오브젝트 속성
이것은 메인 C모션 탭이며, 사용하고자 하는 타입의 걷기, 속도 및 애니메이션 할 오브젝트와 이들의 특성을 정의합니다.
이 옵션은 생성하고자 하는 타입의 걷기 사이클을 결정합니다.
생성된 사이클은 제자리에서 수행됩니다. 오브젝트들은 앞으로 이동하지 않습니다. 이것은 기본 모드이며 화면에서 사라지지 않고 모든 애니메이션 설정과 캐릭터의 움직임을 미리보기하는데 이상적입니다.
캐릭터는 직선으로 연속적으로 걸어갑니다. (또는 기본 탭에서 프레임 범위 동안 정의할 수 있습니다)
생성된 걷기 사이클은 특정 스플라인 오브젝트의 경로를 따릅니다.
걷기의 애니메이션 된 보폭과 속도를 보간하는 방법을 정의합니다.
이 모드는 주어진 프레임에 대해 동일한 결과를 계산하며, 이는 타임라인을 스크럽할 수 있으며 동일한 프레임으로 돌아가게 되면 캐릭터의 상태는 항상 유사함을 의미합니다. 이 모드는 (시간에 따라 느려지거나 빨라지는 걷기 등) 적절하게 애니메이션 되는 것이 불가능합니다.
이것은 걷기가 시간에 따라 속도나 보폭 길이를 변경할 때 사용하는 모드입니다.
걷기 속도 및 보폭 길이의 변화로 인한 스텝의 변화를 바탕으로 모션을 게산합니다. 타임라인을 스크럽하면 마지막으로 계산된 스텝을 기반으로 움직임의 결과에 영향을 줍니다. 그래서, 이 모드를 사용시 타임라인을 스크럽할 경우 주어진 프레임에 동일한 결과를 얻기 어렵습니다.
이 옵션은 보폭 길이를 얻는데 사용됩니다. 각 스텝의 길이는 C모션에 의해 생성됩니다.
각 루프 사이클의 길이를 정의합니다. 시간이 짧을 수록 빠른 애니메이션을 생성합니다.
C모션 오브젝트 자체의 방향 재설정이나 애니메이션할 필요없이 걷기 사이클에 대해 특정 진행 방향을 설정하고 애니메이션 할 수 있습니다. 선 모드에서만 사용 가능합니다.
이 옵션은 전체 걷기 사이클의 수직 모션을 제어합니다. 예를 들어 캐릭터가 언덕을 오르고자 할 경우 좋은 옵션입니다.
스플라인은 캐릭터가 이동하는 경로를 저장할 수 있습니다. 일단 캐릭터가 스플라인의 끝에 도달하면 제자리 걸음을 하게 됩니다.
![]() 오브젝트
오브젝트
캐릭터에 적용할 모든 가능한 액션이 여기에 있습니다. 이것은 기본 모션(위치/회전 등)으로부터 오브젝트 파라미터들이나 유저 데이타와 같은 보다 고급 설정까지 포함합니다.
캐릭터 오브젝트를 사용해서(걷기 추가 버튼) C못견 오브젝트를 생성하면, 템플릿 파일에 사용된 언어(이 경우에는 영어)는 리스트에서 아래에 액션/기간으로 사용됩니다. 헷갈리지 마세요. - 기능은 영향없이 유지됩니다.
위치 액션은 월드 좌표를 바탕으로 하지만, 회전 액션은 각 오브젝트의 로컬 좌표를 바탕으로 합니다. 기본 방향이 다른 오브젝트들과 다르기 때문에 정확한 움직임을 적용시켜야 합니다.
이 액션은 포즈 탭에서 정의된 수직(Y)축을 따라 오브젝트의 위치를 애니메이션합니다.
이 액션은 포즈 탭에서 정의된 가로(X)축을 따라 오브젝트의 위치를 애니메이션합니다.
