Connecteur
![]()
Les connecteurs limitent le mouvement/la rotation des Corps rigides et des Corps souples. Les Connecteurs peuvent donc être utilisés seulement sur des objets auxquels une propriété dynamiques de corps a été affectée.
Sans connecteur, les Corps rigides/souples ne seraient pas affectés par les forces et les collisions. Par exemple, il serait très difficile d'affecter une simple fonction charnière. Avec un connecteur Charnière, cela ne pose aucun problème.
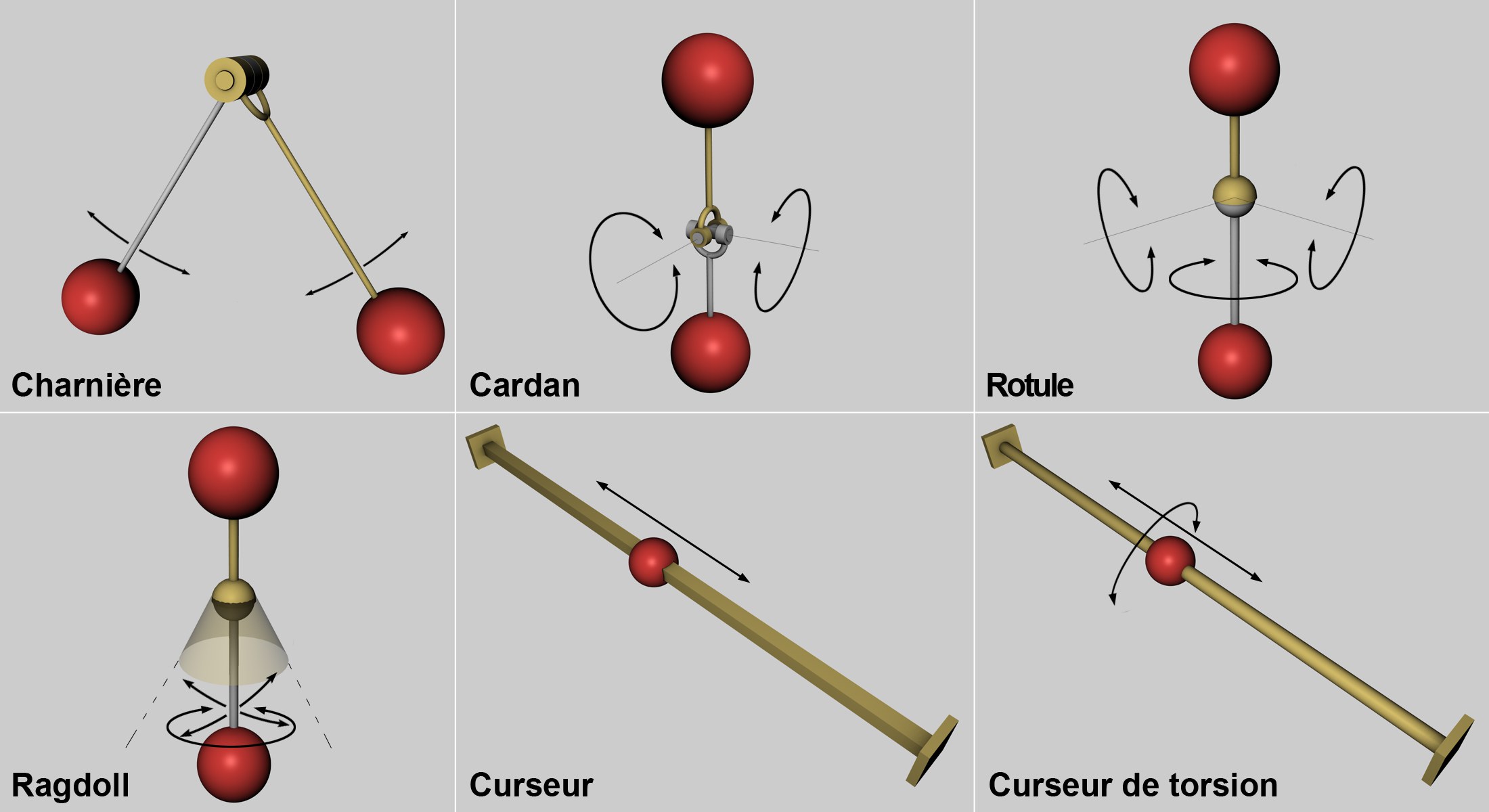 Plusieurs connecteurs disponibles. Les flèches montrent la direction dans laquelle les objets peuvent être déplacés ou pivotés. Les caractéristiques de mouvement de ceux qui ne sont pas affichés - Planaire, Boîte et Suspension de roue - sont des combinaisons de ceux ci-dessous.
