오브젝트 속성
유형
리니어
이 유형을 사용하면 오브젝트 A와 오브젝트 B에서 정의한 오브젝트 사이에 선형의 직선 나선형 스프링이 표시됩니다. 이 경우 스프링의 위치는 중요하지 않습니다(오브젝트가 정의되지 않은 경우).
회전 스프링
여기에는 회전 스프링이 정의되어 있습니다. 즉, 토크를 생성하는 스프링(항상 오브젝트의 질량 중심에서 작용)입니다. 회전 스프링은 시계 운동에 사용되었습니다. 스프링의 위치는 관련된 두 오브젝트의 공통 피벗 지점(예: 힌지 커넥터가 배치된 위치)과 일치해야 합니다. 또한 시각적 스프링 평면을 회전 평면에 배치해야 합니다. 회전 스프링은 시계 운동에 사용되었습니다. 스프링의 위치는 관련된 두 오브젝트의 공통 피벗 지점(예: 힌지 커넥터가 배치된 위치)과 일치해야 합니다. 또한 시각적 스프링 평면을 회전 평면에 배치해야 합니다. 스프링의 위치는 관련된 두 오브젝트의 공통 피벗 지점(예: 힌지 커넥터가 배치된 위치)과 일치해야 합니다. 또한 시각적 스프링 평면을 회전 평면에 배치해야 합니다.
선형 + 각도 스프링
위에서 언급한 두 스프링 유형이 여기에서 효과적입니다.
이 두 필드로 리지드 바디를 끌어다 놓습니다(Bullet은 소프트 바디도 허용).
두 오브젝트를 오브젝트 A와 오브젝트 B 필드로 끌어다 놓을 수 있습니다. 두 필드를 모두 차지하면 "actio = reactio" 원칙에 따라 두 오브젝트에 힘 또는 토크가 가해집니다.
두 필드 중 하나를 비워두면 "actio = reactio" 원칙이 무시되고 힘 또는 토크가 사실상 아무 데서나 작용합니다.
두 오브젝트를 오브젝트 A와 오브젝트 B에 할당하는 순서는 회전 방향을 제외하고는 중요하지 않습니다.
각도를 측정하는 모든 곳에 기준축이 필요합니다. 이는 토션 스프링의 경우입니다.
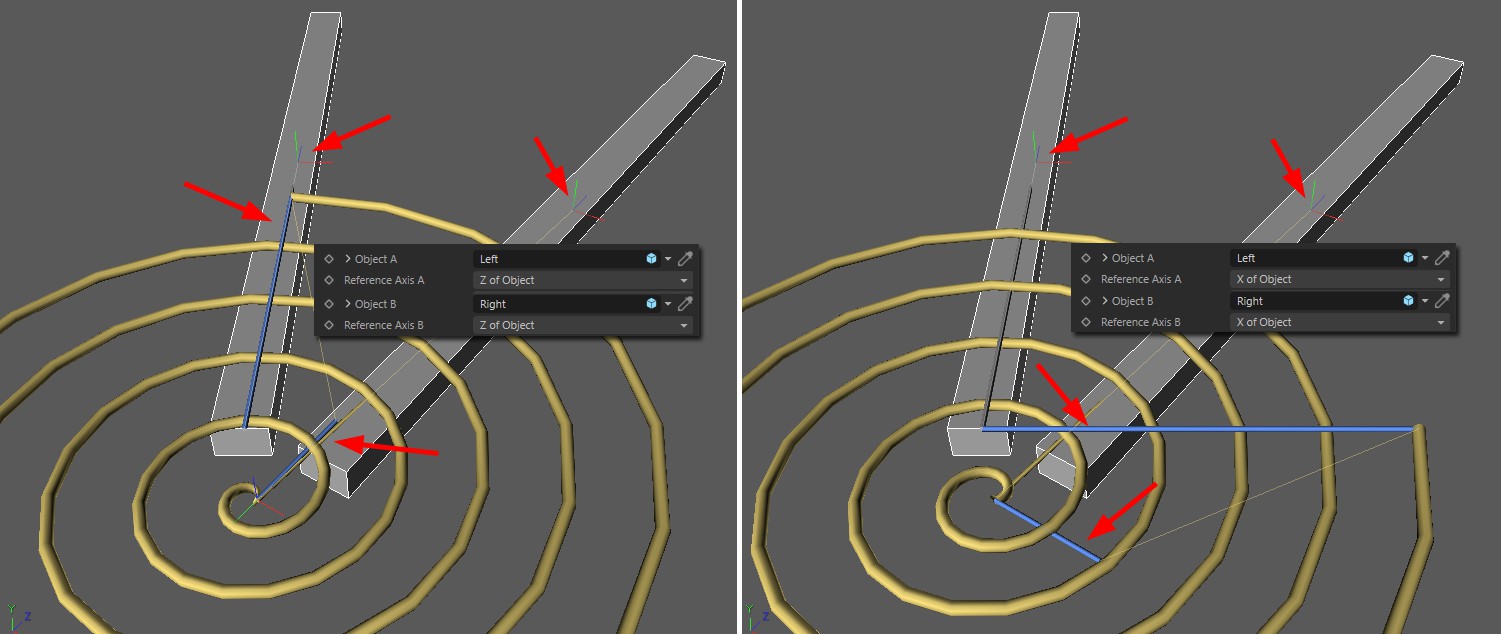
두 개의 파란색 "스프링 끝"이 각각 정의된 축(연결된 객체)에 맞춰 정렬되어 있는 것을 주목하세요. 이 경우 오브젝트-Y축은 거의 의미가 없습니다.