이 액션은 포즈 탭에서 정의된 진행(Z)축을 따라 오브젝트의 위치를 애니메이션합니다.
이 액션은 로컬 Y축을 따라 오브젝트의 회전을 애니메이션합니다.
이 액션은 로컬 Z축을 따라 오브젝트의 회전을 애니메이션합니다.
이 액션은 오브젝트의 로컬 X축을 따라 로컬회전 액션의 원점을 이동합니다.
이 액션은 로컬 X축을 따라 오브젝트의 회전을 애니메이션합니다.
이 액션은 오브젝트의 로컬 Y축을 따라 로컬회전 액션의 원점을 이동합니다.
이 액션은 스텝을 취하는 속도에 영향을 주며, 보폭 길이를 정의합니다. 불규칙한 스텝 애니메이션에 훌륭한 옵션입니다.
이 액션은 (포즈탭에 있는)편중 모드가 웨이트로 설정되어 있을 때 타겟이 허브에 갖는 당김의 양을 정의합니다. 이 액션은 스텝 타겟에 대해 사용됩니다.
이 액션은 모션 소스로 베이크된 애니메이션을 이용하여 베이크된 애니메이션이 붙은 오브젝트의 모션을 구동합니다. 원하는 모션 소스를 모션링크로 드래그합니다.
C모션에 의해 구동되는 오브젝트를 모션 클립으로 변환하고자 할 경우, 변환시 모션클립 생성 대화상자에서 베이크 익스프레션 옵션이 활성화되어 있어야 합니다.
이 액션은 스플라인 경로를 이용하여 영향을 받는 오브젝트의 모션을 구동합니다. 예를 들어, 원형 스플라인을 스플라인 링크로 드래그하면 허브나 타겟이 스플라인 경로를 연속적으로 따라가게 됩니다. (즉, 이들은 원 안에서 무한히 움직이게 됩니다) 닫힌 스플라인일때 최상의 결과를 얻을 수 있음을 유념하시기 바랍니다.
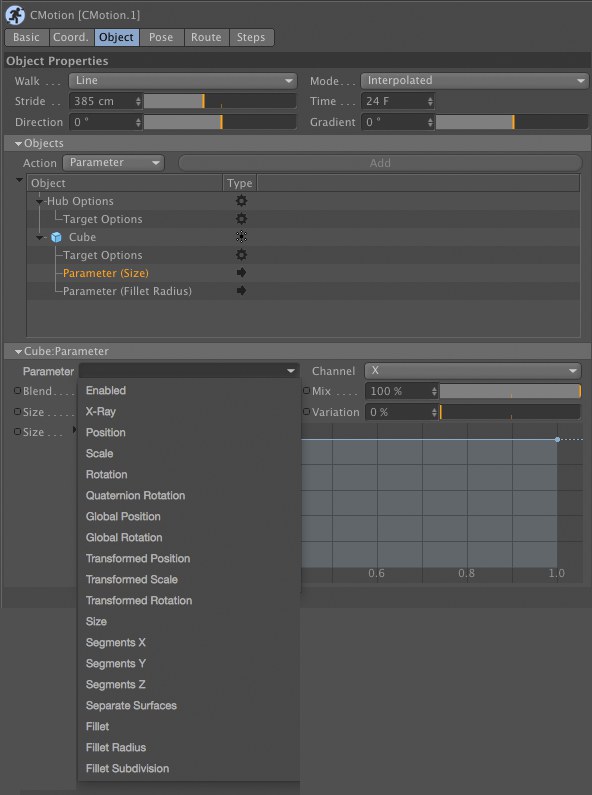
이 액션은 대부분의 오브젝트 파라미터들을 조절할 수 있습니다(실수, 정수, 벡터, 부울(0.5보다 큰 값=활성화됨)). 예를 들어 큐브 오브젝트의 사이즈와 필렛 반경 파라미터를 구동할 수 있습니다. 오브젝트가 유저 데이터를 갖고 있다면 "파라미터” 드롭다운 메뉴에서도 이들을 볼 수 있습니다.
