Objekt-Eigenschaften
Ein Konnektor verhält sich je nach hier definiertem Typ völlig unterschiedlich. Je nach Typ können unten zusätzliche Parameter eingeblendet werden.
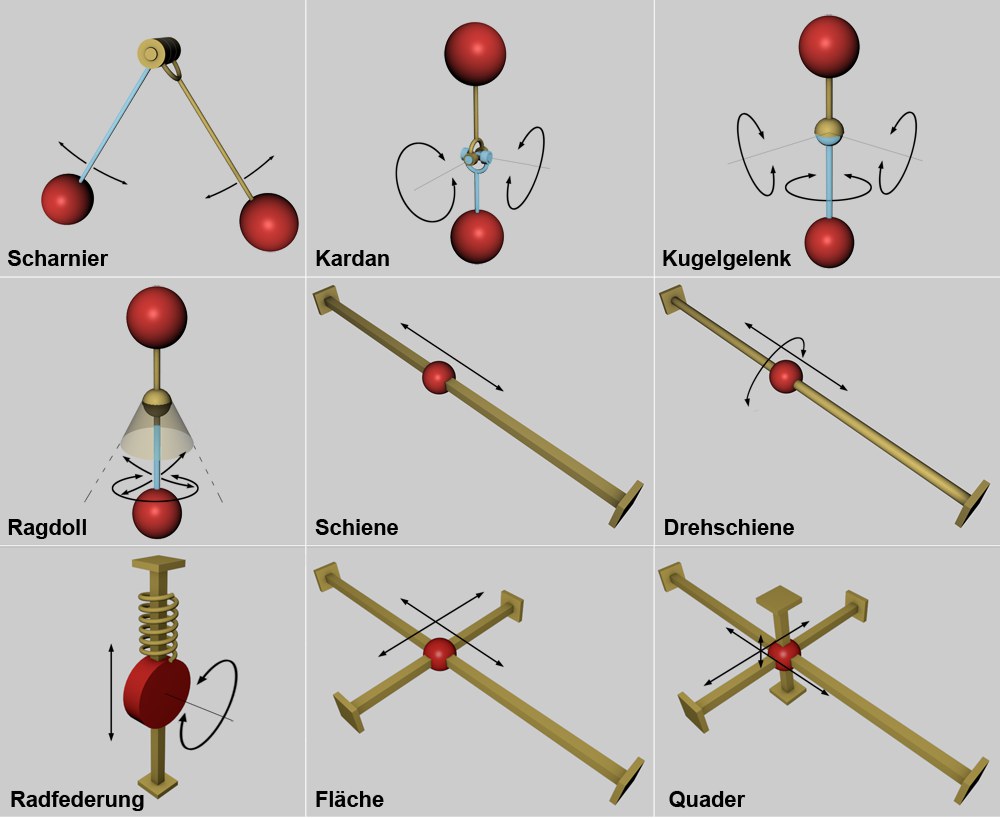 Mögliche Bewegungsrichtungen verschiedener Konnektoren.
Mögliche Bewegungsrichtungen verschiedener Konnektoren.Ein Scharnier lässt ausschließlich eine Drehbewegung um den Scharniermittelpunkt zu. Die Drehbewegung findet ausschliesslich in der Ebene statt, die durch die X- und Y-Achse des Konnektors aufgespannt wird.
Der Bewegungswinkel kann eingeschränkt werden.
Ein Kardangelenk besteht im Prinzip aus 2 Scharnieren, die an einem Kreuz um 90° versetzt befestigt sind. Dadurch ergeben sich relativ komplizierte Bewegungen.
Der klassische Anwendungsfall eines Kardangelenks ist die Drehmomentübertragung um die Ecke. Damit das funktioniert, müssen 2 Voraussetzungen gegeben sein:
- die Drehachsen der beiden verbunden Objekte müssen sich schneiden
- der Konnektor muss exakt auf dem Schnittpunkt der beiden Drehachsen liegen
Das Kardangelenk kann in beiden Drehachsen winkelbeschränkt werden.
