Node Properties
In the Attribute Manager, choose the collision detection mode:
In this mode, the node checks whether the bounding boxes of the two objects intersect each other. If you want child objects to be taken into account as well, in the Attribute Manager enable Include Children. The two bounding boxes will be expanded if necessary to enclose the child objects as well.
A virtual sphere is placed around each of the objects. If these two virtual spheres intersect, the node detects a collision. If Include Children is enabled in the Attribute Manager, these two virtual spheres will also enclose the child objects.
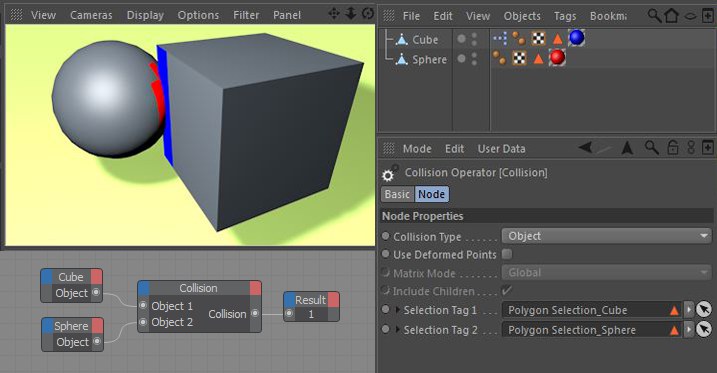
This mode detects collisions between the two objects at the polygon level. This is the most accurate type of collision detection but also the most CPU-intensive. In this mode, you can also apply materials to the surfaces that are colliding. To do this, create a Polygon Selection tag each for the two objects then Drag & drop these tags into the Selection tag boxes in the Attribute Manager. The node will now store the polygons that are colliding in these Selection tags.
Detects a collision when the surfaces of the two objects are within a certain distance of each other. This distance is defined by the Tolerance input port.
In this mode, the Tolerance input port defines a distance around each object. This distance increases the virtual size of the objects for the purposes of collision detection. If, taking their virtual sizes into account, the objects then intersect each other, a collision is detected.
If the objects colliding are deformed, enable Use Deformed Points to ensure accurate collision detection. The Matrix Mode settings in the Attribute Manager are only relevant when the node outputs the point positions of the objects.
If the objects colliding are deformed, enable Use Deformed Points to ensure accurate collision detection. The Matrix Mode settings in the Attribute Manager are only relevant when the node outputs the point positions of the objects.
You can select between local and global point coordinates (for the Point 1 and Point 2 output ports.
When active, the virtual collision sphere will also be placed around existing child objects when using the sphere collision type.
The Collision node can be applied to deformed objects, and collisions will be detected, when Use Deformed Points is active. The Attribute Manager settings for the Matrix mode are only relevant if the objects’ point positions are output.
Make sure to set the XPresso tag’s priority to Generators 1 so the tag will calculate (internally) the Deformers.