Kollision
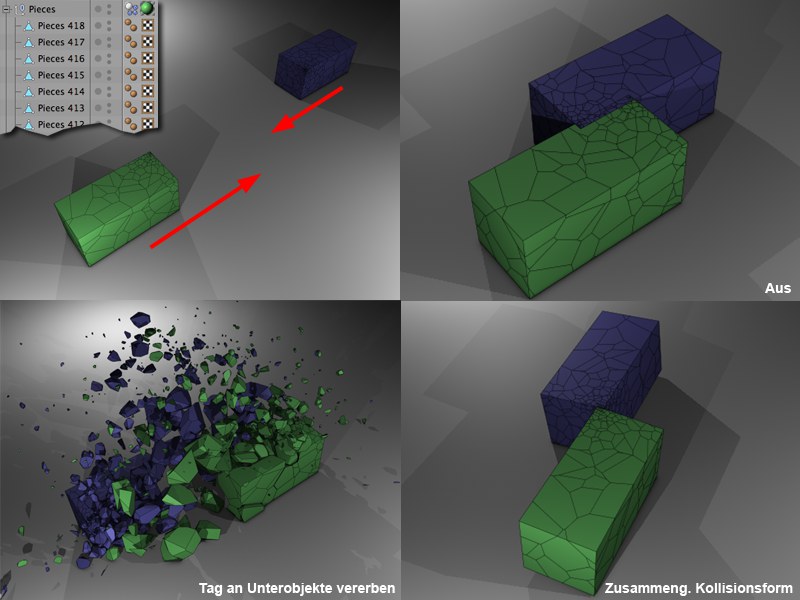 Die oben links abgebildete Hierarchie (das Tag liegt auf dem übergeordneten Null-Objekt) kollidiert mit einer gleichartigen. Verschiedene Einstellungen für Hierarchie.
Die oben links abgebildete Hierarchie (das Tag liegt auf dem übergeordneten Null-Objekt) kollidiert mit einer gleichartigen. Verschiedene Einstellungen für Hierarchie.Diese Option gilt dann, wenn das Tagtragende Objekt eine untergeordnete Hierarchie hat (und kein klonerzeugendes Objekt ist, für diese gilt das nächste Auswahlmenü) und definiert, ob eine evtl. vorhandene Hierarchie unter dem Tag tragenden Objekt ebenfalls als Kollisionsobjekt folgendermaßen berücksichtigt werden soll:
Alle unter dem Tag befindlichen Hierarchie werden bezüglich Dynamics ignoriert. Kollidieren tut nur das Tag-Objekt, das jedoch in seiner dynamischen Bewegung Unterobjekte massenlos "mitzerrt”.
Das Tag wird intern auf alle Unterobjekte verteilt. Alle Objekte reagieren dann individuell, als ob sie sich in keiner Hierarchie befänden.
Zusammengesetzte Kollisionsform
Die gesamte Hierarchie des Tag-tragenden Objekts wird als ein einzelnes, festes Objekt angesehen.
In einer Hierarchie können Sie einem der Unterobjekte ein separates Dynamics Body Tag verleihen. Wenn Sie dort die Option Aktiviert deaktivieren, arbeitet das Tag quasi als Stopp-Tag, d.h. dieses Objekt mitsamt seiner Unterobjekte wird beispielsweise aus der "Zusammengesetzten Kollisionsform” rausgenommen.