Ein Kugelgelenk lässt Drehung in allen 3 Dimensionen zu. Ein Schultergelenk im menschlichen Körper ist z.B. ein Kugelgelenk.
Ein Ragdoll- Konnektor ist ein Kugelgelenk (s.o.) mit kegelförmiger, einstellbarer Winkelbeschränkung. Zusätzlich kann eine Winkelbeschränkung der Hochachsendrehung von Objekt B definiert werden.
Der Begriff "Ragdoll" ("Stoffpuppe") spiegelt den Verwendungszweck des Konnektors wider: er lässt sich z.B. für einige menschliche Gelenke wie Hüft- oder Schultergelenk einsetzen:
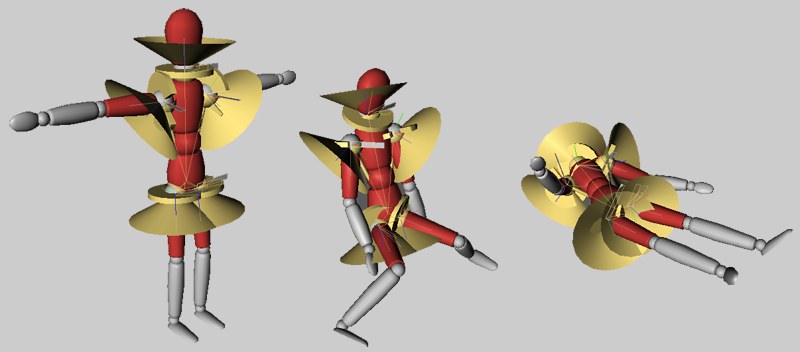 Der Ragdoll- Konnektor sorgt für natürliche, menschliche Gelenkbewegungen.
Der Ragdoll- Konnektor sorgt für natürliche, menschliche Gelenkbewegungen.Eine Schiene beschränkt mögliche Bewegungsrichtungen auf lediglich eine Achse, nämlich die Konnektor-Z-Achse.
Die Bewegungsfreiheit kann längenmäßig beschränkt werden.
Eine Drehschiene beschränkt mögliche Bewegungsrichtungen auf lediglich eine Achse, nämlich die Konnektor-Z-Achse. Zusätzlich kann um die Schienenachse rotiert werden.
Die Bewegungsfreiheit kann sowohl längenmäßig, als auch in der Rotation beschränkt werden.
Eine Fläche lässt nur Bewegungen in der X-Y-Ebene des Konnektors zu.
Die Bewegungsfreiheit lässt sich in alle 4 Richtungen einschränken.
Ein Quader lässt alle Bewegungsrichtungen zu, kann aber in alle 6 Richtungen beschränkt werden.
Dieser Modus fällt etwas aus dem Rahmen. Er lässt Bewegungen in Konnektor-Y-Richtung, sowie Rotation um die Konnektor-Z-Achse zu. Soweit nichts Ungewöhnliches. Aber es wirkt zusätzlich eine Feder (entlang der Konnektor-Y-Achse). Sie können damit sehr einfach und schnell dynamische, federnde und sogar lenkbare Radkonstruktionen erstellen, womit der Erstellung von fahrbaren Untersätzen nichts mehr im Weg steht
Hiermit werden überhaupt keine Bewegungen mehr zugelassen. Damit können Sie quasi Objekte an andere nageln.