이 액션은 파이썬 스크립트를 추가하여 오브젝트의 움직임을 구동할 수 있도록 합니다.
이 액션은 다른 오브젝트에 의해 이미 사용중인 액션을 참조하기 위해 사용됩니다.
본질적으로, 이것은 참조하고 있는 액션의 인스턴스를 생성하며, 따라서 참조를 편집하면 동시에 두 오브젝트 모두에 영향을 받게 됩니다. 참조에 사용 가능한 액션의 항목은 허브와 허브의 타겟의 이름에 따라 액션의 이름을 표시합니다. 따라서 참조에 대한 액션은 다음과 같이 나타납니다: 액션 <허브 이름/타겟 이름>.
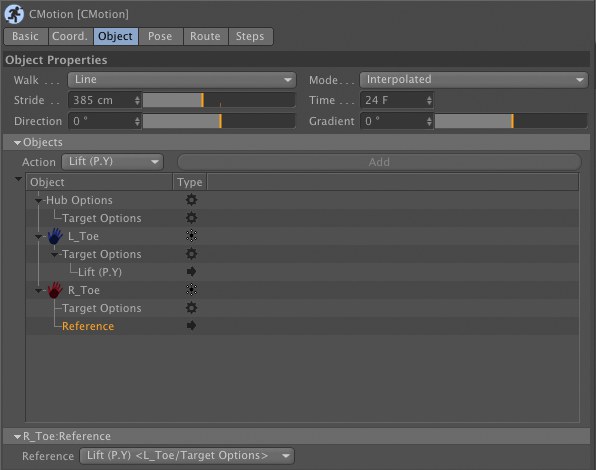 이 예제에서, 왼발로부터 수직이동 액션을 참조하여 오른발 오브젝트로 적용. 왼발 수직이동 파라미터를 변경하면 오른발에도 변화가 생깁니다. (인스턴스 오브젝트와 상당히 유사합니다)
이 예제에서, 왼발로부터 수직이동 액션을 참조하여 오른발 오브젝트로 적용. 왼발 수직이동 파라미터를 변경하면 오른발에도 변화가 생깁니다. (인스턴스 오브젝트와 상당히 유사합니다)데이터 타입은 Float Comma로 설정되어 있어야 합니다. 생성된 원본 파일의 언어가 반영됩니다.(이 경우는 영어), 기능에는 영향을 주지않습니다...
허브나 타겟을 우선 선택한 후, 추가 버튼을 클릭하여 선택된 허브나 타겟에 특정 액션을 붙입니다.
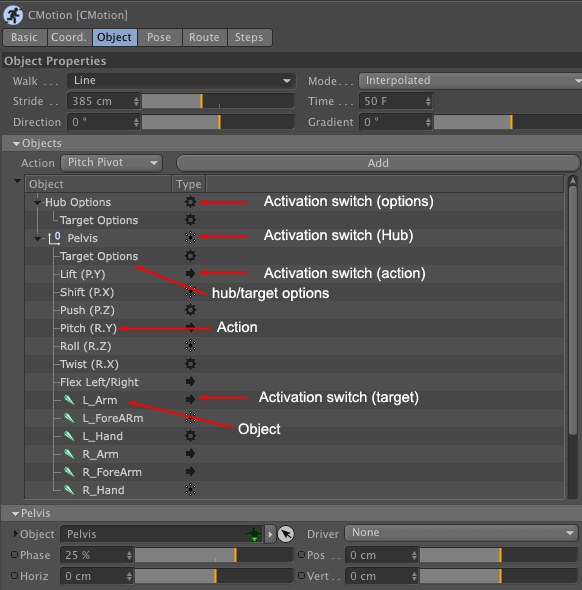
오브젝트 리스트는 C모션 오브젝트에서 사용되는 모든 허브, 타겟, 옵션, 액션을 참조합니다. 오브젝트 매니저로부터 오브젝트들을 드래그하고, 항목 하이라키에서 이들을 재정렬하고, 이름을 변경하고, 액션을 복사하고 붙여넣기 등을 할 수 있습니다.