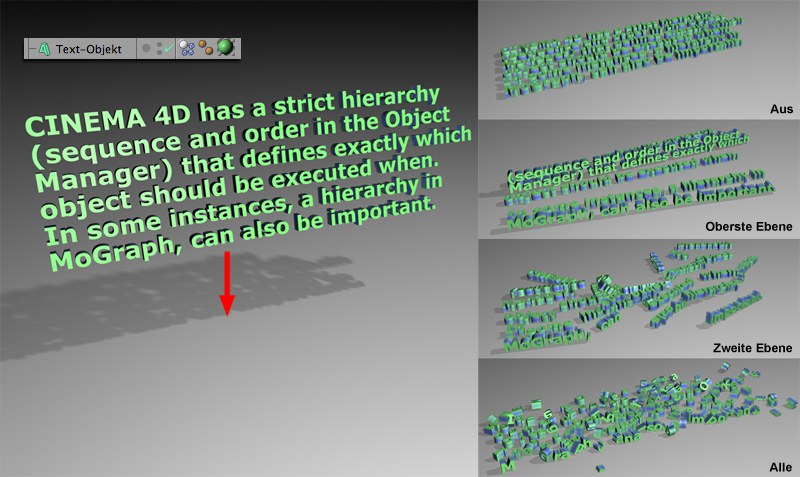 Das links abgebildete MoText-Objekt fällt zu Boden. Je nach Definition bei Individuelle Elemente kollidiert der Text als Ganzes, Zeilen-, Wort- oder Buchstaben-weise.
Das links abgebildete MoText-Objekt fällt zu Boden. Je nach Definition bei Individuelle Elemente kollidiert der Text als Ganzes, Zeilen-, Wort- oder Buchstaben-weise.Die Modi dieses Auswahlmenüs sind für Generatoren vorgesehen, die selber Objekte erzeugen, wie MoText. Es geht prinzipiell darum, wie die erzeugten Objekte kollidieren: selbstständig oder als ganzes.
Für das MoGraph MoText gilt beispielsweise bzgl. der Textkollision:
Der Gesamttext ist ein Kollisionsobjekt.
Jede Zeile ist ein Kollisionsobjekt.
Jedes Wort ist ein Kollisionsobjekt.
Jeder Buchstabe ist ein Kollisionsobjekt.
Diese Option regelt 2 Dinge:
- Bei Soft Body Verformungen wird auf Durchdringungen abgefragt. Die Deaktivierung dieser Option ist dann eine gute Maßnahme zur Optimierung der Rechengeschwindigkeit. Natürlich nur, wenn das entsprechende Objekt aufgrund seiner Form bzw. Einstellungen nicht zur Selbstkollision neigt (wie bei Reifen, Luftballons o.ä.)
- Wenn das Tag auf einem klonerzeugenden Objekt (Klon-Objekt, MoText-Objekt etc.) sitzt, regelt diese Option die Kollisionsabfrage zwischen den einzelnen Klonen.
Kollidierende Objekte können mit Deformern verformt werden, was sich natürlich auf die Kollisionsform auswirkt. Gelegentlich (z.B. beim Voronoi-Bruch-Objekt, dass mit den Parametern seines Tabs "Details" verformt werden kann) kann es vorkommen, dass die Verformung nur gering ist und aus Geschwindigkeitsgründen für Kollisionsvorgänge das unverformte Objekt herangezogen werden soll. In solchen Fällen sollte die Option deaktiviert werden.
Kollisionsabfrageberechnungen sind im Allgemeinen eine rechenzeitaufwendige Angelegenheit. Nur sie führen allerdings zu realistischen Objektbewegungen: Körper können von anderen abprallen, aufgrund von Reibung zur Ruhe kommen etc.
Je komplizierter der Körper in seiner Gestalt, desto aufwendiger ist seine Kollisionsberechnung. Es gibt deshalb in diesem Auswahlmenü einige Ersatzformen, die über das tatsächliche Objekt gestülpt werden können. Dadurch lässt sich eine Menge Rechenzeit sparen. In der Animation lässt sich von weiten oft gar nicht erkennen, ob jetzt die tatsächliche Objektgestalt zur Kollisionsberechnung herangezogen wurde oder nur ein automatisch auf die Objektgröße angepasster Quader.
In den Visualisierungseinstellungen können Sie sich mit der Option Kollisionsformen übrigens die Formen einblenden lassen.