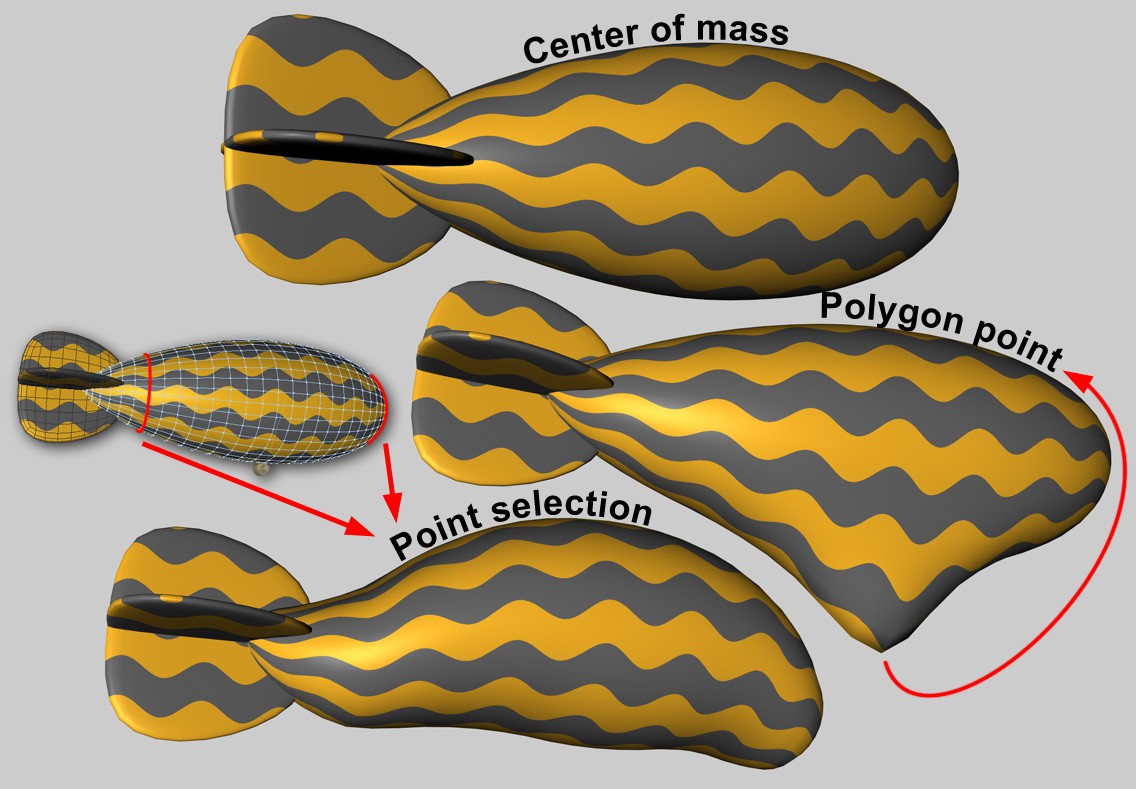
물체에 힘이 가해질 때마다 어느 물체 영역에 힘이 가해지는지가 중요할 때가 있습니다. 힘이 질량 중심 바깥에서 작용하면 자동으로 토크가 발생하고 물체가 회전을 시도합니다.
소프트 바디는 더 어렵습니다. 각 객체 포인트는 스프링을 통해 다른 포인트에 연결됩니다. 한 지점에만 힘이 가해지면 결과가 보기 흉할 수 있습니다. 여기에서 더 넓은 영역에 걸쳐 효과를 시작할 수 있습니다.