Plusieurs connecteurs disponibles. Les flèches montrent la direction dans laquelle les objets peuvent être déplacés ou pivotés. Les caractéristiques de mouvement de ceux qui ne sont pas affichés - Planaire, Boîte et Suspension de roue - sont des combinaisons de ceux ci-dessous.
Les connecteurs sont affichés dans la fenêtre de façon à ce que vous puissiez facilement reconnaître quel mouvement ou rotation ce connecteur particulier a à offrir. Les connecteurs qui ne fonctionneront pas (par exemple si l'option Dynamique est désactivée, si au moins l’un des objets a une propriété Dynamiques de corps attribuée, ou si les objets en question n’ont pas encore été affectés)
seront affichés en rouge.
Comment créer un connecteur?
-
Sélectionnez Connecteur à partir du menu principal:
-
Déplacez ou faites pivoter le connecteur en position dans la fenêtre (à l'endroit où vous souhaitez placer la charnière ou parallèlement à l'axe du curseur)
- Dans les réglages du paramètre Connecteur (onglet Objet), utilisez les champs de l'Objet A et de l' Objet B pour lier les objets aux propriétés Corps.
Position du connecteur
La position et l'orientation du connecteur sont importantes.
Ces réglages définissent les axes de déplacement et de rotation. Si vous regardez l'image ci-dessus, la direction dans laquelle les sphères liées à la Charnière peuvent pivoter est définie par la position de la charnière. Il en va de même pour le connecteur Curseur, dont la position définit la direction dans laquelle la sphère peut traverser.
La plupart du temps, une charnière peut être placée le long de l'axe de rotation. Regardez la scène d'exemple qui contient 2 cylindres et 2 cubes, chacun comportant une propriété dynamique de corps:
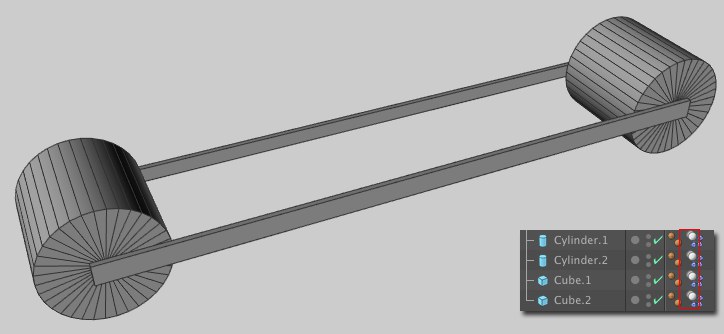 Ces quatre primitives seront utilisées pour créer un engin capable de fonctionner.
Ces quatre primitives seront utilisées pour créer un engin capable de fonctionner.
