![]() Konnektor
Konnektor
Konnektor
Konnektoren schränken die Bewegungen/Drehungen von Rigid und Soft Bodies ein. Konnektoren können also folgerichtig nur auf Objekte mit Dynamics Body Tag wirken!
Ohne Konnektoren würden Rigid/Soft Bodies ansonsten nur auf Kräfte und Kollisionen reagieren. Es wäre damit beispielsweise sehr aufwendig, ein simples Türscharnier zu realisieren. Mit einem Konnektor (Typ Scharnier) ist das problemlos möglich.
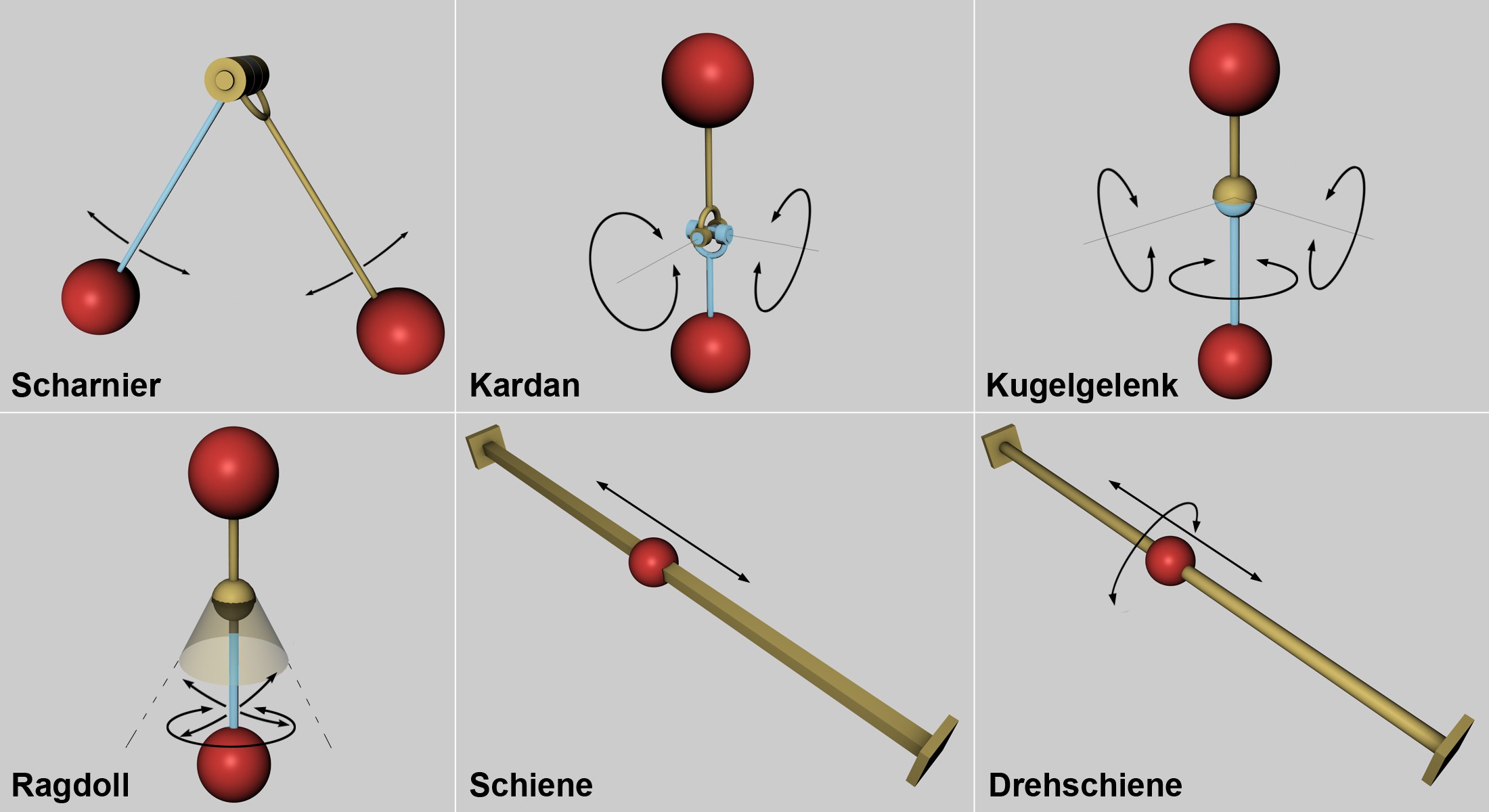 Einige der Konnektoren. Die Pfeile zeigen die möglichen Bewegungs- bzw. Rotationsrichtungen an. Die nicht abgebildeten Fläche, Quader und Radfederung sind im Grunde Kombinationen der genannten.