이 옵션에는 다른 매개 변수가 없으며, 힘은 질량 중심에 작용합니다. 소프트 바디를 사용하면 변형이 발생하지 않습니다.
이 옵션을 선택하면 힘이 가해지는 객체 포인트를 정의할 수 있습니다. 영향력 영역은 이 오브젝트 포인트 주변의 더 넓은 영역으로 힘 적용을 확장하는 데 사용할 수 있습니다. 이는 소프트 바디에만 해당됩니다. 이 설정은 리지드 바디/커넥터 조합에는 의미가 없습니다.
힘은 맵(포인트 선택 태그 또는 버텍스 맵)으로도 적용할 수 있습니다. 그런 다음 선택한(또는 가중치가 적용된) 포인트의 모양이 전체적으로 얼마나 변경될 수 있는지를 조절하는 몇 가지 추가 매개변수가 있습니다.
객체 인덱스 번호입니다. 내부적으로 폴리곤 오브젝트의 모든 오브젝트 포인트(생성된 모든 오브젝트에 대해서도)는 연속적으로 번호가 매겨집니다. 값을 여기에서 실행하면 뷰포트에 대화형으로 표시됩니다.
우연히도 모든 객체 포인트(하지만 여기서는 진정한 폴리곤 객체에만 해당)는 구조 관리자에 나열됩니다.
여기에 포인트 선택 태그 또는 버텍스 맵을 끌어올 수 있습니다.
소프트 바디가 단일 객체 지점에서 힘 적용을 처리하기 쉽지 않기 때문에(이것은 종종 비현실적으로 보임) 영향 영역을 사용하여 힘이 선형적으로 감소하는 효과로 적용되는 이 지점 주변의 조정 가능한 영역을 정의할 수 있습니다. 값이 100%이면 전체 메쉬가 기록되고, 폴리곤 지점(또는 지점 선택)은 100%로 웨이트가 지정되고 가장 먼 지점은 0%로 웨이트가 지정됩니다. 값이 낮을수록 힘 적용에 반응하는 지점이 점점 줄어들고, 값이 약 1%이면 하나의 지점 또는 선택만 영향을 받습니다(더 큰 값은 보호 메커니즘으로 인해 내부적으로 효과가 있음).
반면, 지점 선택으로 정의된 더 큰 영역(커넥터를 통해 엔드 포인트 회로에 연결된 관형 소프트 바디를 생각해 보세요)을 커넥터, 스프링 또는 모터에 결합하려는 경우 작은 값이 유용할 수 있습니다.
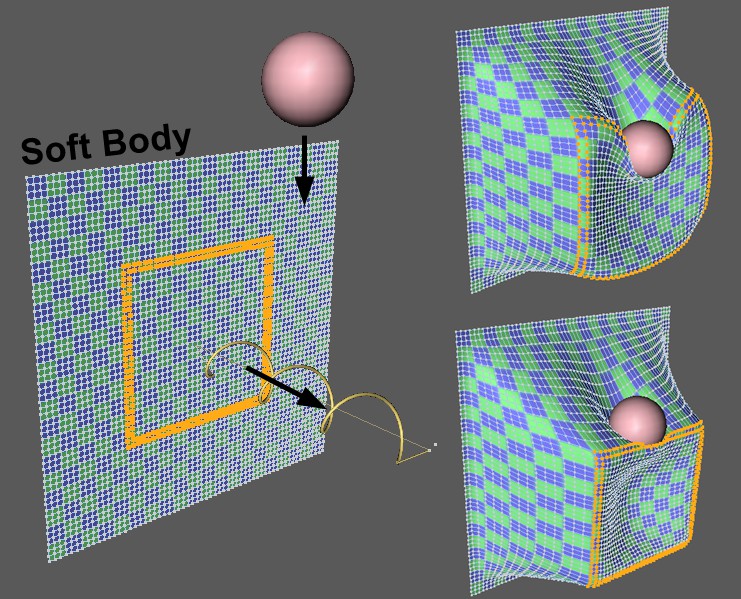 소프트 바디의 표시된 포인트 선택은 스프링에 의해 당겨지는 동시에 공이 선택 영역에 떨어집니다. 오른쪽 상단의 값은 작을수록, 오른쪽 하단의 값은 클수록 모양 유지에 적합합니다.
소프트 바디의 표시된 포인트 선택은 스프링에 의해 당겨지는 동시에 공이 선택 영역에 떨어집니다. 오른쪽 상단의 값은 작을수록, 오른쪽 하단의 값은 클수록 모양 유지에 적합합니다.