루트 레벨에 드롭된 오브젝트들은 자동으로 허브 오브젝트가 됩니다. 허브는 메인 바디(대부분의 경우 둔부)를 제어하는 오브젝트입니다. 타겟은 허브 오브젝트의 자식으로 드롭되는 오브젝트입니다. 그들의 모션은 허브 모션에 상대적으로 구동됩니다. 예를 들어, 발가락 타겟들은 이들의 허브 오브젝트인 둔부로부터 신호를 받게 됩니다.
오브젝트 리스트의 최상단에 있는 허브 옵션과 타겟 옵션은 아무런 옵션도 갖지 않습니다. 이들은 액션을 전체적으로 적용하기 위해 사용됩니다. 예를 들어, 수직이동 액션을 글로벌 타겟 옵션에 적용하면 이 수직이동 액션을 갖는 모든 타겟 오브젝트들을 구동하게 됩니다.
 일반적으로, 여러분은 모든 오브젝트들이 메인 허브 오브젝트의 타겟이 되기를 원할 것입니다. 오브젝트들의 모션이 이 허브를 바탕으로 설정될 수 있기 때문입니다.
일반적으로, 여러분은 모든 오브젝트들이 메인 허브 오브젝트의 타겟이 되기를 원할 것입니다. 오브젝트들의 모션이 이 허브를 바탕으로 설정될 수 있기 때문입니다.위의 이미지에서 어떤 방식으로 레이아웃 되는지 확인할 수 있습니다. 활성화 스위치가 있는데, 이는 액션과 옵션을 사용/사용해제 하도록 합니다. 허브나 타겟 아이콘을 클릭하면 이 오브젝트에 적용된 모든 액션과 옵션에 영향을 주게 됩니다. 리스트에서 처음으로 오브젝트를 드래그하면 C모션은 자동으로 PSR 값을 저장하여 초기 포즈를 정의합니다.C모션 오브젝트를 비활성화하여 어느 때든지 초기 포즈로 복귀 가능합니다. (웨이트 수정 또는 리깅을 비틀 필요가 있을 경우 등)
초기 포즈를 수정하고자 할 경우, C모션을 비활성화하고, 오브젝트 위치를 변경하거나 파라미터(예를 들어 유저 데이터)를 변경한 후 C모션 오브젝트를 다시 활성화하여 새 초기 상태를 저장합니다.
오브젝트 리스트에서 우클릭하면 컨텍스트 메뉴를 불러올 수 있습니다.
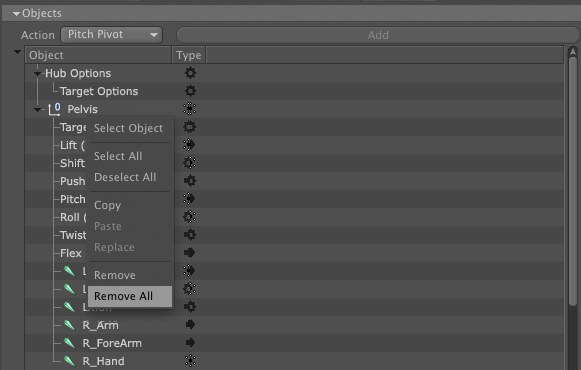
오브젝트 매니저에서 하이라이트된 오브젝트를 선택합니다.
리스트의 모든 허브, 타겟, 옵션, 옵션 등을 선택합니다.
리스트로부터 선택된 모든 허브, 타겟, 옵션 및 액션의 선택을 해제합니다.
선택된 오브젝트, 액션 또는 옵션의 파라미터를 복사합니다.