Eine Alternative wäre, beide Objekte nicht per Konnektor zu verbinden, sondern das eine zum Unterobjekt des anderen zu machen und dann dieses zusammengesetzte Objekt als Dynamics-Objekt zu sehen (Hierarchie
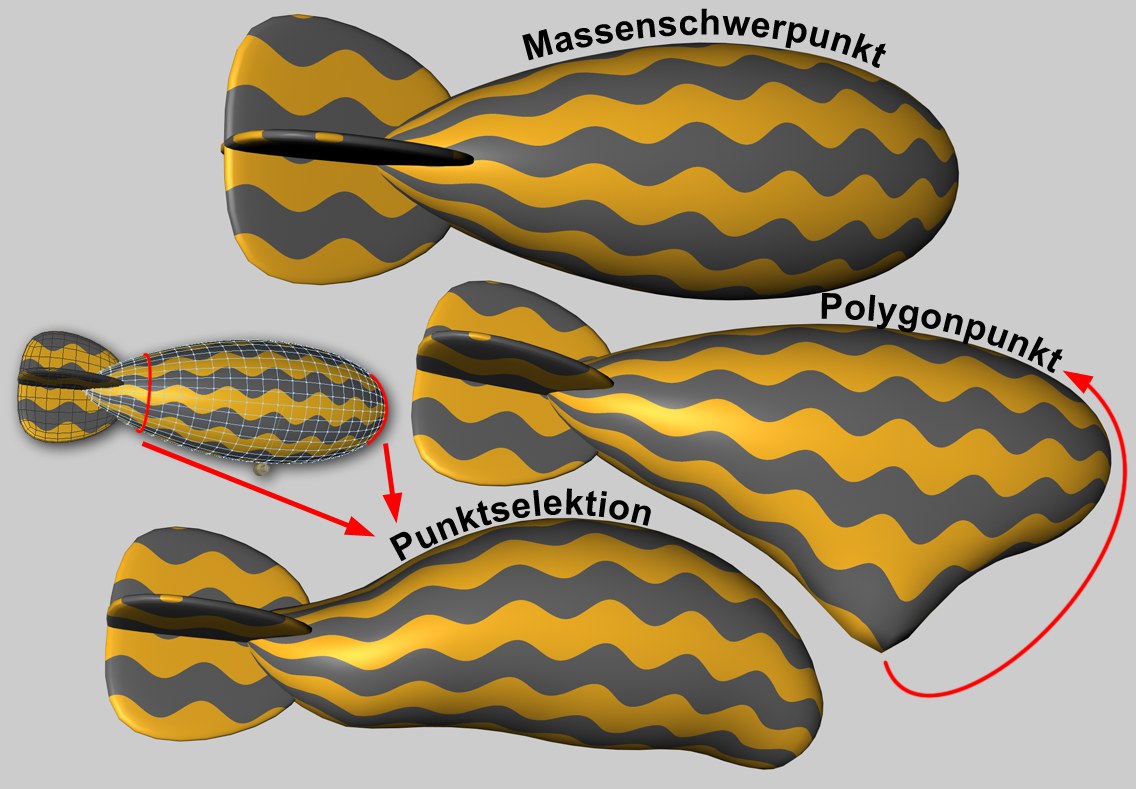 Ein aufwärts steigender Zeppelin wird von einem Konnektor mit verschiedenen Bindungen gehalten. Richtig, bei Massenschwerpunkt tut sich nichts.
Ein aufwärts steigender Zeppelin wird von einem Konnektor mit verschiedenen Bindungen gehalten. Richtig, bei Massenschwerpunkt tut sich nichts.Überall dort, wo Kräfte in ein Objekt geleitet werden, ist es mitunter wichtig, in welchem Objektbereich das geschieht. Schiebt beispielsweise der Motor im Massenschwerpunkt, resultiert das in einer geradlinigen Bewegung des Rigid Body (sofern keine anderen Kräfte wirken). Greift die Kraft außerhalb des Massenschwerpunkts an, wird automatisch ein Drehmoment erzeugt und das Objekt versucht sich zu drehen.
Schwieriger wird’s beim Soft Body. Dort ist ja jeder Objektpunkt über Federn mit anderen Punkten verbunden. Greift die Kraft in nur einem Punkt an, kann es zu unschönen Ergebnissen kommen. Hier ist es möglich, die Wirkung über größere Bereiche einzuleiten.
Bindung A/B gibt es für diese Dynamics Objekte:
- Konnektoren
- Motoren
- Federn
Für diese Option gibt es keine weiteren Parameter, die Kraft wirkt im Massenschwerpunkt. Bei Soft Bodies hat das keine Verformung zur Folge.
Bei Auswahl dieser Option kann ein Objektpunkt bestimmt werden, wo die Kraft eingeleitet wird. Über Einflussbereich kann die Krafteinleitung auf einen größeren Bereich um diesen Objektpunkt ausgedehnt werden. Das ist nur für Soft Bodies von Bedeutung. Bei der Kombination Rigid Bodies/Konnektoren hat diese Einstellung keine Bedeutung.