Einige der Konnektoren. Die Pfeile zeigen die möglichen Bewegungs- bzw. Rotationsrichtungen an. Die nicht abgebildeten Fläche, Quader und Radfederung sind im Grunde Kombinationen der genannten.Konnektoren werden in der Ansicht funktionsgerecht mit einer Vorschau eingeblendet, sodass man auf einen Blick die Beschränkungen auch visuell erfassen kann.
Nicht funktionierende Konnektoren (die z.B. mit ausgestellter Option Dynamisch oder mit nicht wenigstens einem Objekt mit Dynamics Body Tag verbunden sind oder die beteiligten Objekte wurden noch nicht ausgelöst) werden dabei rot angezeigt.
Vorgehensweise, um einen Konnektor zu erzeugen
- Rufen Sie einen Konnektor (
) auf. - Schieben bzw. drehen Sie den Konnektor in der Ansicht an die richtige Position (dort, wo sich ein Scharnier befindet oder parallel zur Achse eines Schiebereglers) .
- Verknüpfen Sie in den Konnektoreinstellungen (Tab "Objekt") die mit den Dynamic Body Tag versehenen Objekte mittels der Parameter Objekt A und Objekt B.
Die Konnektor-Position und -Ausrichtung ist wichtig! Diese Einstellungen geben nämlich die Bewegungs- und Drehachsen vor. Wenn Sie sich obige Abbildung betrachten, sind beispielsweise beim Scharnier die möglichen Drehrichtungen der Kugeln durch die Gelenkposition vorgegeben, genauso wie die Lage des Schienen- Konnektors definiert, in welche Richtung sich die Kugel verschieben kann.
Das Scharnier wird meistens auf einer Drehachse positioniert. Betrachten Sie sich folgende simple Szene, 2 Zylinder, 2 Würfel, jeweils mit einem Dynamics Body Tag versehen:
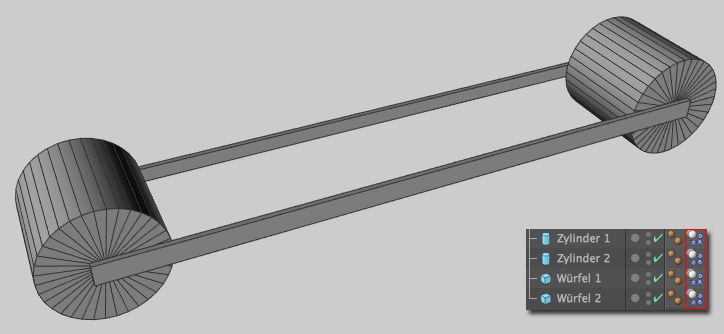 Aus diesen 4 Grundobjekten soll ein funktionsfähiges Gefährt werden.
Aus diesen 4 Grundobjekten soll ein funktionsfähiges Gefährt werden.Ohne Konnektoren fallen diese 4 Bauteile einfach runter, ohne gross miteinander (abgesehen von eventuellen Kollisionen) zu interagieren. Um aus den Teilen ein funktionsfähiges Gefährt zu machen, brauchen Sie 4 Konnektoren vom Typ Scharnier, die die 2 Würfel jeweils an die Drehachsen der Zylinder fesselt. Erzeugen Sie also 4 Konnektoren. Der Trick dabei ist, dass 2 Konnektoren jeweils in der ersten Zylinder-Drehachse liegen und die anderen beiden Konnektoren in der zweiten Zylinder-Drehachse (die Funktion Übernehmen wird Ihnen dabei gute Dienste leisten). Dabei ist es unerheblich, wo die Konnektoren auf der Drehachse liegen. Diese können axial beliebig verschoben werden, ohne dass die Funktionalität gestört würde. Natürlich ist es sinnvoller, sie an ihre "reale" Position zu verschieben, in diesem Falle wären das die Lager, also dort, wo in der Realität die "Schnittstellen" zwischen drehenden Objekten liegen. Danach müssen Sie in den Konnektor-Einstellungen (Tab "Objekt") noch jeweils sinnvoll (also an den Drehpunkten die zugehörigen Objekte) Zylinder und Würfel verknüpfen:
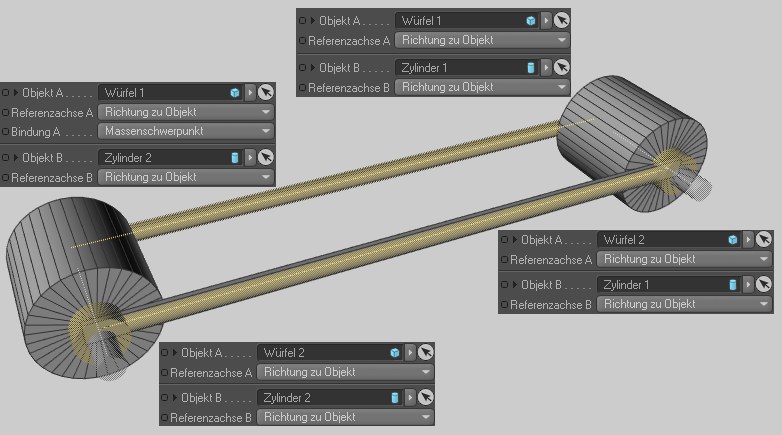
Und damit haben Sie tatsächlich schon ein funktionsfähiges Gefährt geschaffen, was selbstständig beispielsweise auf einer schiefen Ebene rollen kann. Die 4 Objekte bilden einen festen Verbund mit drehbaren Zylindern. Denkbar wäre jetzt noch der Antrieb eines Zylinders mittels eines Motors, womit das Gefährt sogar bergauf fahren könnte.
