オブジェクトの属性
タイプ
下記の2タイプのモーターが用意されています。
リニア
モーターのZ軸に平行な、直線的な力が生成されます。
回転
モーターのZ軸を中心に働くトルクが生成されます。
リニアと回転
上記の両タイプが同時に生成されます。
オブジェクトAおよびオブジェクトBの各フィールドは、下記の各ダイナミクスオブジェクトの場合に表示されます。
- コネクタ
- モーター
- スプリング
これらの各オブジェクトは、さまざまな方法により、他の2つのオブジェクトと互いに接続しています。
いずれのオブジェクトも、オブジェクトAおよびオブジェクトBの各フィールドにドラッグできます。オブジェクトAおよびオブジェクトBの各フィールドのうち、いずれか一方を空のままにすると、下記の結果になります。
- コネクタ:位置と回転角度が固定されます。(でないと、関連オブジェクトと共に移動/回転してしまいます。)
- モーター:基本原理「作用・反作用」が適用されなくなります。また、力とトルクが必然的に発生します (下記参照)。
- スプリング:いずれか1つのスプリングが、ワールド座標系の原点に配置されます。
オブジェクトAおよびオブジェクトBの各フィールドに接続対象オブジェクトをドラッグする順序がどうであれ、ラグドールまたはホイールサスペンションのうちいずれかのタイプを選択しない限り、機能しません。
モーターダイナミクスを用いる場合に、オブジェクトAおよびオブジェクトBのうちいずれか一方のフィールドが空のままである場合:物理法則 (作用・反作用) によれば、ある物体が別の物体に力を及ぼすと、後者は前者に対しそれと同じ大きさの力を、同一直前上で逆方向に及ぼします。しかしこの法則は、オブジェクトAおよびオブジェクトBの両方のフィールドにオブジェクトが入力されていないと成立しません。たとえばヘリコプターは、回転翼がモーター駆動で回転します。同時にその機体には、同一直線上で働く力が及びます。これは尾部回転翼によって相殺されます。でないと、機体はその垂直軸を中心に回転してしまいます。
 さまざまな抑制ラインでコネクタを用いることにより、上昇する飛行船が適切な位置に保たれています。
さまざまな抑制ラインでコネクタを用いることにより、上昇する飛行船が適切な位置に保たれています。
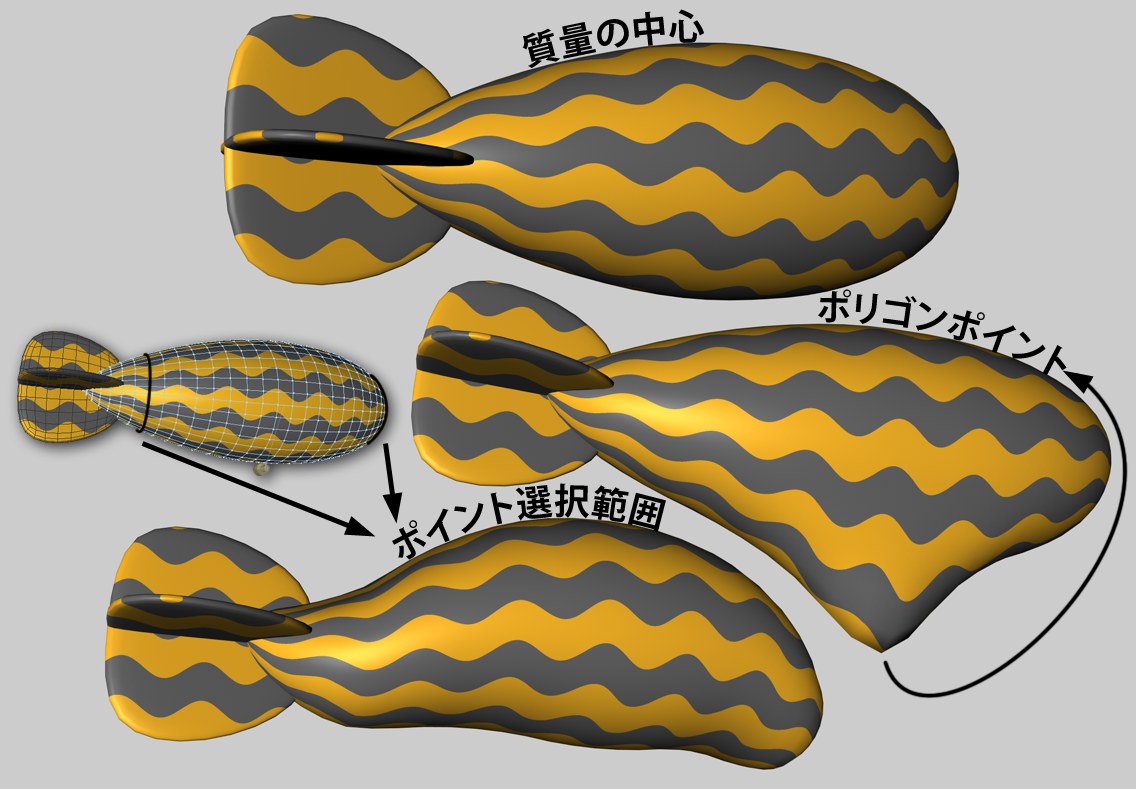
オブジェクトが力に導かれるとき必ず重要となるのは、当該オブジェクト上のどのポイントでその現象が生じるかです。たとえば、ハードボディオブジェクトの重心にモーターがあるとします。このオブジェクトは、このモーターによって押されると、(他に働く力がない限り)まっすぐに移動します。また、このオブジェクトの重心の外側に力が及んだ場合は、必然的にトルクが発生し、このオブジェクトは回転します。