Krafteinleitungen können auch per Map (Punkt-Selektions-Tag oder Vertex-Maps) vorgenommen werden. Es gibt hierbei dann einige zusätzlicher Parameter, die regeln, wie stark sich dann die Gestalt der selektierten (bzw. gewichteten) Punkte als ganzes ändern darf
Die beiden Felder Objekt A/B finden Sie bei diesen dynamischen Objekten:
- Konnektor
- Motor
- Feder
Diese 3 Objekte verbinden jeweils 2 Objekte auf verschiedene Arten und Weisen.
Die beiden Objekte können in die Felder Objekt A und Objekt B gezogen werden.
Wenn Sie eins der beiden Felder leer lassen, bedeut das für:
- Konnektoren: Position und Winkel der Konnektoren sind fixiert (ansonsten bewegt/dreht sich der Konnektor mit den Objekten mit).
- Motoren: der Grundsatz "actio = reactio" ist außer Kraft gesetzt; die Kraft bzw. das Drehmoment wirken quasi aus dem Nichts heraus (s.u.).
- Feder: eines der Federenden liegt im Weltursprung.
Wie die beiden zu verbindenden Objekte in der Reihenfolge Objekt A und Objekt B zugewiesen werden, spielt bis auf den Konnektorentyp Ragdoll und Radfederung keine Rolle.
Für den Motor gilt für ein freigelassenes Feld: Nach den Regeln der Physik ("actio = reactio") hat jedoch jede durch ein Objekt wirkende Kraft bzw. jedes Drehmoment eine entgegengesetzte Komponente am jeweils anderen Objekt. Dieses Prinzip wird erfüllt, wenn Sie beide Felder füllen. Bestes Beispiel ist ein Hubschrauber: Der Rotor wird von einem Motor angetrieben und dreht sich dementsprechend. Gleichzeitig wirkt ein entgegengesetztes Drehmoment am Hubschrauberrumpf. Um dieses auszugleichen, gibt es den Heckrotor. Ansonsten würde sich der Rumpf ständig um die Hochachse drehen.
Referenzachse A
Referenzachse B
Referenzachsen werden überall dort benötigt, wo Winkel gemessen werden. Dies ist bei einem Konnektor mit Drehbewegungen und auch einer Drehfeder der Fall. In beiden Fällen kann die Drehbewegung auf einen bestimmten Winkelbereich limitiert werden. Sowohl Konnektor als auch Drehfeder müssen jeweils passend in der Drehebene liegen.
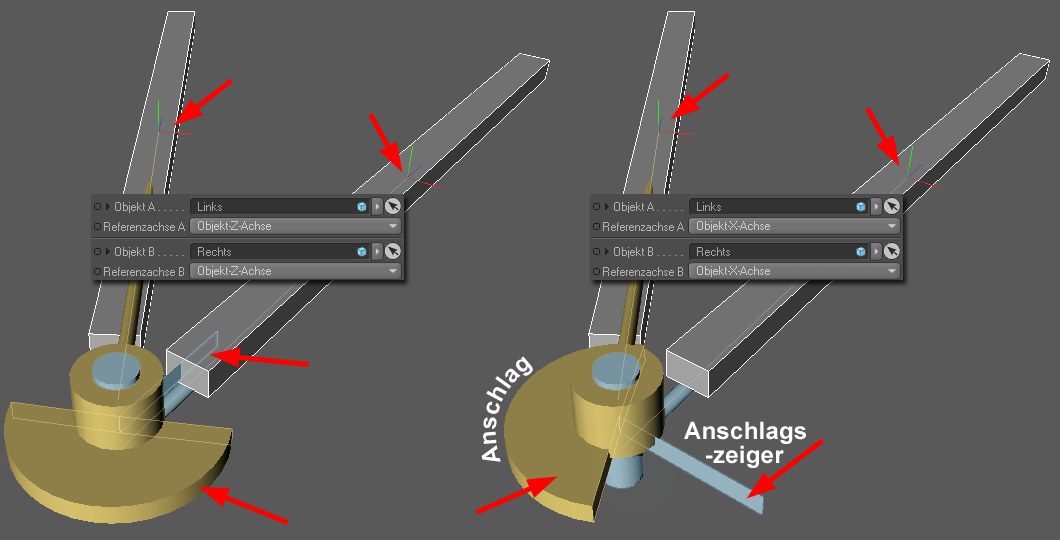
Betrachten Sie sich einmal ausführlich dieses Bild. Die Konnektoren sind beide winkellimitiert und haben daher jeweils einen Anschlag, sowie einen Anschlagszeiger. Beachten Sie jeweils, wie der Anschagszeiger (gehört jeweils zu Objekt B) sich exakt parallel zur Achse von Objekt B ausrichtet. Gleiches gilt für den Anschlag.