Sans connecteur, ces éléments s'effondreraient tout simplement sans interagir entre eux (à part des collisions fortuites). Afin de construire un engin, vous aurez besoin de quatre connecteurs Charnière qui relient les deux cubes aux axes de rotation. Créez 4 Connecteurs Charnière. Deux seront liés à l'axe de rotation du premier cylindre et deux seront liés à l'axe de rotation du deuxième cylindre (la fonction Transfert est très utile ici). L'endroit où se trouvent les connecteurs sur l'axe de rotation n'a pas d'importance - ils peuvent être déplacés par rapport à l'axe sans affecter la fonctionnalité. A des fins d'organisation, toutefois, c'est mieux de les positionner à l'endroit voulu. Dans cet exemple, ce serait à l'endroit où les cubes sont reliés au cylindre. Ensuite, vous devez lier les cylindres et les cubes (bien sûr aux points de rotation souhaités) dans les réglages de rotation (onglet Objet):
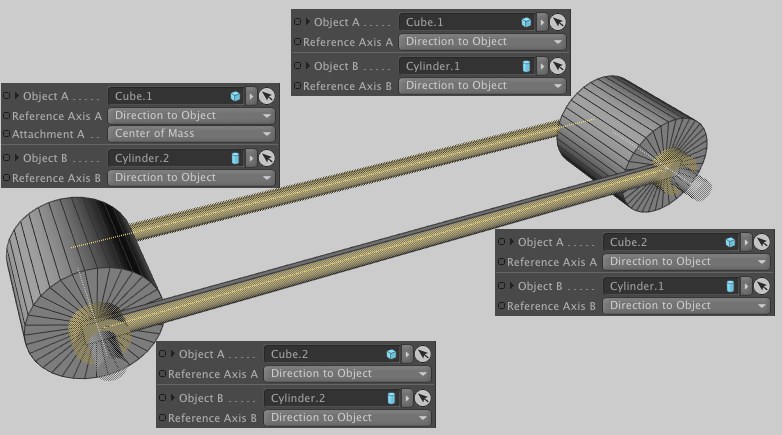
Vous avez presque créé un engin capable de fonctionner qui peut, par exemple, faire descendre un avion. Les quatre objets forment un seul et même objet aux cylindres pivotants. Cet engin peut maintenant être combiné avec un actionneur tel qu'un Moteur, qui lui permet d'aborder l'inclinaison.
Combiner des connecteurs
2 connecteurs peuvent aussi être combinés, par exemple un Curseur peut être lié à un Charnière , comme dans l'exemple suivant:
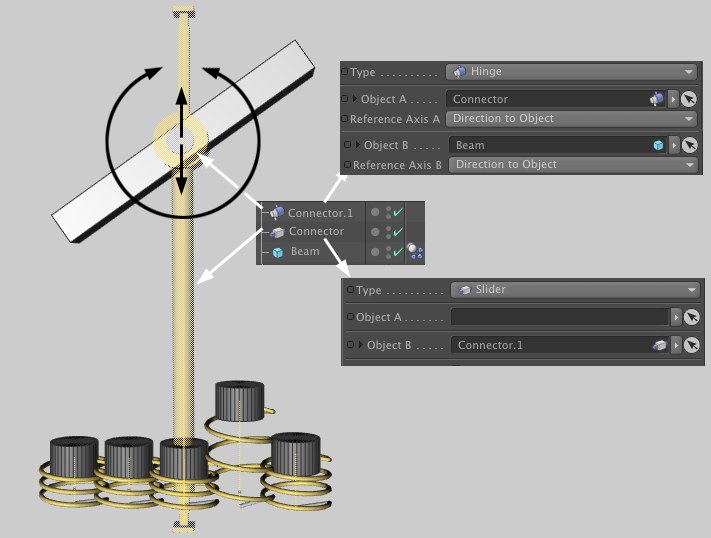 Un Connecteur Charnière relié à un Connecteur Curseur.
Un Connecteur Charnière relié à un Connecteur Curseur.
Les ressorts du bas, dont l'état au repos change par randomisation, éjecte le faisceau dans l'air. Le "Connecteur" assure que le faisceau ne se déplace que verticalement. Afin de laisser aussi le faisceau pivoter, il a été relié à un connecteur Charnière ("Connecteur.1"). C'est tout ce dont vous avez besoin pour créer ce travail artistique perpétuel.
La combinaison directe de deux connecteurs linéaires (par exemple, Curseur) ou de rotation (par exemple, charnière, cadran, rotule, Ragdoll, ball et rotule) est impossible à cause de restrictions mathématiques.
En général, il vaut mieux éviter de combiner trop de connecteurs. Sinon, la structure des éléments peut devenir très confuse. Normalement, toutes les parties amovibles d'une scène donnée sont modélisées et des connecteurs individuels suffiront pour créer le mouvement souhaité. La roue d'une voiture, par exemple, est reliée à l'axe de la voiture, autour duquel elle tourne. Vous n'avez besoin que d'un Connecteur Charnière pour réaliser la fonctionnalité souhaitée.
Dupliquer des objets liés à des Connecteurs
Un système Dynamics complet, Connecteurs, Ressorts et Moteurs inclus, ainsi que leurs éléments associés, peuvent être dupliqués. Pour cela, tous les éléments doivent être placés à l'intérieur d'un objet Neutre commun et celui-ci doit à son tour devenir un sous-objet du générateur.
