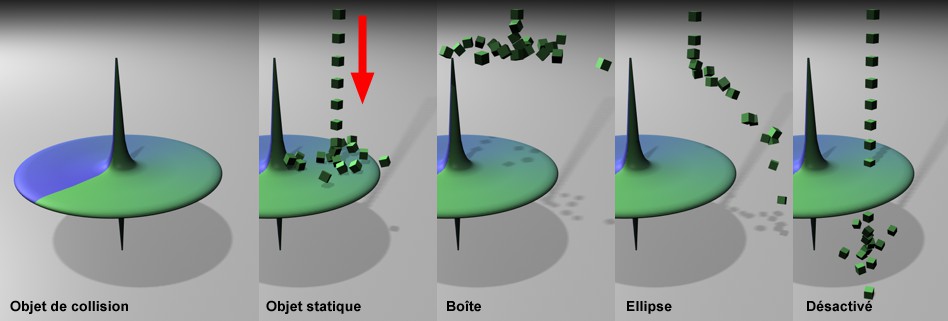 A gauche, les clones entre en collision avec un objet collision. Les clones sont repoussés différemment, en fonction de l'option définie dans le menu Forme.
A gauche, les clones entre en collision avec un objet collision. Les clones sont repoussés différemment, en fonction de l'option définie dans le menu Forme.
Les formes de substitution disponibles dans l'ordre de vitesse de rendu - du plus rapide au plus lent - sont : Boîte; Ellipsoïde, Convexe, maillage statique; maillage mobile.
Voici ce qui s'applique pour les modes ci-dessous: Automatique] est toujours bon à utiliser, il est possible d'optimiser le temps de rendu avec les modes restants. <CYCLE_ID RIGID_BODY_SHAPE_DEFAULT> Automatique </CYCLE_ID> Les modes mentionnés ci-dessous (et quelques autres, par exemple, l'objet sol possède sa propre analogie) seront affectés intérieurement - automatiquement, en fonction de l'objet utilisé. Par exemple, on affectera automatiquement un mode aux primitives : on affectera à un cube le mode [[Boîte, à un objet polygonal le mode Maillage statique ou Corps convexe, etc. Le mode le plus optimal pour l'objet correspondant sera automatiquement sélectionné. Passez à un mode différent peut aussi vous aider à gagner du temps pour le rendu. Par exemple, si vous travaillez avec plusieurs petits objets de forme sphérique, un mode Corps convexe leur sera automatiquement assigné mais vous pouvez tout aussi bien leur attribuer un mode Ellipsoïde, qui fera un rendu beaucoup plus rapidement mais qui diffère visuellement.
C'est principalement un réglage de compatibilité pour charger des scènes anciennes (il appliquera un Maillage statique au lieu d'un Corps convexe aux objets correspondants.
Est équivalent à la boîte de contour de l'objet, qui englobe l'objet dans ses dimensions extérieures maximales.
Une ellipsoïde (ovale "volumétrique") qui passe dans la boîte de contour sera encastrée dans l'objet de collision. Pour un cube, par exemple, il s'agirait d'une sphère qui toucherait les six côtés du cube.
Ces trois paramètres ont d'abord été conçus pour être utilisés avec les formes de collision de pneu. Un objet de collision cylindre (optimisé intérieurement) sera encastré dans la boîte de contour de l'objet propriété. Il vous suffit ensuite de sélectionner l'axe correspondant. Enfin, définissez l'axe de rotation si votre modèle de pneu comme l'axe de rotation du cylindre.
Un type de peau rugueuse sera placé autour de l'objet. Il n'y aura pas de découpure, de cavité ou de trou dans les collisions.
A part Maillage Statique, c'est le seul mode qui utilise la géométrie réelle de l'objet et non pas une version simplifiée. L'objet donné sera constamment vérifié pour les collisions dans son intégralité, même lorsqu'il se déplace.
Notez que ce mode calculera plus doucement et comporte aussi des problèmes (par exemple, intersection, les objet peuvent se "rassembler", etc.). Si vous êtes confronté à un problème, nous vous suggérons de sélectionner l'option Autre Objet conjointement avec un simple objet de substitution.
C'est le mode qui prend le plus de temps, après le Maillage Statique, pour les rendus parce que la géométrie réelle de l'objet est utilisée (et non une version simplifiée).
Tous les objets fortement affectés par les dynamiques (

) seront toutefois vus comme des objets de collisions statiques (immobiles). Le nom Maillage statique peut être compris littéralement. Ce mode doit aussi être utilisé quand par exemple une sphère doit être calculée comme creuse et que des objets dynamique rebondissent à l'intérieur.
Le corps n'entrera pas du tout en collision. Tous les objets dynamique traverseront le corps.
Vous permet d'assigner un objet collision de substitution. Imaginons que vous travaillez avec un objet haute-résolution composé de millions de polygones et que seule une région spécifique de l'objet doit être utilisée pour la collision. Ce serait difficile à calculer. Toutefois, si vous utilisez un objet de substitution qui ne correspond que grossièrement à la forme de l'objet d'origine et qui est composé de seulement quelques centaines de polygones, le calcul peut être accéléré considérablement. Si cette option est sélectionnée, il est possible de rendre un champ lien disponible. Vous pouvez placer l'objet de substitution dans ce champ. Notez que la position de l'objet de substitution n'est pas importante - lorsqu'il est sélectionné en tant que tel, l'objet sera automatiquement positionné à l'origine de l'objet de départ.