Sie sehen auch, dass Objekt-Y-Achse hier keinen Sinn ergeben würde, da weder Anschlag noch Anschlagszeiger sich danach ausrichten können.
Stellen Sie sich jetzt vor, der Konnektor liegt exakt auf der Objektachse von Objekt A. Wenn bei Referenzachse A Richtung zu Objekt definiert wäre, würden Sie den Konnektor ganz schön verwirren, da Konnektor und Objekt deckungsgleich wären. Hier muss dann zwangsweise eine der Objekt-Achsen definiert werden.
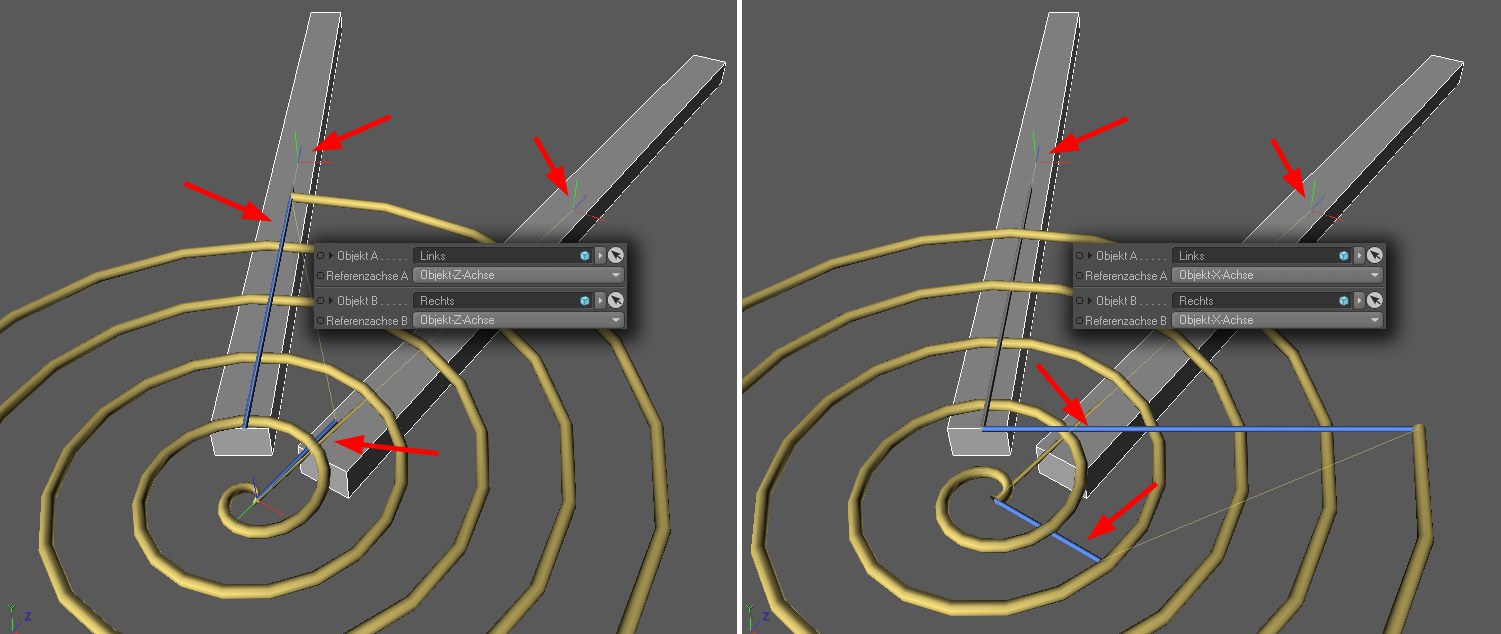
Ähnlich stellt es sich bei der Drehfeder dar: Beachten Sie, wie die beiden blauen "Federenden" sich jeweils nach der definierten Achse ausrichten. Objekt-Y-Achse würde in diesem Fall auch wenig sinnvoll sein.