오브젝트, 액션이나 옵션의 이전에 복사된 파라미터를 붙여넣기 합니다. 이는 해당 파라미터만을 붙여넣기 합니다. 예를 들어, 오브젝트는 리스트에서 복사될 수 없지만 액션을 복사할 수 있습니다. 오브젝트를 붙여넣기 하면 선택된 오브젝트의 파라미터를 교체할 수 있는 반면 액션을 붙여넣기 하면 선택된 오브젝트상의 액션의 복사를 생성합니다. (왜냐하면 동일한 오브젝트 상에 여러 유사한 액션을 가질 수 있기 때문입니다)
복사하는 대신에, 선택된 액션, 오브젝트 또는 옵션의 파라미터들을 완전히 교체합니다. 액션의 경우에만 아주 유용하며 리스트에 복사가 유일하게 가능하기 때문입니다.
리스트에서 선택된 오브젝트나 액션을 제거합니다. 옵션은 제거될 수 없습니다.
리스트로부터 제거가 가능한 것은 모두 제거합니다. (허브와 타겟 옵션은 제외)
- 액션과 오브젝트의 이름을 더블클릭해서 이름을 변경할 수 있습니다. 이름이 변경된 오브젝트들은 오브젝트 매니저에서 변경된 이름을 볼 수 없습니다. 오브젝트 매니저에서 오브젝트 이름을 변경하더라도 오브젝트 리스트에서는 이들의 이름이 변경되지 않음을 유념하시기 바랍니다.
- 리스트에서 오브젝트 및 액션을 드래그하여 순서를 변경할 수 있습니다.
- 오브젝트/액션의 범위를 선택하기 위해
Shift 키를 이용하거나, 선택으로부터 오브젝트/액션을 추가 또는 제거하기 위해Cmd/Ctrl 키를 이용하여 한번에 여러 요소를 선택하여 이들의 모든 파라미터를 표시할 수 있습니다. 이것은 한번에 여러 개의 오브젝트나 액션에 의존하는 모션들을 비틀 수 있는 훌륭한 방법입니다.
이 섹션에서 사용 가능한 옵션들은 오브젝트 리스트로부터 선택하는 오브젝트, 액션 또는 옵션의 유형에 따라 변경됩니다. 섹션의 이름은 현재의 섹션을 반영합니다.
이 파라미터들은 오브젝트 리스트에서 허브 타겟 옵션 항목 선택시 표시됩니다. 각 허브는 다른 허브와는 독립적인 움직임을 정의하는 타겟 옵션 항목을 가집니다.
이 옵션은 스텝이 허브와 관련하여 (비스듬하게) 배치될 곳을 정의합니다.
포즈: 초기 스텝 오브젝트의 PSR값들이 C모션 오브젝트에 추가되는 순간 이 값들을 유지합니다. 원할 경우, 포즈에 상대적으로 이들을 애니메이션 시킵니다.
선: 기본값으로 라인 상의 각 스텝 타겟을 배치합니다.
간격: 기본값으로 라인상에 스텝을 배치하지만 간격 파라미터를 이용하여 수동으로 간격을 설정합니다.
각 스텝간의 간격을 정의합니다. 캐릭터의 발이 벌려진 수평 간격을 제어합니다.
이 파라미터들은 오브젝트 리스트에서 허브나 타겟을 선택 시 표시됩니다. 허브나 타겟은 메인 오브젝트 아이콘에 의해 쉽게 인식됩니다. 허브와 타겟은 두번째 아이콘과는 보다 차별화됩니다.

허브나 타겟이 리스트에 아이콘을 갖지 않을 경우, 이는 오브젝트 매니저로부터 어떤 오브젝트에도 링크되지 않음을 의미합니다. 프리셋을 불러올 때 하이라키가 일치하지 않을 경우 이런 일이 발생합니다.(C모션은 플레이스홀더와 관련 액션을 불러오지만, 어떤 오브젝트에도 영향을 주지 않습니다) 원하는 오브젝트를 다시 링크하면 자동으로 오브젝트에 모든 액션을 적용하거나 필요하지 않을 경우에는 플레이스홀ㄷ와 액션이 제거됩니다.
