스테레오스코픽
스테레오스코픽 카메라 설정은 시점이 약간 옵셋 되는 둘 이상의 이미지 생성과 관련된 모든 속성을 정의합니다. 스테레오스코피에 관한 자세한 정보는 여기를 참조하시기 바랍니다.
VR 스테레오스코피에서 구형 카메라에 대한 자세한 정보는 여기를 참조하세요.
이것은 스테레오스코피가 없는 일반적인 카메라 모드입니다.
이 모드를 이용하여 일반 스테레오스코픽 이미지를 렌더링 할 수 있습니다. 이중 카메라가 가정되며 각 카메라는 정의된 미간(eye separation) 값에 따라 좌우로 할당될 것입니다.
정의된 파라미터에 의해, 두 카메라는 카메라 오브젝트의 X 축에 따라 위치하게 됩니다:
- 왼쪽: 왼쪽 카메라는 0으로 설정됩니다, 오른쪽 카메라는 + 눈 사이의 거리로 설정됩니다.
- 오른쪽: 왼쪽 카메라는 -로 설정되고두 눈의 거리,오른쪽 카메라는 0으로 설정됩니다.
이 값은 좌우안 사이의 거리를 정의합니다. 기본값인 6.5cm는 인간의 눈 사이 평균 간격을 반영한 것입니다. 일반적으로, 이 값은 가능한 작아야 합니다. 값이 클수록 넓은 시야각을 보장하지만 뷰어가 씬을 바라보는데 있어 보다 불편함을 느끼게 될 것입니다. 예외: 풍경과 같은 씬은 카메라로부터 멀리 떨어진 것으로 묘사됩니다.
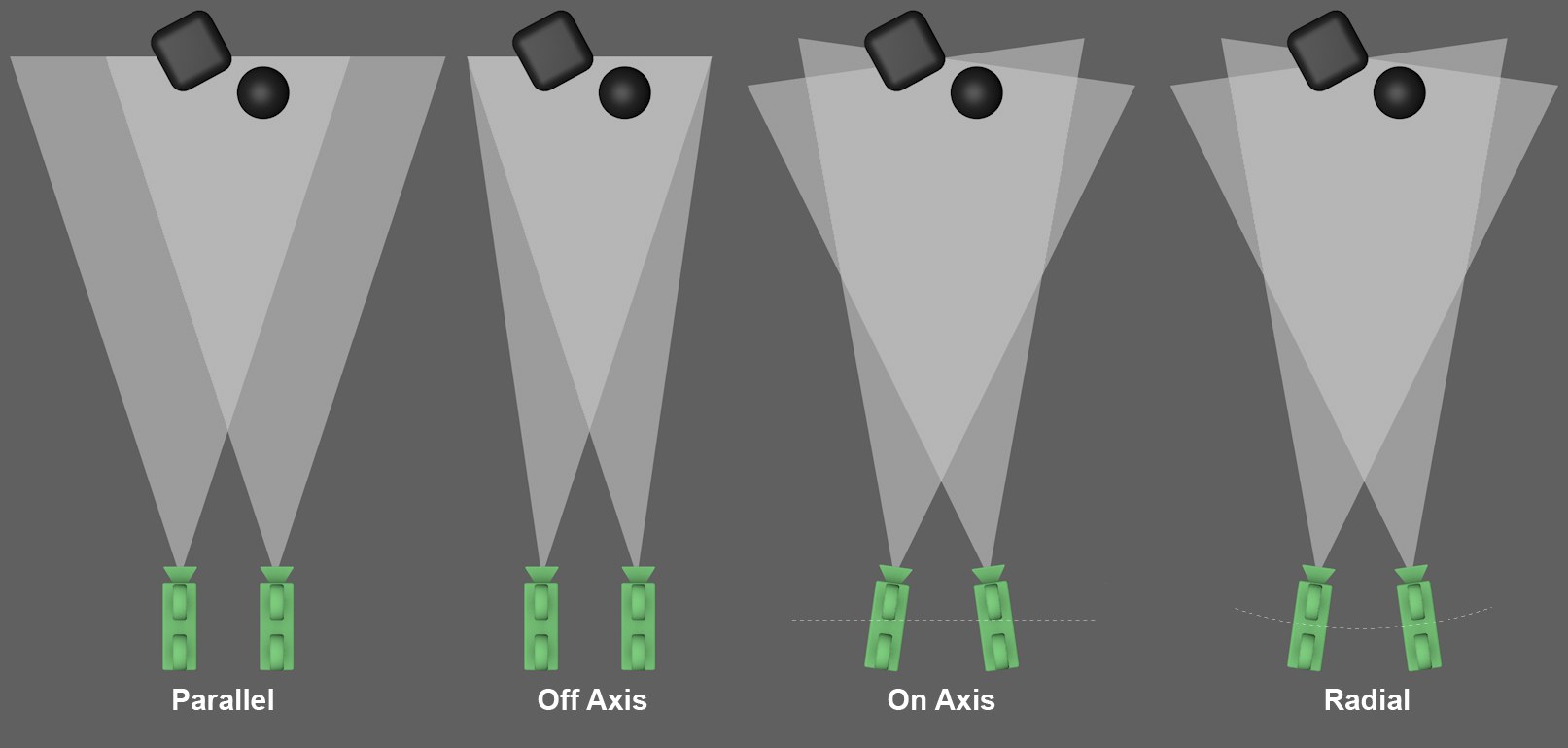 배치에 따라, 두 개 (또는 둘 이상의) 카메라가 서로 다르게 회전할 것입니다.