In vielen Fällen müssen Sie an die Referenzachsen auch gar nicht Hand anlegen. Nur in einigen Fällen wie u.a. oben beschrieben ist das notwendig, um "Gimbal Lock"-Effekte auszuschliessen. Stellen Sie sich vor, Konnektor oder Feder sind im Vergleich zu den Abbildungen um 90° nach vorne gekippt. In diesen Winkelbereichen käme der Gimbal Lock nämlich zum Tragen. Wenig Probleme haben Sie damit, wenn Sie – wie empfohlen – Konnektoren und Drehfedern sinnvoll im Editor (nämlich gemäss ihren Drehrichtungen) ausrichten.
Das klingt alles etwas kompliziert, lässt sich aber im Endeffekt notfalls auch durch blosses Ausprobieren hinbekommen. Halten Sie beim Ändern der Einstellungen einfach Anschlag und Anschlagzeiger im Auge:
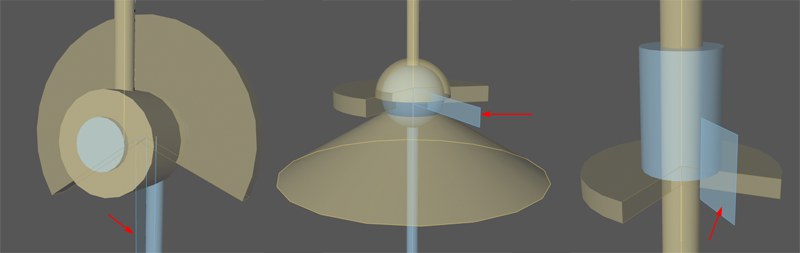
 Anschlag und Anschlagszeiger bei verschiedenen Konnektoren.
Anschlag und Anschlagszeiger bei verschiedenen Konnektoren. Index [-2147483648..2147483647]
Index [-2147483648..2147483647]
Das ist die Objektindexnummer. Intern sind alle Objektpunkte eines polygonalen Objektes (auch für alle generierten) durchnummeriert. Im Editor wird das interaktiv angezeigt, wenn Sie die Werte hier durchbrausen lassen.
Übrigens sind alle Objektpunkte (hier aber nur für wirklich polygonale Objekte) im Struktur-Manager aufgelistet.
Sie können hier ein Punkt-Selektions-Tag oder Vertex-Maps reinziehen.
Einflussbereich [1..1000%]
Einflussbereich [1..1000%]
Da es für Soft Bodies nicht ganz einfach ist, Krafteinleitungen in einem einzelnen Objektpunkt zu verarbeiten (oft sieht das unrealistisch aus), kann mit Einflussbereich ein einstellbarer Bereich um diesen Punkt definiert werden, wo die Kräfte mit linear abnehmender Wirkung eingeleitet werden. Bei Werten von 100% wird das gesamte Mesh erfasst, wobei der Polygonpunkt (bzw. die Punktselektion) mit 100% gewichtet werden und der entfernteste Punkt mit 0%. Bei kleineren Werten reagieren zunehmend weniger Punkte auf die Krafteinleitung, bei Werten um 1% wird nur ein Punkt bzw. nur die Selektion beeinflusst (wobei dann intern durch Schutzmechanismen dann doch größere Werte wirken).