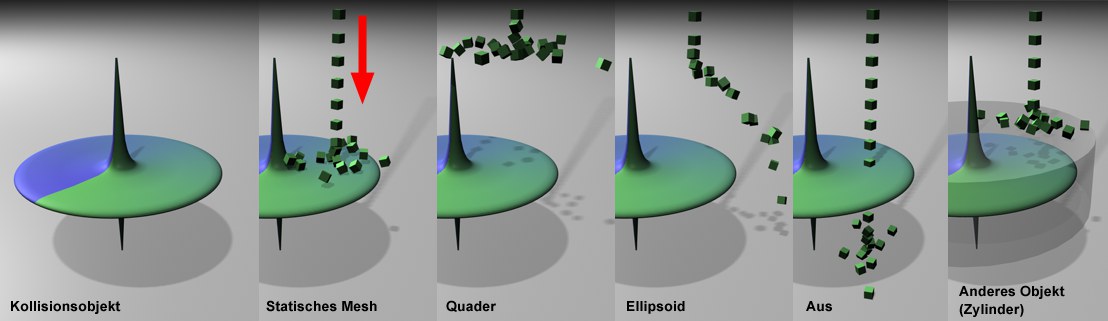 Mit links abgebildetetem Kollisionsobjekt kollidieren Klone. Je nach Form prallen diese unterschiedlich ab.
Mit links abgebildetetem Kollisionsobjekt kollidieren Klone. Je nach Form prallen diese unterschiedlich ab.Die Reihenfolge bzgl. Rechengeschwindigkeit ist ungefähr diese (von schnellster zu langsamster): Quader, Elipsoid, Zylinder, Konvexe Hülle, Statisches Mesh, Bewegtes Mesh.
Für die folgenden Modi gilt: Automatisch ist immer gut, Rechenzeiteinsparung ist mit den anderen Modi möglich.
Hierbei werden die unten aufgezählten Modi (und einige mehr; z.B. hat das Boden-Objekt eine eigene Entsprechung) intern automatisch – je nach verwendetem Objekt – vergeben. So werden für einige Grundobjekte wie z.B. bei einem Würfel automatisch der Modus Quader verwendet oder für ein polygonales Objekt Statisches Mesh bzw. Konvexe Hülle. Hier wird also automatisch der für das entsprechende Objekt optimierte Modus verwendet. Wenn Sie Rechenzeit einsparen wollen, versuchen Sie die anderen Modi. Stellen Sie sich eine Menge kleiner, kugelähnlicher Objekte vor. Während Automatisch jetzt Konvexe Hülle verwendet, könnten Sie genauso gut Ellipsoid nehmen, was wesentlich schneller ist und optisch kaum einen Unterschied macht.
Dies ist im Wesentlichen eine Kompatibilitäseinstellung zum Laden alter Szenen (es verwendet bei passenden Objekten Statisches Mesh statt Konvexe Hülle.
Der Kollisionskörper entspricht der Bounding Box, also dem Quader, der dem Objekt in seinen maximalen Ausmaßen in jeder Dimension entspricht.
In das kollidierende Objekt wird ein Ellipsoid (also ein "volumetrisches" Oval) eingepasst, der gerade die Mitten der Bounding Box berührt. Für einen Würfel wäre das beispielsweise eine Kugel, die alle 6 Seiten des Würfels berührt.
Zylinder X-Achse
Zylinder Y-Achse
Zylinder Z-Achse
Diese 3 Einstellungen sind primär für die Kollisionsformen von Rädern gedacht. In der Bounding Box des Tag-Objekts wird ein (internes, optimiertes) Zylinderkollisionsobjekt eingepasst. Sie müssen dann nur noch die passende Achse auswählen. Die Drehachse Ihres modelliertes Rades stellen Sie dann auch als Zylinderdrehachse ein.
Hierbei wird eine Art Gummihaut um das Objekt gelegt. Zurückspringende Einbuchtungen bzw. Aussparungen oder Löcher werden nicht in die Kollisionsberechnung mit aufgenommen.
Dieser Modus ist neben Statisches Mesh der einzige, der tatsächlich die echte, nicht vereinfachte Geometrie des Objekts verwendet. Das Objekt kann sich dabei bewegen, es wird stets komplett auf evtl. Kollisionen überprüft.
Beachten Sie, dass dieser Modus eher langsam ist und auch sonst einige Probleme (z.B. Durchdringungen, Objekte "verkleben” etc.) mit sich bringt. In solchen Fällen ist die Option Anderes Objekt mit einem simplen Ersatzobjekt anzuraten.