배치에 따라, 두 개 (또는 둘 이상의) 카메라가 서로 다르게 회전할 것입니다.다양한 옵션이 가능함에도 불구하고, 대부분은 호환성을 이유로 존재합니다. 스테레오스코픽 이중 이미지를 위해 여러분은 항상 배치를 축 해제로 설정해야 합니다 (상황에 따라 예외는 있습니다). 위의 이미지의 각 예제는 이중 카메라만을 사용한 것입니다. 렌더 설정의 스테레오스코픽 설정에서, 이미지들은 채널별 렌더링으로 설정이 가능합니다. 가령 씬이 어떤 개수의 카메라 뷰에 상관없이 렌더링이 가능합니다. 카메라의 배치는 위에서 확인하실 수 있습니다.
이것은 가장 단순한 스테레오스코픽 카메라 배치입니다. 두 카메라가 서로 평행하게 배치됩니다 (이미지 축 또한 평행합니다). 이러한 유형의 배치를 갖는 스테레오스코픽 이미지는 오브젝트가 프로젝션 평면의 앞에 있는 것으로 묘사합니다. 따라서 널 평면은 Zero Parallax 값을 수정하여 움직일 수 없습니다 (Zero Parallax를 참고하시기 바랍니다). 이것은 다음 세 가지 모드와 대조됩니다.
기본적으로 평행과 동일한 카메라 배치이지만 옵셋(X 필름 옵셋과 유사합니다)을 가지고 있습니다. 즉, 이미지 축이 더 이상 평행하지 않고 교차함을 의미합니다. 제로 패럴랙스는 교차되는 포인트에 위치합니다 (다음 설정인 Zero Parallax 참조). 오브젝트는 프로젝션 평면의 앞 아니면 뒤에 위치하는 것으로 표현될 수 있습니다 (가령 모니터 안 또는 앞).
이 모드는 스테레오스코픽 이중 영상을 위해 추천되는 모드인데, 가장 넓은 응용 범위로 최상의 결과를 내기 때문입니다.
이 모드가 선택되면, 두 대의 카메라가 회전하여 Z축이 제로 패럴랙스와 교차하게 됩니다. 이것은 인간의 눈이 작동하는 방식을 근사적으로 반영하지만 수직 패럴랙스의 결과를 가져올 수 있기 때문에 스테레오스코픽 영상을 만드는데 있어서는 권장하지 않습니다. 이 모드는 "토인(toe-in)” 이라고도 불립니다.
이 모드는 두 대의 카메라가 Z축이 아닌 원호(원호의 중심점은 두 대의 카메라의 제로 패럴랙스의 교차점에 위치합니다) 상에 있다는 점을 제외하면 축 상(on axis)와 유사합니다.
(한 대의 카메라가 아닌)좌 우 카메라 모두 뷰포트에 표시하려면 이 옵션을 켜십시오.