액션을 적용하고자 하는 오브젝트를 드래그&드롭합니다. 오브젝트 매니저에서 오브젝트 리스트로 오브젝트를 드래그하면 이 링크는 자동으로 채워집니다.
각 오브젝트에 대해 구동 모션의 핸들 방식을 정의합니다.
없음: 허브 또는 타겟은 그대로이며 앞으로 이동하거나 방향을 변경하지 않습니다. (스플라인 경로나 직선을 따르지 않습니다) 이것은 C모션 이외의 다른 방법을 이용하여 허브나 타겟을 애니메이션 할 때 유용합니다.
허브 (타겟에만 해당): 선택된 타겟은 부모 허브의 위치와 방향을 따릅니다. 보통 스텝에 설정된 타겟은 바닥에서 미끄러지기 때문에 옵션의 사용에는 적합하지 않습니다.
경로: 이 옵션을 이용하여 보폭과 시간 파라미터를 바탕으로 각 스텝을 계산합니다. 이 옵션은, 스텝이 자동으로 바닥 위에 배치하지 않고 대신 초기 높이에서 유지된다는 점을 제외하면 스텝 모드와 유사합니다. 손의 IK 컨트롤러를 애니메이션할 때 좋은 방법입니다.
스텝 (타겟에만 해당): 보폭과 시간 파라미터를 바탕으로 스텝 위치를 계산하며 포즈 탭에 정의된대로 오브젝트를 바닥 위에 배치합니다.
이 옵션은 허브나 타겟에 결합된 액션의 타이밍을 옵셋합니다. 이것은 후속 또는 연속적인 동작을 만들어 애니메이션을 정밀화하는 경우 최적의 옵션입니다. (예를 들어 각 스텝 후에 약간 지연되는 머리 회전은 웨이트를 시뮬레이션하는 좋은 방법입니다.)
이 옵션은 허브나 타겟의 초기 포즈와 비교하여 이들의 Z 위치를 이동시킵니다.
이 옵션은 허브나 타겟의 초기 포즈와 비교하여 이들의 X 위치를 이동시킵니다.
이 옵션은 허브나 타겟의 초기 포즈와 비교하여 이들의 Y 위치를 이동시킵니다.
(수직이동 (P.Y), 가로이동 (P.X), 로컬X축회전 (R.X), 로컬Z축회전 (R.Z), 로컬Z축원점이동, 로컬Y축회전 (R.Y), 로컬Y축원점이동, 보폭길이 (P.Z), 편중 웨이트)
이 파라미터들은 오브젝트 리스트에서 액션이 선택될 때 표시됩니다.
액션은 화살표 아이콘으로 쉽게 식별이 가능하며, 항상 오브젝트의 자식으로 위치합니다. (허브 또는 타겟)
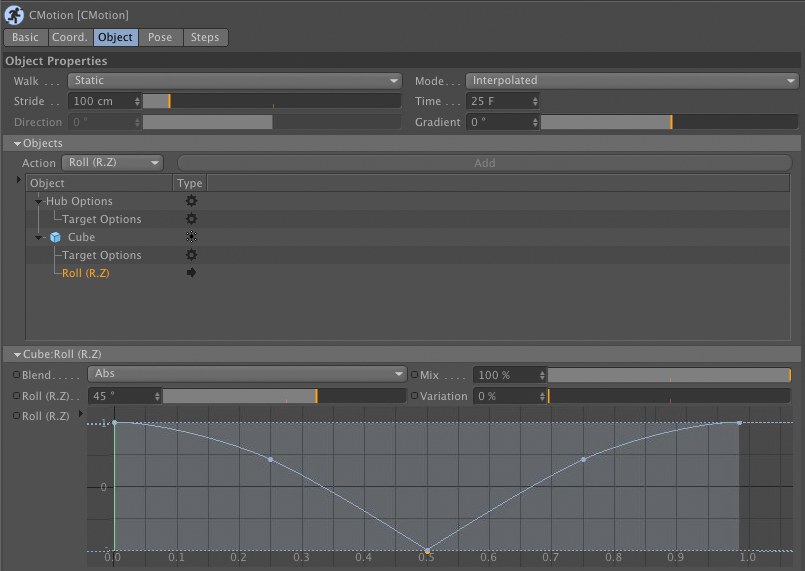 오른쪽 발의 로컬Z축회전 (R.Z) 액션 선택은 이 액션의 파라미터를 표시합니다.