Das ist neben Bewegtes Mesh die rechenzeitaufwendigste Modus, da hier tatsächlich die echte, nicht vereinfachte Geometrie verwendet wird.
Alle von den Dynamics aktiv beeinflussten Objekten ( ) werden dann allerdings als unbewegte, reine Kollisionsobjekte angesehen. Statisches Mesh ist da durchaus wörtlich zu nehmen.
) werden dann allerdings als unbewegte, reine Kollisionsobjekte angesehen. Statisches Mesh ist da durchaus wörtlich zu nehmen.
Dieser Modus ist auch zu verwenden, wenn z.B. eine Kugel als hohl angesehen werden soll und im Inneren dynamische Objekte herumkullern sollen.
Der Körper kollidiert gar nicht. Alle dynamischen Objekte fallen durch ihn hindurch.
Mittels dieser Option können Sie ein Ersatzkollisionsobjekt angeben. Stellen Sie sich ein hoch aufgelöstes, aus Millionen Polygonen bestehendes Objekt vor, das evtl. nur an einer bestimmten Stelle kollidieren soll. Der Rechenaufwand dafür ist ziemlich hoch. Wenn Sie stattdessen ein anderes Objekt verwenden, das nur grob der Originalform entspricht, aber vielleicht nur aus ein paar hundert Polygonen besteht, geht die Berechnung natürlich viel schneller von der Hand. Bei Auswahl dieser Option wird ein Verknüpfungsfeld eingeblendet, welches das Ersatzobjekt aufnimmt. Beachten Sie, dass die Position dieses Objekts egal ist, es wird bei der Berechnung deckungsgleich (bzgl. des Ursprungs) mit dem Originalobjekt gemacht.
Die (interne) Kollisionsform dieses Ersatzobjekts gehorcht wiederum den oben beschriebenen Regeln (hat dieses kein Dynamics Body Tag: Form Automatisch). Sie können dem Ersatzobjekt ebenfalls ein Dynamics Body Tag spendieren, um die Form genauer zu spezifizieren. Die Option Aktiviert kann dabei ruhig ausgeschaltet werden.
Ziehen Sie hier das Ersatzkollisionsobjekt hinein (s. vorhergehenden Parameter).
Mittels dieses Parameters kann die (Kollisions-)Objektgröße vergrößert (positive Werte) bzw. verkleinert (negative Werte) werden (im Gegensatz zum nächsten Parameter Toleranz bleibt dabei die Objektform erhalten). Der Parameter dient nur für spezielle Effekte. Denken Sie an eine Mauer, deren Ziegelsteine mit einem sichtbaren Abstand in der Luft zu schweben scheinen und die Konstruktion verhält sich trotzdem mauergerecht. Gleiches könnte auch bei sichtbaren Durchdringungen angebracht sein, wenn Sie nicht unbedingt die rechenzeitverlängernden Vergrößerung von Zwischenschritte in Betracht ziehen wollen.
Hieran brauchen Sie normalerweise nichts verändern. Dieser Parameter entspricht der szenenweiten Einstellung Kollisionstoleranz, nur dass Sie diese hier auf Objektebene einstellen können.
Der Wert kann auch auf 0 gesetzt werden, was dann aber neben der Rechenzeit auch die Stabilität reduziert. Zu kleine Toleranzwerte können dann aber auch zu Durchdringungen führen.
Höhere Werte sind allgemein angebracht, wenn es zu fehlerhaften Berechnungen und falschen Kollisionen kommt. Allerdings kann es hier dann auch helfen, die Zwischenschritte zu erhöhen.
Allgemein gesagt, werden bei den Grundobjekten dazu Kanten gerundet.
Die Toleranz dient im Gegensatz zur Größendifferenz ausschließlich zur Optimierung der Stabilität der Dynamics.