이 값을 사용하여 힘을 가할 때 선택 영역 또는 버텍스 맵의 영향을 받는 점 지오메트리가 변형될 수 있는 범위를 정의합니다. 작은 값은 강한 변형을, 큰 값은 점점 더 약한 변형을 허용합니다.
모양 유지 기능은 스프링을 통해 내부적으로 작동하며, 여기에서 댐핑을 조정할 수 있습니다. 작은 값은 큰 값보다 진동이 더 느리게 감쇠합니다.
이미 오브젝트 A에서 언급했듯이오브젝트 A "actio = reactio"는 두 오브젝트에 모두 적용됩니다. 두 오브젝트 중 하나에만 물리적으로 잘못된 방식으로 힘이나 토크를 적용하려는 경우(대부분 애플리케이션에서 관련이 없어야 함) 이 선택 메뉴에서 이를 정의할 수 있습니다.
스프링의 정지 길이는 스프링이 힘을 가하지 않는 스프링 길이입니다. 정지 길이 설정 버튼을 사용하여 현재 스프링 길이를 정지 길이로 설정할 수 있습니다. 각도 스프링의 경우 유사한 매개변수인 정지 각도 및 정지 각도 설정으로 작업합니다.
스프링 강성(물리학에서는 스프링 상수라고도 함)은 길이가 정지 단계에서 변경될 때 스프링이 가하는 힘이 얼마나 큰지 정의합니다. 스프링이 단단할수록 길이를 따라 압축하거나 늘리기가 더 어려워집니다(그리고 스윙이 더 빠릅니다).
모든 실제 스프링은 어느 시점에서 스윙을 멈춥니다. 스프링의 재료 마찰이 이를 담당합니다. 감쇠를 사용하여 이 효과를 조정할 수 있습니다. 감쇠가 0이면 스프링이 무한정 진동합니다(해당 오브젝트에 감쇠가 정의되어 있지 않은 경우). 감쇠가 클수록 진동 중에 스프링이 더 빨리 정지합니다.
또한 감쇠는 시뮬레이션 설정이 폭발하는 것을 방지하는 데 중요합니다. 감쇠는 시스템에서 에너지를 흡수하여 움직임이 축적되지 않도록 합니다. 감쇠는 시스템에서 에너지를 흡수하여 움직임이 축적되지 않도록 합니다.
스프링의 변형 및 파손
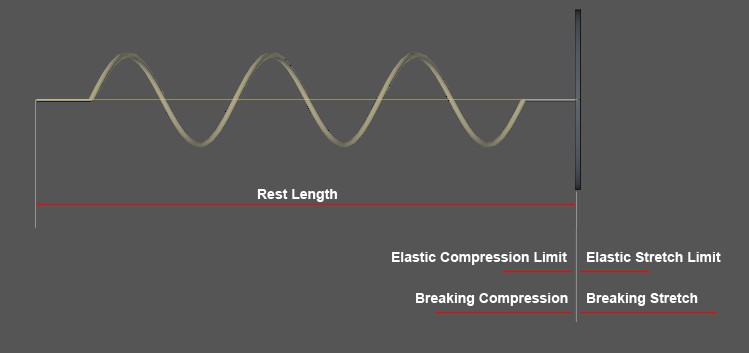 여기에 입력할 값은 스프링 정지 길이로부터의 처짐을 참조합니다. 각도 스프링 값은 각도 처짐과 관련하여 동일한 방식으로 작동합니다.
여기에 입력할 값은 스프링 정지 길이로부터의 처짐을 참조합니다. 각도 스프링 값은 각도 처짐과 관련하여 동일한 방식으로 작동합니다.
스프링이 여기에 정의된 길이/각도(정지 길이 또는 정지 각도에서 시작) 아래로 늘어나는 한, 스프링은 완전히 탄성적으로 동작하고 적용된 힘이 제거된 후 정지 위치 또는 정지 각도로 돌아갑니다. 한계 값을 초과하면 스프링이 가소적으로 변형됩니다. 즉, 힘이 해제된 후 정지 위치로 돌아가지 않고 변형된 상태로 유지됩니다.
간단한 계산 예: 정지 길이가 100cm이고 탄성 신장 한계가 20cm인 스프링이 있습니다. 이제 스프링을 150cm 길이로 당깁니다. 힘이 제거된 후 스프링은 새로운 정지 길이인 150cm - 20cm = 130cm로 스윙합니다.
스프링이 여기에 설정된 한계(원래 정지 길이 또는 정지 각도 기준)를 넘어 늘어나거나 압축되면 끊어집니다. 즉, 비활성화되었거나 더 이상 존재하지 않는 것처럼 동작합니다.