一方、ソフトボディオブジェクトの動作は上記と異なります。各オブジェクトポイントは、スプリングを介して互いにつながっています。1つのポイントにのみ力が及んだ場合、その影響は比較的大きな領域に広がりますが、思いどおりの結果を得られないことがあります。
結合Aおよび結合Bの各パラメータは、下記の各ダイナミクスオブジェクトに使用できます。
- コネクタ
- モーター
- スプリング
このオプションには、付加的な設定内容は含まれていません。力は、所定のオブジェクトの重心で生成されます。ソフトボディオブジェクトが変形することはありません。
このオプションでは、力の起点となる特定のオブジェクトポイントを選択できます。影響範囲の設定値を調整することにより、このポイントの周辺領域(オブジェクトに力が及ぶ範囲)を拡大/縮小できます。なお、これはソフトボディオブジェクトにのみ関連するものであり、コネクタを併用してリジッドボディに適用した場合は無効となります。
力は、マップによって適用することもできます(ポイント選択範囲タグまたは頂点マップ)。この他にも、選択した(またはウェイト設定を施した)ポイントに影響を及ぼす度合を調整するためのパラメータなどが用意されています。
リニア 的な力を持つダイナミクスモーター、またはダイナミクススプリングには、オフセット値を設定できます。これにより、力の定着するポイントを(オブジェクトの原点から)設定できます。オフセット値を設定すると、必然的にトルクが発生します。
インデックス[-2147483648..2147483647]
インデックス[-2147483648..2147483647]
これはオブジェクトのインデックス番号です。内部的には、ポリゴンオブジェクトの全てのポイント(生成されたポイントを含む)に割り振られる番号です。値をブラウズすると、ビューポート内にこの番号がインタラクティブに表示されます。
全てのオブジェクトポイント(ただし、ポリゴンオブジェクトの場合のみ)は、構造マネージャに一覧表示されます。
このフィールドには、ポイント選択範囲タグまたは頂点マップをドラッグできます。
ソフトボディの場合、単一のオブジェクトポイントに対する力の影響を処理するのは難しく、リアル感が失われがちです。そこで、影響範囲パラメータを用いると、ポイントの周辺領域(力の影響が及ぶ範囲)を定義できます。この値を100% に設定すると、メッシュ全体が含まれます。これにより、ポリゴンポイント(またはポリゴン選択範囲)自体に100%のウェイト設定が施され、そこから最も離れたポイントに0%のウェイト設定が施されます。設定値が低いほど、力の影響を受けるポイントの数も少なくなります。1%前後の値に設定した場合は、当該選択ポイントまたは選択範囲にしか影響しません。(ただし実際には、内部に組み込まれている保護的な仕組みにより、より大きな値が有効になります。)