2 Konnektoren können auch kombiniert werden, d.h. beispielsweise kann ein Konnektor vom Typ Schiene an ein Scharnier- Konnektor geknüpft werden, wie bei diesem Beispiel:
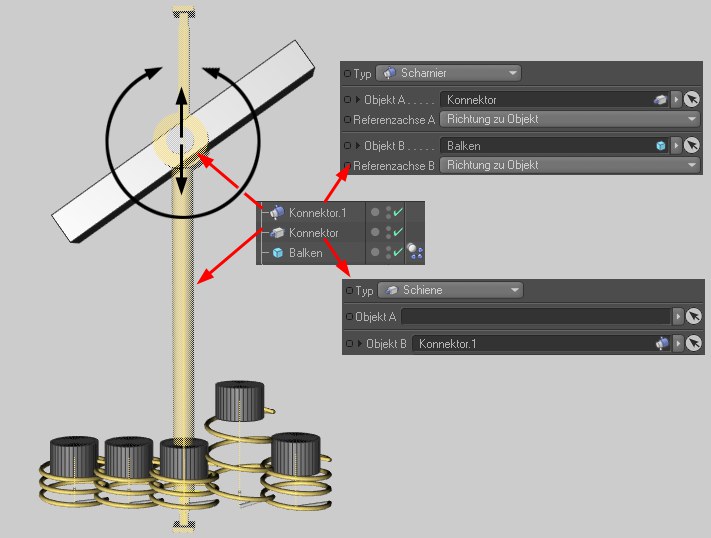 Ein Scharnier-Konnektor wird mit einem Schienen- Konnektor verknüpft.
Ein Scharnier-Konnektor wird mit einem Schienen- Konnektor verknüpft.Die unten abgebildeten Federn, die zufällig ihre Ruhelänge ändern, werfen den Balken immer wieder nach oben. Damit dieser wieder auf die Federn fällt, sorgt "Konnektor" für eine ausschliesslich senkrechte Bewegung. Damit sich der Balken auf dieser vertikalen Auf- und Ab-Bewegung auch noch drehen kann, ist dieser mittels des Scharnier- Konnektors " Konnektor.1" an den ersten Konnektor geknüpft. Fertig ist das Perpetuum Mobile mit Kaminfeuereffekt.
Was leider aus mathematischen Gründen ohne weiteres nicht funktioniert, ist das direkte Verknüpfen von 2 linearen (Schiene) oder 2 Winkel- Konnektoren (Scharnier, Kardan, Ragdoll, Kugelscharnier).
Vermeiden Sie im Allgemeinen aber das Verknüpfen zu vieler Konnektoren, da dann der Aufbau schnell sehr unübersichtlich wird. Normalerweise sind in Szenen ja auch alle bewegenden Teile ausmodelliert, dort reichen meist einzelne Konnektoren aus, um die Funktionalität zu gewährleisten. Denken Sie an ein Autorad. Das an der Achse befestigte Rad dreht sich um dieselbe. Ein simpler Scharnier- Konnektor stellt hier die benötigte Funktionalität zur Verfügung.
Vervielfältigung von mit Konnektoren verbunden Objekten
Es ist möglich, ganze Dynamics-Systeme mitsamt Konnektoren, Federn, Motoren und den in diesen Elementen verknüpften Objekten funktionsfähig zu duplizieren. Dazu sollten Sie alle Elemente unter ein gemeinsames Null-Objekt packen und dieses dem Generator unterorden.