Andererseits kann ein kleiner Wert dann sinnvoll sein, wenn Sie größere, durch Punktselektion definierte Bereiche (denken Sie an schlauchförmige Soft Bodies, die per Konnektor an einem Endpunktkreis befestigt sind) an Konnektoren, Federn oder Motoren gekoppelt werden wollen.
Formbewahrung [0..+∞]
Formbewahrung [0..+∞]
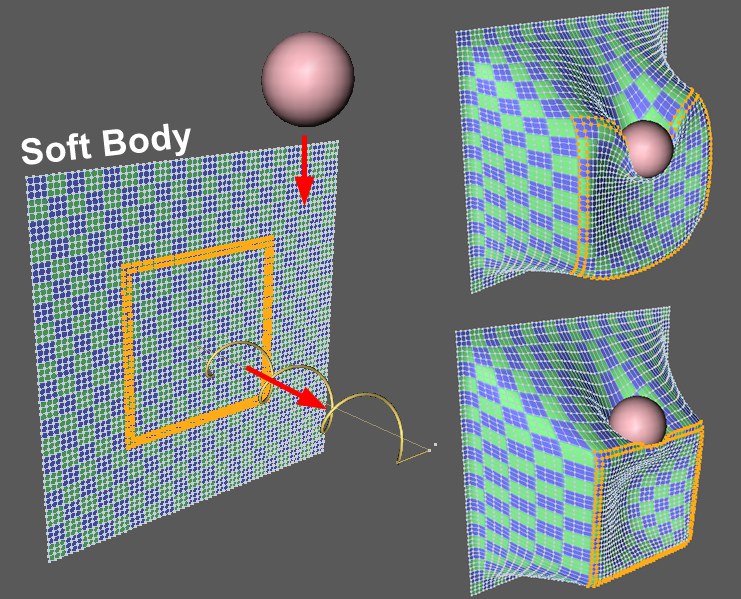 Markierte Punkt-Selektion eines Soft Bodies wird von einer Feder gezogen, gleichzeitig fällt eine Kugel auf die Selektion. Rechts oben kleiner, rechts unten großer Wert für Formbewahrung.
Markierte Punkt-Selektion eines Soft Bodies wird von einer Feder gezogen, gleichzeitig fällt eine Kugel auf die Selektion. Rechts oben kleiner, rechts unten großer Wert für Formbewahrung.Mit diesem Wert bestimmen Sie, inwieweit die Selektion bzw. die durch die Vertex-Map beeinflusste Punktgeometrie bei Krafteinleitung verformt werden können. Kleine Werte lassen starke, große Werte zunehmend weniger Verformungen zu.
Dämpfung [0..+∞%]
Dämpfung [0..+∞%]
Die Formbewahrung funktioniert intern über Federn, deren Dämpfung hier eingestellt werden kann. Kleine Werte lassen Schwingungen langsamer abklingen als große.
Diese Option gilt nur für Kollisionen zwischen den beiden vom Konnektor verbundenen Objekte. Oft während des Aufbaus einer Szene, wenn Sie prinzipielle Konnektor-Konstruktionen ausprobieren, wäre es störend, Kollisionsabfragen wirken zu lassen.
Beim Konnektortyp Ragdoll kann die Bewegung in einem kegelförmigen Raum beschränkt werden. Diesen Kegel können Sie hier in seiner Öffnung einstellen.
Ellipse
Kegelradius Y [0.1..89.9°]
Mit Aktivierung dieser Option kann der (perfekte) Kegel zu einem zusammengedrückten Kegel verformt werdern. Kegeleradius Y reguliert dann das Zusammendrücken.
Dieser und die nächsten 4 Parameter werden nur bei der Verwendung des Typs Radfederung eingeblendet.
Steuerwinkel definiert den Radeinschlag um die Y-Achse des Konnektors. Sie können hiermit also – wenn Sie diesen Parameter animieren – eine echte Fahrzeugsteuerung nachbilden.
Hiermit geben Sie – ausgehend vom Konnektorursprung – die Ruheposition der integrierten Feder an. Negative Werte stemmen das Gefährt dementsprechend nach oben.