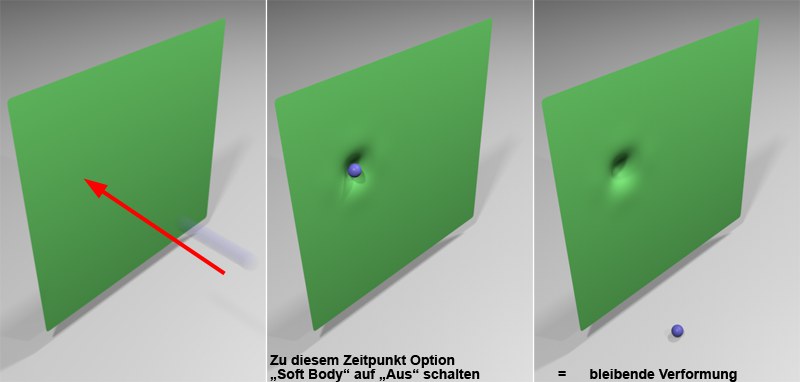 Die aktivierte Option kann aus dem Soft Body einen verformten Rigid Body machen. Soft Bodies neigen ansonsten dazu, Dellen wieder auszugleichen.
Die aktivierte Option kann aus dem Soft Body einen verformten Rigid Body machen. Soft Bodies neigen ansonsten dazu, Dellen wieder auszugleichen.Diese Option eignet sich beispielsweise, um bleibende Dellen in einem harten, zähen Objekt (eigentlich das Gegenteil eines Soft Bodies) zu erzeugen.
Die Option macht prinzipiell nichts anderes, als bei einem sich verformenden Soft Body die aktuelle Form einzufrieren, wenn Sie Soft Body von
Wenn 2 Objekte kollidieren, ist dies ein Maß für die Kraft, mit der die Objekte voneinander abprallen. Werte nahe bei 0 sorgen für einen unelastischen Stoß, etwa wie wenn 2 Knetgummikugeln zusammenprallen. Werte nahe bei 100% sorgen für ein ziemlich federndes Verhalten, wie z.B. 2 kollidierende Billardkugeln.
Physikalisch korrekte Werte bewegen sich zwischen 0 und 100%.
Beachten Sie, dass es immer zwei dieser Werte für die beiden kollidierenden Objekte gibt. So hat ja beispielsweise ein Boden auch eine Elastizität, d.h. wenn einer von beiden Kollisionspartnern die Elastizität 0 hat, kann das andere Objekt selbst mit einem Wert von 1000% nicht abprallen.
Wenn Sie viele miteinander kollidierende Objekte haben, sorgen kleinere Werte dafür, dass das gesamte System schneller zur Ruhe kommt.
Beachten Sie, dass dieser Wert für Kollisionen von Rigid Bodies gilt. Bei Soft Bodies hat er einen solch geringen Einfluss, dass er dort normalerweise vernachlässigt werden kann.
In der Physik gibt es normalerweise 3 Reibungsarten. Es sind dies
- Haftreibung
- Gleitreibung
- Rollreibung
Haft- und Gleitreibung werden in Cinema 4D in einem einzigen Parameter, nämlich Reibung zusammengefasst. Die Reibung ist ein Maß für die bremsende Kraft, die ein Objekt erfährt, wenn es über ein anderes rutscht bzw. die Kraft, bis ein ruhendes Objekt anfängt zu rutschen. Beide Reibungen sind also immer gleich gross. Beachten Sie auch hier, dass immer 2 Objekte als Kollisionspartner beteiligt sind, die beide unterschiedliche Reibungswerte definiert haben können. Hat ein Objekt den Wert 0% kann die Reibung auch durch hohe Werte des anderen Objekts nicht vergrößert werden.
Allgemein gilt, je höher der Wert (kann auch wesentlich größer als 100% sein) ist, desto weniger rutscht das Objekt und desto mehr rollt bzw. überschlägt es sich.
Wenn Sie viele miteinander kollidierende Objekte haben, sorgen größere Werte dafür, dass das gesamte System schneller zur Ruhe kommt.
Cinema 4D verzichtet im Übrigen auf die Rollreibung, die aber durch Rotationsdämpfung simuliert werden kann.
Kollisionsvorgang. Stellen Sie sich vor, ein Haufen gleichartiger Objekte fällt zu Boden und jeder verhält sich exakt gleich in seinen Bewegungen. Das sieht einfach unrealistisch aus.
Je größer der Wert hier, desto unterschiedlicher kollidieren die Objekte.