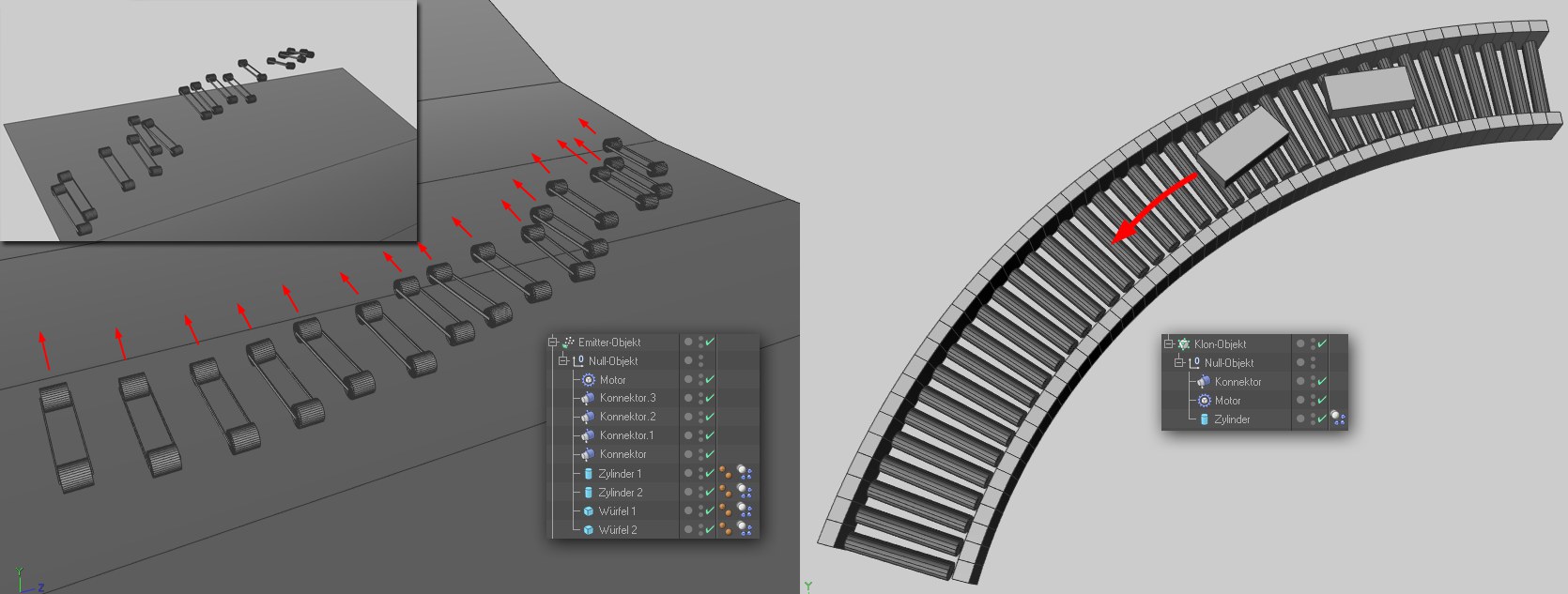
Links in der Abbildung wurde das hier erzeugte Gefährt mit einem Motor ausgestattet und dann das ganze Konstrukt in einen Emitter geworfen. Der Emitter setzt die Fahrzeuge frei, die dann selbstständig durch die Gegend kurven. Rechterhand sehen Sie einen simplen, ebenfalls durch einen Motor angetriebenen Zylinder, der mittels eines Klon-Objekts bogenförmig geklont wurde. Das Ganze ergibt ein funktionierendes Rollenförderband.
Denken Sie jeweils daran, von den Dynamics unbeeinflusste Kollisionsobjekte (wie in obigem Beispiel links die Ebene und rechts die begrenzenden Schienen) mit den passenden Formen zu versehen (meist Form
Wenn Sie das Gefühl haben, die Konnektoren gehen nicht 100% ihrer bestimmungsgemäßen Arbeit nach, d.h. sie geben nach oder federn zu viel, dann hilft es meist, sich der Präzision der Dynamics-Berechnung zu widmen (primär vertreten durch die 3 Parameter Zwischenschritte, Maximale Iterationen pro Schritt und Fehlerschwellwert).
Ein anderer Grund können extrem große Massenunterschiede der Objekte (dazu kommt es auch auch, wenn Sie Form im Tab Kollision des "Dynamics Body Tag" auf Aus setzen!) sein. Das mögen Physik-Simulationen im Allgemeinen nicht so besonders.