低めの設定値が有効なのは、ポイント選択によって定義した比較的大きな領域を、ダイナミクスコネクタ/スプリング/モーターに接続する場合です(コネクタを介して円に接続する、ソフトボディの管など)。
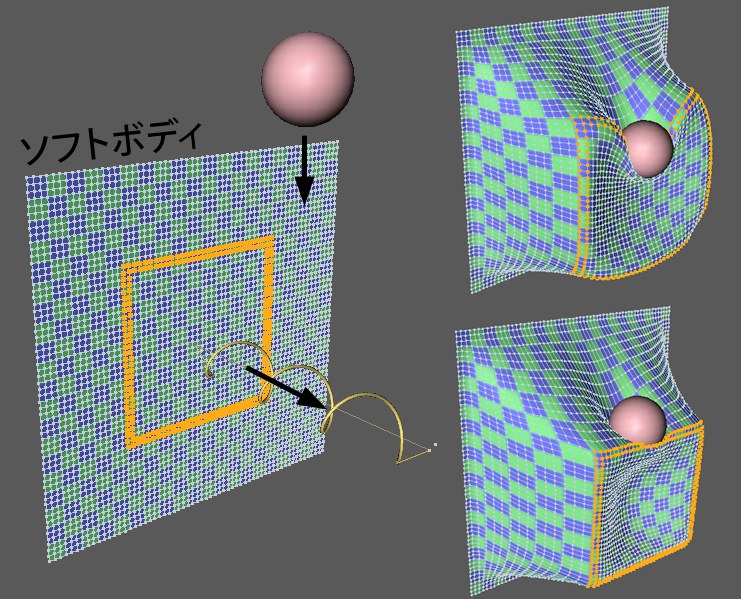 ソフトボディ上で強調表示されたポイント選択範囲をスプリングによって引き出し、その上に球体を落とします。この場合、形状を保持の設定値が低いと右上の図のようになり、設定値が高いと右下の図のようになります。
ソフトボディ上で強調表示されたポイント選択範囲をスプリングによって引き出し、その上に球体を落とします。この場合、形状を保持の設定値が低いと右上の図のようになり、設定値が高いと右下の図のようになります。
この値は、頂点マップの影響を受ける選択範囲/ポイントのジオメトリを、力によって変形させる度合を設定するためのものです。設定値が低いほど変形の度合は大きくなり、設定値が高いほど変形の度合は小さくなります。
オブジェクトの形状を元に戻すときは、スプリングを用います。この減衰の度合は、この値を通じて調整できます。この設定値を小さくすると、効果の強度が増します。
オブジェクトAの説明で触れたとおり、「action = Reactio」は両方のオブジェクトに適用されます。これらのオブジェクトのいずれか1つに、力/トルクが非現実的に及ぶようにするには、この設定内容を適用します。
下記の各モードが用意されています。
リニアターゲットスピード / 回転ターゲットスピードの設定値に達すると、それに応じて力/トルクが弱まります。ここで設定した力/トルクより大きな力/トルクが生成されることは決してありません。
速度を加味せずに力/トルクが加えられます。このため、速度が著しく増す可能性があります。
モードがスピードを調節に設定されている場合、ここで最大速度を設定できます。ここで設定した速度に達すると、力が内部的に制限されます。接頭語は方向を定義するものです。
モーターのZ軸沿いに直線的な力が及ぼされます。オブジェクトの質量や摩擦の度合 (床上の立方体など) によっては、大きめの設定値が必要となることがあります。
モードがスピードを調節に設定されている場合、ここで最大角速度を設定できます。ここで設定した速度に達すると、トルクが制限されます。接頭語は回転方向を定義するものです。
モーターのZ軸を中心に働くトルクが及ぼされます。オブジェクトの質量が大きいほど、より大きな値を設定する必要があります。