Collision
La Friction est une mesure de la force de freinage subie par un objet lorsqu'il glisse sur un autre, ou de la force nécessaire pour qu'un objet au repos commence à glisser. En physique, on distingue la friction statique et la friction dynamique. Cinema 4D ne fait pas cette différence, mais les combine dans le seul paramètre Friction.
La friction ne se produit qu'au moment de la collision.
Notez que la friction implique toujours 2 objets comme partenaires de collision, chacun d'entre eux pouvant avoir défini ses propres valeurs de friction. Si l'un des objets a une valeur de frottement de 0, le frottement entre les deux ne peut pas être augmenté même si l'autre objet a une valeur élevée.
En règle générale, plus la valeur est élevée (elle peut être bien supérieure à 100 %), moins un objet est susceptible de glisser sur un autre et plus il est susceptible de rouler ou de tomber si les vitesses sont suffisamment élevées.
Si vous avez besoin de la friction de roulement qui existe également en physique : il est simulé dans une certaine mesure par le paramètre Atténuation dans les paramètres de simulation (cependant, l’atténuation ralentit également les mouvements linéaires en conséquence).
En cas de collision, ce paramètre définit la force avec laquelle le corps rigide rebondit. Cette valeur ne doit être augmentée qu'avec prudence, sinon la simulation aura tendance à exploser si des valeurs trop élevées sont définies ici (l'énergie est introduite dans le système de simulation de manière analogue à une machine à mouvement perpétuel, qui a tendance à être instable).
Les valeurs faibles font entrer les corps rigides en collision comme un sac de sable, tandis que les valeurs croissantes les font rebondir de plus en plus loin les uns des autres jusqu'à ce qu'ils explosent à des valeurs très élevées.
Afin d'arrêter une simulation le plus rapidement possible, il convient de n'utiliser ici que des valeurs très faibles.
Les caractéristiques de l'adhérence sont similaires à celles du sable mouillé. Lorsque plusieurs petits corps rigides se rassemblent, ils forment des amas.
Par exemple, lorsqu'un cylindre collant roule sur une telle pile de corps rigides, l'effet illustré se produit.
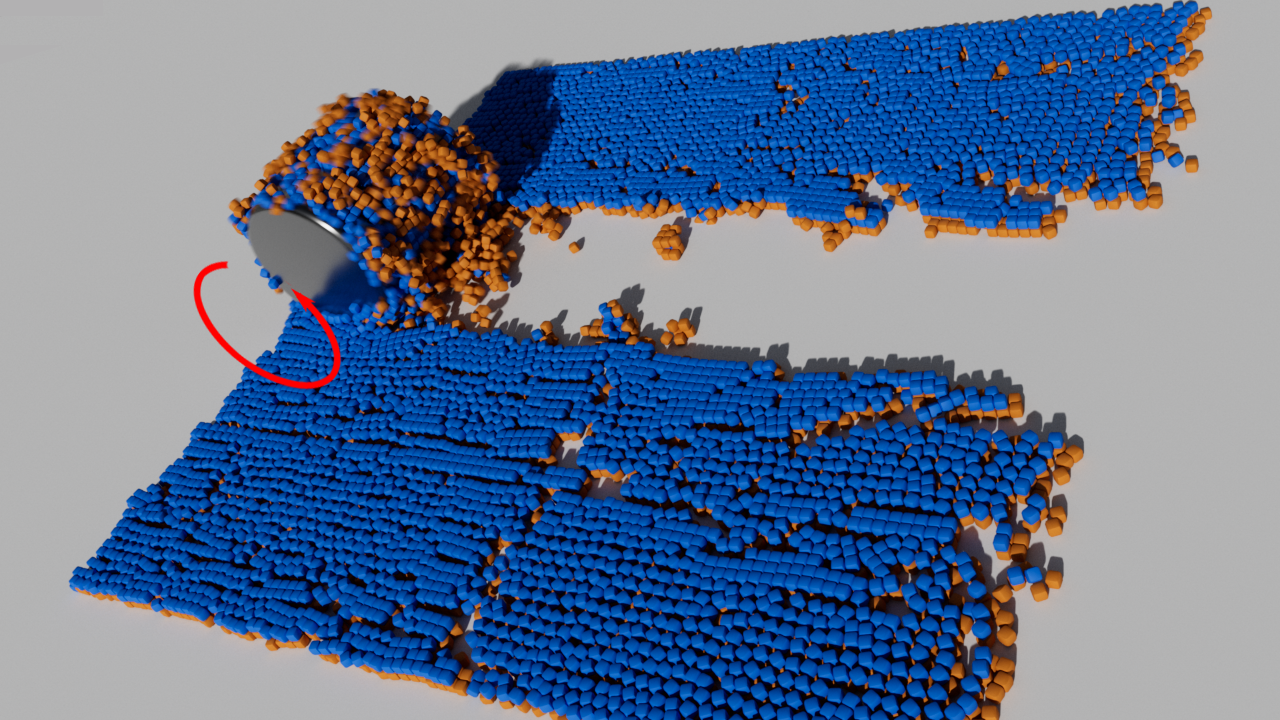
L'adhérence n'est pas aussi bien adaptée aux objets de grande taille que l'on souhaite coller ensemble, même si, dans une certaine mesure, cela fonctionne également : cependant, ils ont alors tendance à ne coller ensemble que dans les coins.