오른쪽 발의 로컬Z축회전 (R.Z) 액션 선택은 이 액션의 파라미터를 표시합니다.이것은 선택된 액션을 사용하기 위한 혼합 모드를 설정합니다. 동일한 타입의 여러 액션을 혼합하고자 할 때 유용한 옵션입니다. 예를 들어, 동일한 오브젝트 상에 하나의 회전 액션 위에 다른 회전 액션을 추가하여 초기 액션 설정을 잃지 않고 모션을 실험하거나 비틀기를 할 수 있습니다.
여러분이 원하는 만큼 액션을 복사하고 혼합할 수 있습니다.
절대적: 액션을 절대적 모드로 설정합니다. 이것은 이 액션에 의해 설정된 모션은 상속되지 않고, 이 액션에 대해 전체 범위의 모션을 얻음을 의미합니다. 두 개의 유사한 액션을 절대적으로 설정한다면, 리스트의 가장 마지막 액션이 고려됩니다. (이것은 앞의 것을 상속하게 됩니다)
더하기: 이 옵션은 이전의 유사 액션에 각 액션의 모션을 추가합니다. 예를 들어, 오브젝트를 10cm 들어올리는 두 액션은 이들의 혼합 모드가 더하기로 설정된다면 사실상 전체 20cm 들어올리게 됩니다.(10+10=20). 첫번째 수직이동 액션을 절대적으로, 두번째 액션을 더하기로 설정한다면 동일한 결과를 얻게 됩니다.
빼기: 이 혼합 모드가 초기 모션에서 빼진다는 것을 제외하면 더하기 모드와 유사합니다.
곱하기: 이 모드가 더하기 및 빼기 모드의 결과를 곱한다는 것을 제외하면 이 두 모드와 유사합니다. 이 모드를 이용하는 액션은 효과를 관찰하기 위해서 다른 액션 아래에 있어야 합니다. (아무것도 곱할 수 없으므로 기본값이 우선 필요합니다)
더하기, 빼기, 곱하기 모드를 이용한 액션은 절대적 모드를 이용한 모든 액션 아래에 위치해야 합니다. (절대적은 이것 위의 모든 것을 상속합니다) 오브젝트 항목에서 위에서 아래로 실행 순서가 정해지므로 이에 따라 액션 의 순서를 정하기 바랍니다.
이 파라미터는 액션이 다른 액션에 대해 갖는 영향의 크기를 정의합니다. 하단 액션이 마지막으로 게산된 것을 제외하고 레이어로 생각할 수 있으므로 가장 큰 영향력을 갖습니다. 예를 들어, 하이라키에서 마지막 모드의 영향을 낮춤으로써 절대적 모드로 설정된 액션의 두 가지 유형의 액션을 함께 혼합할 수 있습니다. 100%로 설정된 파라미터로, 마지막 액션은 모든 것을 상속하지만 값을 낮추면 이것 위의 액션과 모션을 혼합합니다. 이것은 또한 오브젝트의 움직임 방식의 전환 애니메이션을 하는 훌륭한 방법일 수 있으며, 파라미터 또한 애니메이션 될 수 있습니다.