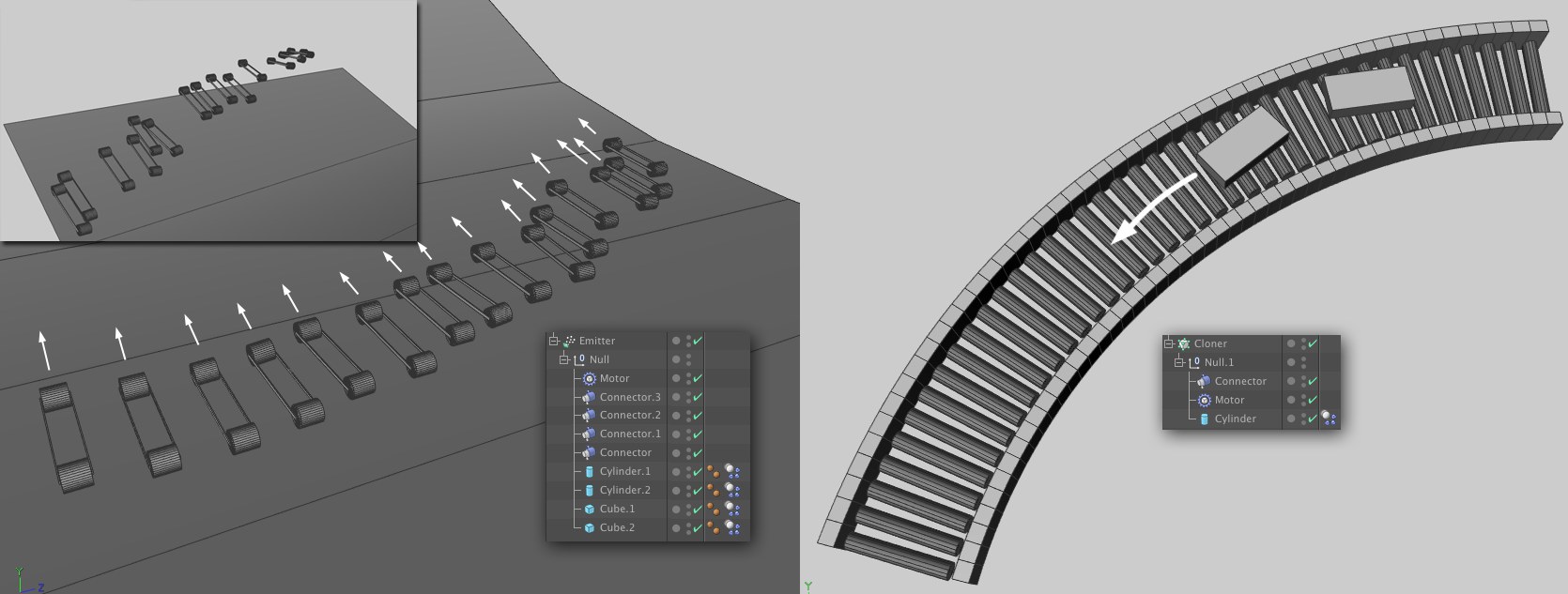
A gauche de l'image ci-dessus, un véhicule a été équipé d'un Moteur et la construction entière a été transformée en sous-objet d'un Emetteur. L'Emetteur règles les véhicules sur libre pour qu'ils puissent circuler indépendamment. A droite se trouve un simple cylindre, aussi propulsé par un Moteur et cloné en une forme courbe à l'aide d'un objet Clone. Cela donne un transporteur en marche.
Assurez-vous de donner aux objets de collision non affectés par les Dynamics (comme l'avion à gauche ou les pistes à droite) la bonne forme (la plupart du temps Forme Maillage statique) pour que la vraie forme soit utilisée pour la collision et pas un simple substitut.
Des connecteurs imprécis?
Si vous avez l'impression que les connecteurs ne font pas exactement ce qu'ils sont censés faire, vous pouvez vous concentrer sur les paramètres de calcul des Dynamiques qui contrôlent la précision. Les paramètres les plus importants sont: Etapes par image, Itérations maximum du solveur par étape et Seuil erreur.
L'imprécision peut aussi être due à une grande différence dans la masse des objets (cela se produit aussi si la Forme a été réglée sur Désactivé dans l'onglet Collision de la propriété dynamique de corps). En général, les simulations physiques n'aiment pas cela.