Les paramètres nommés Épaisseur sont toujours utilisés dans les simulations pour éviter autant que possible les pénétrations. Il s'agit d'une sorte de distance de sécurité autour de l'objet de simulation, à partir de laquelle le cas de collision se produit et l'algorithme tente d'éloigner les éléments qui entrent en collision.
Par conséquent, s'il y a des pénétrations visibles, vous devez augmenter la valeur avec précaution.
Pour les cubes, ce cas particulier s'applique : si la forme de collision est définie sur Boîte, ils peuvent être empilés et entrer en collision sans espace.
Par nature, il n'existe pas de collisions absolument parfaites. Vous devez toujours être conscient du fait qu'il y aura de petites pénétrations et des lacunes. Mais cela peut être optimisé. Par exemple, avec Formes de collisionCoques convexes, des collisions relativement précises se produisent à des vitesses de calcul raisonnables.
Si vous souhaitez régler les paramètres ci-dessus individuellement pour chaque corps rigide, vous pouvez utiliser la petite flèche située à côté de la plupart des paramètres décrits ici pour rendre visible un champ de lien d'influence. Les propriétés d'influence MoGraph sont stockées ici - elles peuvent être créées de manière interactive avec ![]() Sélection MoGraph ou
Sélection MoGraph ou ![]() Pinceau d'Influence MoGraph en peignant sur les connecteurs. Il est également possible de les définir à l'aide de champs.
Pinceau d'Influence MoGraph en peignant sur les connecteurs. Il est également possible de les définir à l'aide de champs.
Ces influences sont toujours affectées à une valeur de paramètre. Cette valeur de paramètre définit une valeur maximale qui est fixée spécifiquement pour le corps rigide individuel par influence. Par exemple, si la valeur du paramètre est fixée à 200 et qu'une influence de 0,5 ou 50 % est définie, la valeur 100 est appliquée à ce corps rigide.
Exemple
Dans la scène suivante, les pneus sont placés à l'aide d'un objet cloneuur et reliés au "châssis" à l'aide d'un objet Connecteur ( type de suspension de roue) . Si vous regardez bien, la paire de pneus de l'essieu central - le sixième - est bloquée. À cette fin, un champ de cube a été créé pour fixer la friction des deux corps rigides à 0.