수직이동 (P.Y), 가로이동 (P.X), 로컬X축회전 (R.X), 로컬Z축회전 (R.Z), 로컬Z축원점이동, 로컬Y축이동 (R.Y), 로컬Y축원점이동, 보폭길이 (P.Z), 편중 웨이트
이 값을 조절하여 이 값이 표현하는 특정 액션에 대해 모션의 양을 설정합니다. 이 파라미터의 앞에 위치한 액션의 이름은 오브젝트 항목에 선택된 액션의 유형에 따라 변경됩니다.
정의된 모션에 어느 정도의 랜덤을 부여합니다. 값이 클수록 랜덤에 대한 주파수와 크기가 커집니다.
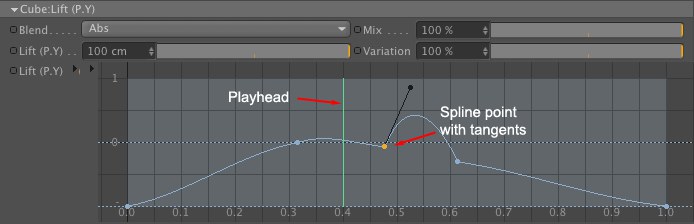
기능 그래프 인터페이스는 액션 모션의 중앙에 있습니다. 이것은 각 특정 액션에 대한 움직임을 설정하거나 세밀화합니다. 이것은 커브에 적용한 변화를 시각적으로 연결하도록 하기 위해 현재 모션 루프에 있는 프레임을 표현하는 플레이헤드를 갖습니다. (따라서 여러분은 걷기 사이클의 시작과 종료를 알고 있으며, 주어진 시간에 사이클의 어느 부분에 어느 커브 포인트가 제어하는지 알고 있습니다)
기능 그래프 인터페이스는 f-커브 편집과 매우 유사하므로 f-커브 편집에서 모션을 다듬는 것이 아주 용이합니다.
액션을 추가할 때, 액션이 프리셋 커브 모양에 영향을 받는 것을 알 수 있으며, 이는 대부분의 경우 유용하고 주어진 오브젝트에 대해 기대할 수 있는 모션의 힌트를 제공합니다.
모션 소스(이들은 모션 모드시 타임라인 좌측 열에 표시되어 있는 요소들입니다)를 링크 슬롯으로 드래그하여 모션 파라미터들을 액션이 붙어 있는 오브젝트에 적용합니다.
이 파라미터 값을 조절하여 모션 소스의 영향력을 결정합니다.
오브젝트의 모션을 구동하기 위해 사용되는 스플라인을 드래그&드롭합니다. 이것은 닫힌 스플라인 작업을 위해 초기에 설계되었습니다. 열린 스플라인은 잘 작동하지만, 모션을 구동하기 위해 스플라인에서 벗어나면 기대하지 않은 결과를 가져올 수 있습니다.
이 곳에서 오브젝트 파라미터들을 선택할 수 있습니다. 오브젝트의 유형에 따라 다른 파라미터들이 유효합니다. 예를 들어, 큐브 오브젝트는 위치, 크기, 회전과 같은 공통의 파라미터에 더하여 사이즈와 필렛 반경 파라미터를 제공합니다.
이 값을 이용하여 이 액션이 적용된 오브젝트에 미치는 영향의 크기를 정의할 수 있습니다.
이 입력 필드에서 파이썬 스크립트를 복사, 붙여넣기 등을 할 수 있습니다. 이들은 애니메이션이 실행되면 C모션에 의해 자동으로 실행됩니다.
드롭다운 메뉴를 이용하여 참조할 액션을 선택할 수 있습니다. 오브젝트 항목에서 이미 유효한 액션만이 메뉴에 나타나는데, 이러한 특정 액션이 다른 액션의 파라미터를 사례로 보기 때문입니다.