Die Federhärte definiert, wie gross die Kräfte sind, die die Feder bei Längenänderung aus der Ruhephase ausübt. Je härter eine Feder ist, desto schwerer lässt Sie sich in der Länge zusammendrücken bzw. auseinander ziehen (und desto schneller schwingt sie).
Wie Sie es auch vom Auto her kennen, gibt es keine Feder ohne Dämpfung ("Stoßdämpfer"). Dieser sorgt dafür, dass Schwingungen schnell abklingen und der Reifen immer auf der Straße bleibt. Je größer die Federdämpfung, desto schneller kommt die Feder wieder zur Ruhe.
Sollten Sie mit Oberes Limit bzw. Unteres Limit Winkelgrenzen definiert haben, so können Sie mit diesem Parameter einstellen, wie die Bewegung zurückfedert, wenn das Objekt auf die Grenze trifft.
Unteres Limit X
Von [-∞..+∞m]
Oberes Limit X
Bis [-∞..+∞m]
Unteres Limit Y
Von [-∞..+∞m]
Oberes Limit Y
Bis [-∞..+∞m]
Unteres Limit Z
Von [-∞..+∞m]
Oberes Limit Z
Bis [-∞..+∞m]
Bei Konnektortypen, die eine Verschiebung zulassen, kann diese jeweils entlang der Achsen und ausgehend vom Konnektorursprung beschränkt werden.
Winkellimit
Winkellimit 2
Von [-∞..+∞°]
Bis [-∞..+∞°]
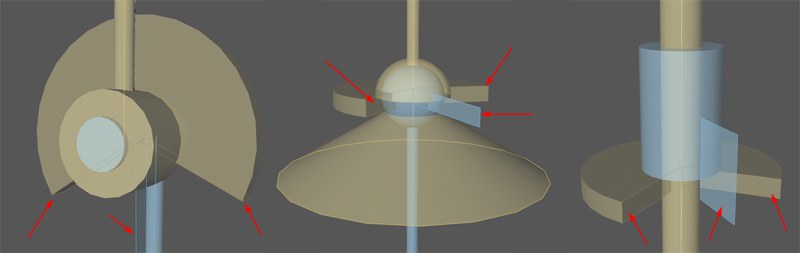
 Winkellimits bei verschiedenen Konnektoren. Der jeweils mit dem mittleren Pfeil markierte Anschlagszeiger kann sich nur innerhalb der gelben Limits bewegen.
Winkellimits bei verschiedenen Konnektoren. Der jeweils mit dem mittleren Pfeil markierte Anschlagszeiger kann sich nur innerhalb der gelben Limits bewegen.Bei fast allen Konnektortypen, die eine Drehung zulassen, finden Sie Winkelbeschränkungen, die Sie mit diesen Parametern einstellen können.
Sind keine Winkellimits definiert, so können sich die Objekte im Falle einer Drehbewegung unendlich oft um das Scharnierzentrum drehen (bei Bewegungen entlang einer Schiene unendlich in Schienenrichtung).
Beachten Sie, dass die Winkellimits nur in dem Bereich EINER Volldrehung wirken, d.h. es sind keine Beschränkungen à la "Drehe Dich um 720° und stoppe dann." möglich.
Der Konnektortyp Kardan, der 2 Drehebenen zulässt, kann mittels Winkellimit 2 zusätzlich beschränkt werden.
Brechende Kraft
Kraft [0..+∞m]
Brechendes Drehmoment
Drehmoment [0..+∞]
Beim Typ
Beachten Sie, dass Sie für die Werte mitunter je nach Szene und wirkenden Kräften hier sehr hohe Werte (fünf- bis sechsstellige sind da durchaus drin) eingeben müssen. Ein einfacher zu haltender Würfel mit den normalen Projektvoreinstellungen braucht hier schon einen Wert von ca. 1000, um allein aufgrund seiner Gewichtskraft gehalten werden zu können.
Hohe Werte machen den Konnektor stabiler, während kleinere Werte ihn früher brechen lassen.
Beachten Sie, dass Sie auch Konnektoren anderen Typs per XPresso (mttels des Nodes Dynamics Konnektorstatus) zerbrechen (und auch wieder "reaparieren" können).