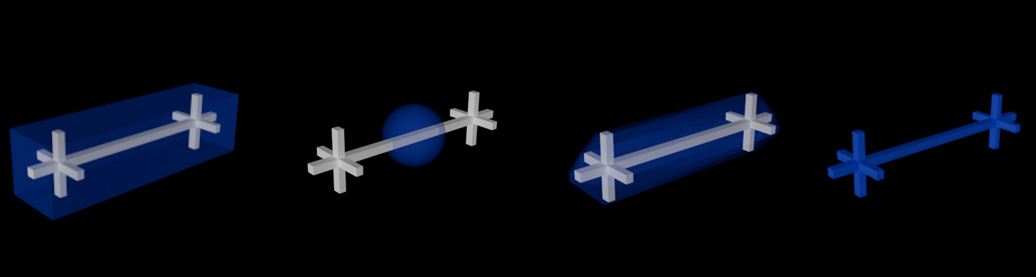 De gauche à droite : Formes de collision en bleu : boîte, sphère, coques convexes (précision géométrique = 0, mais peut être grandement améliorée avec des valeurs plus élevées), maillage de triangles.
De gauche à droite : Formes de collision en bleu : boîte, sphère, coques convexes (précision géométrique = 0, mais peut être grandement améliorée avec des valeurs plus élevées), maillage de triangles.
Les calculs de détection des collisions sont généralement très gourmands en ressources informatiques. Cependant, ils sont les seuls à entraîner des mouvements d'objets convaincants : les corps peuvent entrer en collision avec d'autres, s'immobiliser en raison du frottement, etc.
Plus la forme du corps est complexe, plus le calcul des collisions est complexe. C'est pourquoi ce menu déroulant propose des formes de substitution rapides à calculer qui peuvent être placées au-dessus de l'objet réel. Dans la simulation, il n'est souvent pas possible de savoir à distance si la forme réelle de l'objet a été utilisée pour le calcul de la collision ou, par exemple, seulement une boîte qui a été automatiquement ajustée à la taille de l'objet.
L'ordre en termes de vitesse de calcul et de précision des collisions est à peu près le suivant (du plus rapide/imprécis au plus lent/précis) : cubique, sphère, coques convexes, maillage de triangles. En détail :
Auto
Si Cinema 4D détecte que les primitives Cube et Sphère ont été utilisées, elles seront automatiquement calculées en interne avec les options Cubique et Sphère. Sinon, les coques convexes seront utilisées (la précision géométrique par défaut de 5 sera suffisante dans la plupart des cas et permettra de vérifier les collisions très rapidement).
Attention, la fonction Auto n'est disponible que pour les corps rigides, pas pour les objets de collision.
Maillage de triangles
L'objet auquel la propriété est attribuée est défini avec sa forme complète comme forme de collision, ce qui fait de cette option la plus lente, mais la meilleure en ce qui concerne les collisions, car la forme exacte de l'objet est utilisée pour le calcul des collisions.
Cependant, les coques convexes avec une précision géométrique plus élevée permettent souvent de calculer des collisions tout aussi bonnes, mais beaucoup plus rapidement.
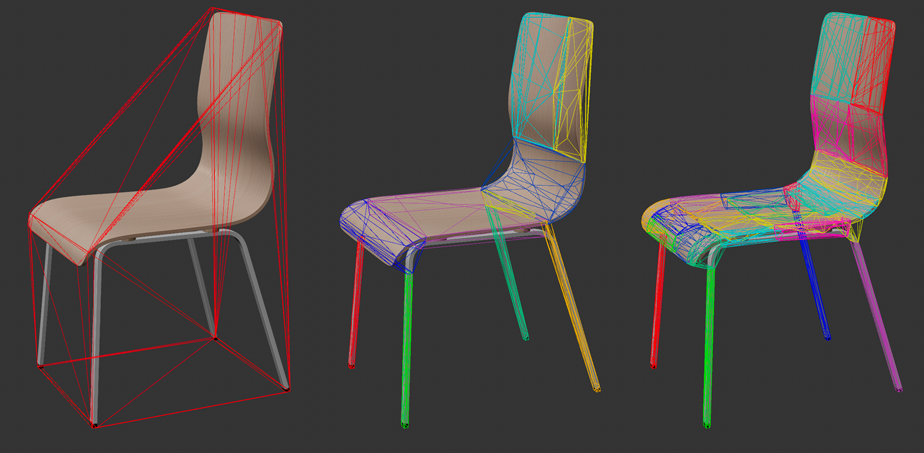
Dans ce cas, une ou plusieurs coques enveloppantes sont placées autour de l'objet ou de ses parties, qui se comportent de la même manière qu'une peau en caoutchouc. Le paramètre Précision de la géométrie, qui définit le nombre de "peaux de caoutchouc", s'affiche.