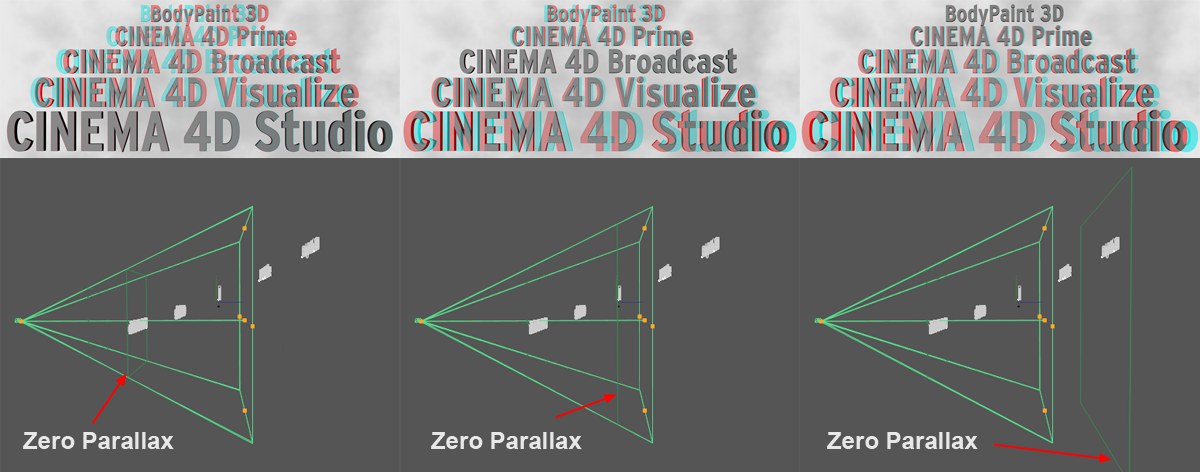
제로 패럴랙스는 카메라의 시야각에 수직하여 위치하며 프로젝션 평면, 가령 모니터 스크린의 깊이를 표현하는 평면, 이 위치하는 가상의 평면입니다. 카메라를 향해 이 평면의 앞에 있는 오브젝트들은 뷰어를 향해 모니터 밖으로 돌출됩니다. 이 평면 뒤에 있는 오브젝트들은 모니터의 "안에” 있습니다.
뷰포트에서 제로 패럴랙스는 중앙의 어두운 녹색 카메라 평면으로 표시됩니다.
XPresso를 통해 제로 패럴랙스를 타겟 거리에 링크하면 핸들을 이용하여 뷰포트에서 인터랙티브하게 제로 패럴랙스를 조절할 수 있습니다.
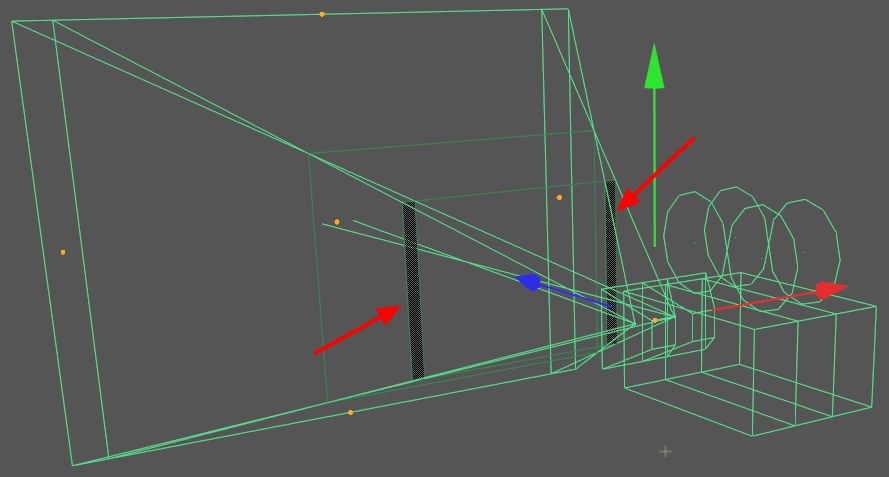
자동 평면
평면 근접 [0..+∞m]
평면 먼거리 [0..+∞m]
안전하게 플레이하려면, 90을 선택하고 카메라를 향하여 이 평면 뒤로 모든 가시 오브젝트들을 위치 시킵니다.
자동 평면은 렌더링에 영향을 주지 않습니다! 이것은 수동으로 조절할 수 있는 비주얼 참조의 역할을 합니다. 만약 테스트 렌더링을 통해 카메라로부터의 거리 이내에 있는 최적 공간 효과를 얻고자 한다면 (예를 들어 카메라에 너무 근접한 오브젝트들 – 반면 제로 패럴랙스는 멀리 떨어져 있음 – 은 육안으로 식별하기 어렵습니다), 이러한 평면들을 적절히 정의하고 제한된 공간 내에 올바르게 뷰포트 내에 오브젝트들을 위치시킬 수 있습니다ㅏ.