La fome de collision (interne) de l'objjet de substitution adhère en retour aux règles décrites ci-dessus (si l'objet n'a pas de propriété de corps dynamique, sa Forme doit être réglée sur Automatique). Vous pouvez aussi affecté un corps dynamique à l'objet de substitution afin de définir plus précisément la forme. Vous pouvez aussi désactiver l'Activée option.
Glissez l'objet collision de substitution dans ce champ (voir paramètre précédent).
Utilisez cette valeur pour augmenter (valeurs positives) ou diminuer (valeurs négatives) la taille du champ de collision de l'objet (contrairement au paramètre suivant, Marge, la forme de l'objet sera préservée). Ce paramètre sert à créer des effets spécifiques. Par exemple, un mur de briques comportant des trous mais qui ressemble toujours à un vrai mur. Ce paramètre peut aussi être appliqué, par exemple, pour créer une pénétration visible d'un objet si vous souhaitez éviter d'avoir à augmenter la valeur Etapes par image .
Normalement, vous n'avez pas à modifier ces paramètres. Le paramètre Marge reflète le paramètre largeur de scène pour Marge de collision, que vous ne pouvez définir ici qu'au niveau de l'objet.
La valeur peut aussi être diminuée à 0, ce qui raccourcira le temps de rendu mais réduira aussi la stabilité. Des valeurs de Marge très basses peuvent aussi mener à la pénétration d'un objet.
Des valeurs supérieurs sont généralement recommandées si des rendus erronés et/ou des collisions incorrectes ont lieu. Cela peut toutefois aider à augmenter la valeur Etapes par image.
En général, les arêtes des primitives sont arrondies.
Contrairement au paramètre Augmenter la taille, le paramètre Marge ne sert qu'à augmenter la stabilité des dynamiques.
Préserver la forme du corps souple
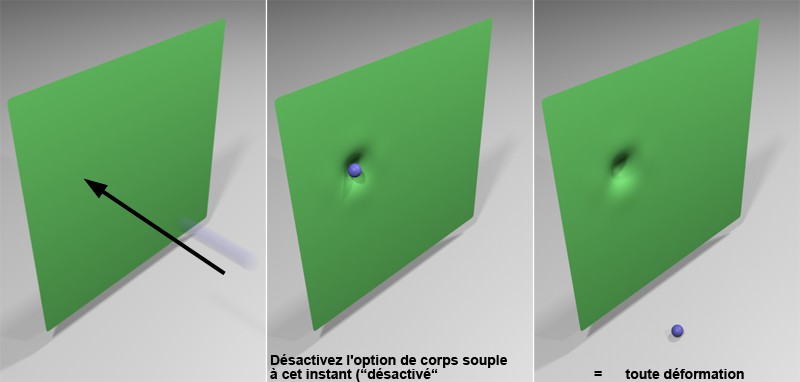 Si elle est activée, un corps souple peut se transformer en un corps rigide déformé. Les corps souples ont tendance à lisser les bosse.
Si elle est activée, un corps souple peut se transformer en un corps rigide déformé. Les corps souples ont tendance à lisser les bosse.
Cette option, par exemple, adaptée pour maintenir les bosses sur les surfaces rigides (en fait, l'opposé de ce que fait un corps souple). Cette option ne fait rien de plus que geler la forme déformée d'un corps souple lorsque vous passez le Corps souple de Constitué de Polygones/Lignes à Désactivé. Il ne reste plus qu'un corps rigide déformé.
Lorsque deux objets entrent en collision, cette valeur témoigne de la force avec laquelle les objets rebondissent l'un sur l'autre. Les valeurs autour de 0 se traduisent par un rebond non-élastique - comme deux sphères de plasticine entrant en collision. Les valeurs autour de 100% se traduisent par un rebond beaucoup plus prononcé, par exemple, deux boules de billards qui entrent en collision.
Les valeurs physiquement correctes sont comprises entre 0% to 100%.
Notez qu'il y a toujours deux valeurs - une pour chacun des objets de la collision. Par exemple, un sol comprend toujours une certaine élasticité, c'est-à-dire que si un objet de la collision a une valeur Rebond de 0, le second ne rebondira pas, même si on lui attribue une valeur de 100%.
Si plusieurs objets entrent en collision les uns avec les autres et que vous définissez des valeurs plus faibles, les objets s'arrêteront plus tôt.
La physique offre trois types de friction:
- La friction statique
- La friction cinétique
- La friction roulement
Les frictions statique et cinétique sont combinées dans un seul et même paramètre dans CINEMA 4D, Friction. Le paramètre friction est une mesure de la force de freinage qu'un objet rencontre lorsqu'il glisse sur une surface/un objet ou de la force qui amène un objet immobile à glisser sur une surface/un objet. Les deux types de friction sont égaux en mesure. Notez que deux objets sont toujours impliqués dans une équation de friction, chacun pouvant comporter une valeur de friction différente. Si un objet possède une valeur de 0%, la friction de l'autre objet ne peut pas être augmentée, peu importe l'intensité de sa valeur.
En général, plus la valeur est élevée (elle peut être bien supérieure à 100%), moins l'objet glissera ou plus il roulera ou tombera. Si vous avez plusieurs objets qui entrent en collision les uns avec les autres et que vous définissez des valeurs plus faibles, les objets s'arrêteront plus tôt.
Intentionnellement, CINEMA 4D n'inclut pas de friction roulement. Vous pouvez toutefois la simuler à l'aide de Amortissement angulaire.
Comportement de la collision. Imaginez que plusieurs objets sont tombés sur le sol et que le comportement de collision est le même. Cela ne semblerait absolument pas réaliste.
Plus la valeur Bruit de collision est élevée, plus le comportement des objets individuels variera.