Par ailleurs, cette création de forme équivalente fonctionne exactement de la même manière que celle déjà décrite pour l'outil de placement à l'adresse Précision.
Si vous souhaitez afficher la forme de la collision, activez l'option Formes de corps rigides dans l'onglet Simulation du menu Préférences. Pour ce faire, vous devez démarrer la simulation ou avancer d'une image à partir de l'image de départ.
Sphère
Une sphère adaptée à la boîte de délimitation de l'objet est utilisée comme forme de collision.
Cubique
La plus petite boîte comprenant tous les points de l'objet sera utilisée comme forme de collision.
Vous pouvez définir ici le côté du polygone à partir duquel les collisions doivent être vérifiées. Vous pouvez choisir entre :
- Avant: les collisions ne se produisent que lorsque les éléments de collision s'approchent de l'extérieur (par rapport aux normales).
- Arrière: les collisions ne se produisent que lorsque les éléments de collision s'approchent par l'arrière (par rapport aux normales).
- Les deux: les collisions auront lieu des deux côtés.
Ce paramètre devient plus pertinent lorsque des pénétrations dans des collisions se produisent. Les pénétrations ne sont presque jamais souhaitées. Une fois que les objets se croisent, il est difficile de les séparer à nouveau lors du réglage. Si, en revanche, vous avez sélectionné Avant, il sera facile de séparer les objets. En fait, aux endroits où cela a un sens, une petite impulsion sera créée en interne, ce qui contribuera à maintenir les objets à distance.
Précision de la géométrie[0.00..+∞]
Ce paramètre s'affiche si l'enveloppe Auto (corps rigides uniquement) ou Convexe est sélectionnée sous Formes de collision (voir aussi Coques convexes).
Lorsque les valeurs augmentent, la forme de la collision se rapproche de la forme réelle de l'objet sans l'atteindre exactement : le calcul est toutefois beaucoup plus rapide qu'avec Maillage de triangles.
Si la valeur est fixée à 0, les creux, renfoncements ou trous ne seront pas pris en compte dans le calcul des collisions, mais une seule "peau de caoutchouc" sera placée autour de l'objet, comme le montre l'illustration de gauche :
Niveau de fusion de la hiérarchie[0..2147483647]
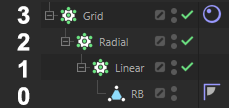
Les générateurs de clones tels que les objets Cloneur ou Répartition peuvent être dupliqués par imbrication (ce paramètre ne fonctionne que si la propriété se trouve sur un tel objet). Par exemple, si un objet Cloneur clone d'abord linéairement un cube, puis qu'un second cloneur duplique radialement l'ensemble du conglomérat de clones, puis le clone dans une grille, utilisez cette valeur pour définir les niveaux hiérarchiques, chacun d'entre eux devant fonctionner comme son propre corps rigide. Il sera compté à partir du bas : 0 fera de chaque clone un corps rigide, 1 seulement la première hiérarchie de clones (dans l'exemple du cloneur linéaire), etc. Dans l'exemple présenté, 3 considérerait alors l'ensemble du conglomérat de clones comme un seul corps rigide.
Les hiérarchies normales qui se trouvent en dessous de l'objet porteur de la propriété (c'est-à-dire sans autre clone comme dans l'exemple ci-dessus) fonctionnent de la même manière. Veuillez noter qu'autrement, seuls les objets modifiables fonctionnent actuellement comme décrit (par exemple, pas d'objets de base, rendez-les modifiables en appuyant sur la touche C).
Dans Cinema 4D, il existe de nombreuses façons de modifier les objets à l'aide du déformateur. Activez cette option si cette déformation doit être utilisée comme forme de collision. Les déformations animées ne sont actuellement pas prises en charge - la forme au début de la simulation sera utilisée.