70와 90 옵션은 근접 평면에 대해 각각 70과 90의 패럴랙스를 나타냅니다. 이러한 값들은 기술 문서 상 육안이 보통의 노력으로 공간을 인식하는 값들로 표현됩니다. 따라서 오브젝트들은 이 근접 평면 뒤에 있어야 합니다.
최대 패럴랙스 (적색과 시안색 사이의 거리(Anaglyph))를 정의하는 공식도 있습니다:
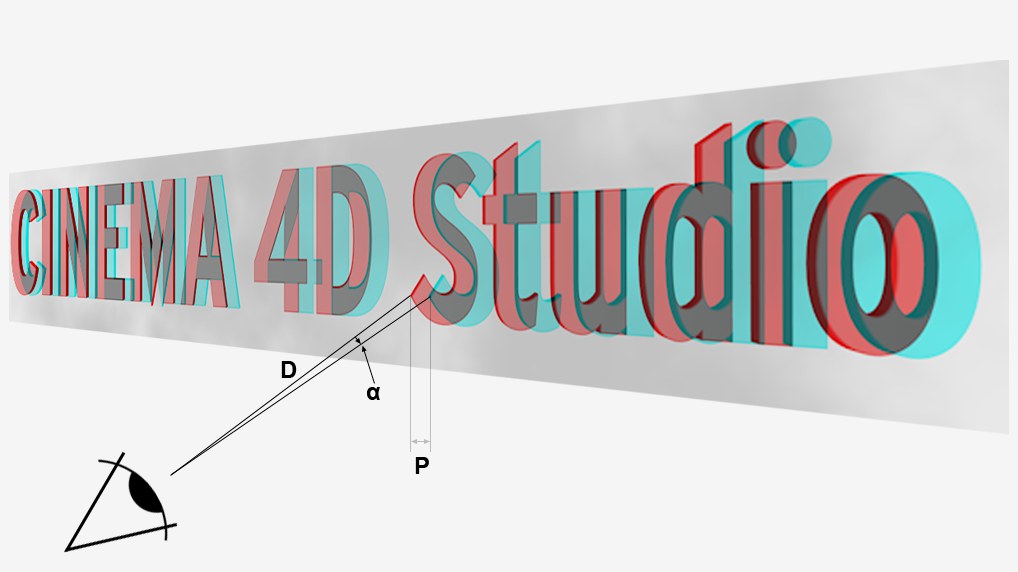
P = tan a * D
여기서 P = 패럴랙스, D = 프로젝션 평면(가령 모니터)으로부터 뷰어까지의 거리, a = 눈이 편안하게 볼 수 있는 2 점 사이의 각도 (이것은 최대 1.5° 또는 이보다 약간 작은 값이 되어야 합니다).
눈과 모니터 간의 평균 거리인 50 cm에 대해 평균 참조 값은 13 mm의 결과를 나타냅니다.
(각 카메라에서 보여질 수 있는) 특정 영역 표시 사용 또는 해제. 전체 카메라 보기 옵션 또한 사용되어져야 합니다.
중요 범위(각 카메라로 보이는 범위)의 디스플레이를 활성화 또는 비활성화 합니다. 전체 카메라 보기 옵션이 활성화 되어야 합니다.
구형 카메라의 입체 사진을 360°로 보려는 경우, 특수한 설정을 사용할 수 있습니다. 왼쪽 및 오른쪽 눈 보기는 단일 이미지(왼쪽=위쪽, 오른쪽=아래)에 결합니다.
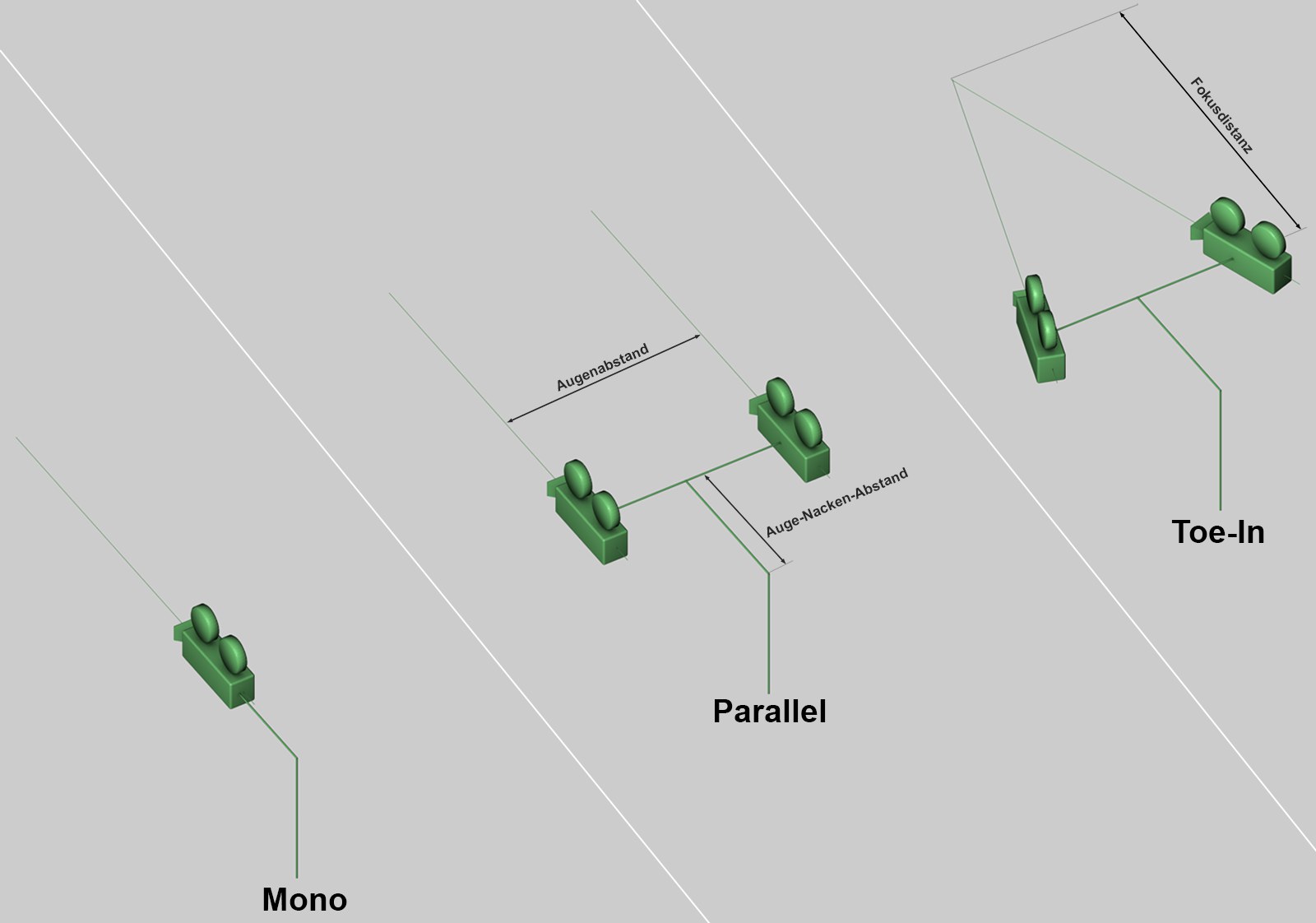 카메라 축이 있는 다양한 스테레오 모드(카메라는 파노라마 렌더링을 위해 내부적으로 회전함).
카메라 축이 있는 다양한 스테레오 모드(카메라는 파노라마 렌더링을 위해 내부적으로 회전함).다음 옵션을 사용할 수 있습니다:
- 모노: 입체적인 이미지가 렌더링되지 않습니다.
- 평행: 두 카메라가 평행 축으로 배열됩니다.
- Toe-In: 두 카메라의 축이 교차합니다. 교차점은 초점 거리를 사용하여 정의할 수 있습니다.
두 스테레오 모드 간의 주된 차이점은 널 시차의 정의, 즉 시차가 생성되지 않는 카메라로부터의 거리에 있습니다. 이 공간 깊이는 뷰포트에서 볼 수 있습니다. Toe-In을 선택하면 초점 거리설정을 사용하여 널 시차가 정의되고 이후 수정할 수 없습니다.
평행이 선택되면, 널 시차는 무한하며, (왼쪽 및 오른쪽으로 이동함으로써) 후속적으로 수정될 수 있습니다.
여기서 스테레오 이미지를 배열하는 방법 또는 어느 스테레오 이미지를 혼자 렌더링해야 하는지 정의할 수 있습니다.
이 값은 두 카메라/눈 사이의 거리를 정의합니다. 6.5cm의 기본거리는 인간의 눈 사이의 평균 거리를 나타냅니다.
렌더링되는 타겟 모델(이 시스템은 Oculus Rift 타겟팅 시스템에 따라 작동함)에 따라 목 "Atlas”(또는 C1)에서 눈까지의 수평 거리를 정의할 수 있습니다(위 그림 참조). Atlas는 (앞으로 누워있는) 눈을 포함하여 머리가 회전하는 회전 조인트입니다. 따라서 목간 거리를 0으로 설정하면 카메라의 회전 지점이 더 이상 두 카메라의 중앙에 있지 않게 됩니다.
스테레오 모드가 Toe-In으로 설정된 경우, 이 설정을 사용하여 널 시차가 어디에 있어야 하는지 정의할 수 있습니다. 카메라의 방향에서 점과 면 앞쪽에 있는 물체는 모니터에서 뷰어 쪽으로 튀어나오게 됩니다. 이 지점 뒤에 있는 물체는 모니터에 더 "가라앉을” 것입니다.
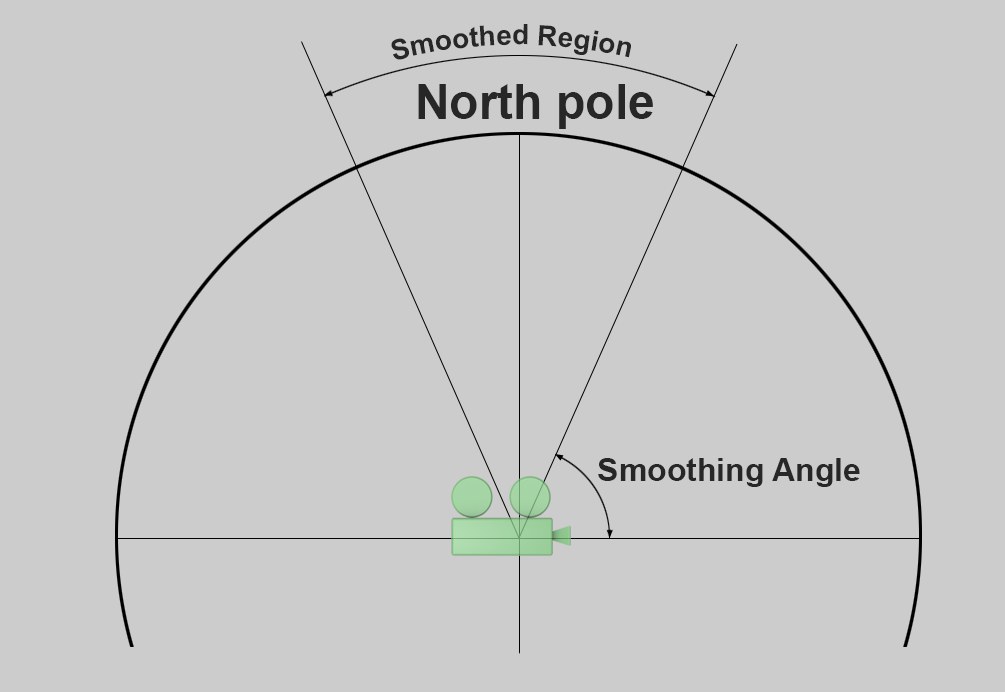
기술적인 이유로, 스테레오스코피는 폴 부분이 올바르게 렌더링 할 수 없습니다. 원하지 않는 아티팩트를 방지하기 위해, 이 영역에서 스테레오 효과가 점차 희미해질 수 있습니다. 대부분의 경우 시각적으로 중요한 요소는 대부분 카메라 위치 주변(수평 위 또는 아래가 아닌)에서 수평으로 발생하기 때문에 문제없이 수행할 수 있습니다.
스무싱은 상단 하단 폴에 대해 별도로 정의할 수 있습니다. 스무싱이 이뤄지는 영역에서는 최대 가능한 스무싱과 동일해질 때까지 뷰가 왼쪽 및 오른쪽 카메라와 동일하게 조정됩니다. 스무싱 유형은 아래에 설명되어 있습니다.
위 스무싱 각도 [-90..0°]
위 폴 Exp [0..10]
아래 스무싱 각도 [0..90°]
아래 폴 Exp [0..10]
시작부터 폴까지 얼마나 부드럽게 할 것인지는 선형 옵션(선형 증가 강도, 갑자기 전개) 또는 지수(기하 급수적으로 증가하는 강도, 즉 점진적 배치)에서 정의된 스무싱 각도 정의를 사용합니다. 위/아래 폴 Exp 설정은 지수 옵션에 영향을 줄 수 있습니다.