 Connettore
Connettore
Connettore
I Connettori limitano i movimenti/la rotazione dei Corpi Rigidi e dei Corpi Morbidi. Quindi, i Connettori possono essere utilizzati solamente su oggetti a cui è stato assegnato un tag Corpo Dynamics.
Senza i Connettori, i corpi Morbidi/Rigidi saranno influenzati solo dalle forze e dalle collisioni. Ad esempio, sarebbe molto difficile simulare una semplice funzione cerniera. Con un Connettore Cerniera, ciò non sarà un problema.
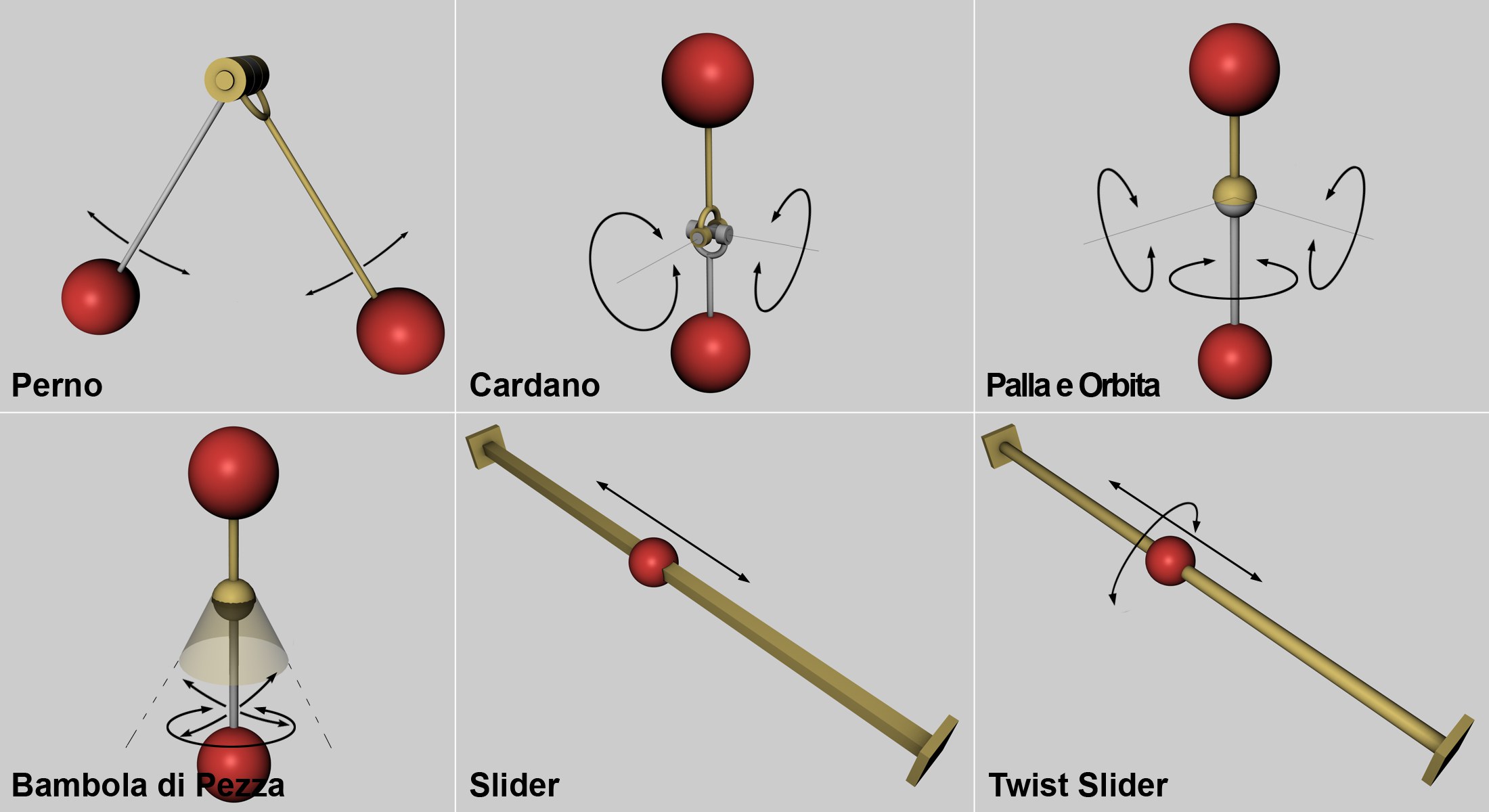 Alcuni dei Connettori disponibili. Le frecce
mostrano la direzione in cui gli oggetti possono essere mossi o ruotati. Le caratteristiche di questo
movimento non sono visualizzate - Planar, Box e Wheel Suspension - ma sono
essenzialmente la combinazione di queste.
Alcuni dei Connettori disponibili. Le frecce
mostrano la direzione in cui gli oggetti possono essere mossi o ruotati. Le caratteristiche di questo
movimento non sono visualizzate - Planar, Box e Wheel Suspension - ma sono
essenzialmente la combinazione di queste.
I Connettori sono visualizzati nella Viewport in modo da permettervi di riconoscere facilmente quale movimento/rotazione offre ogni Connettore. I Connettori che non funzionano (ad esempio se è disattiva l’opzione Dynamic o se ad almeno un oggetto è stato assegnato un tag Corpo Dynamics, o se l’oggetto in questione non è ancora stato influenzato) saranno visualizzati in rosso.
-
Selezionate Connettore dal menu principale:
-
Muovete o ruotate il Connettore in posizione nella Viewport (dove volete che la cerniera sia parallela agli
assi della slider)
-
Se i settaggi parametro del Connettore (tab Oggetto), utilizzate i campi Oggetto
A ed Oggetto B per collegare gli oggetti con i tag Corpo.
La posizione e l’orientamento del Connettore sono importanti!
Questi settaggi definiscono il movimento e gli assi di rotazione. Se guardate l’immagine sopra, la direzione in cui le sfere sono collegate alla Cerniera può ruotare a seconda di come è definito dalla posizione della cerniera. Lo stesso vale per i Connettori Slider, la cui posizione definisce la direzione in cui la sfera può viaggiare.
La cerniera sarà spesso posizionata lungo l’asse di rotazione. Date un’occhiata alla seguente scena d’esempio che contiene due cilindri e due cubi, ognuno con un tag Corpo Dynamics:
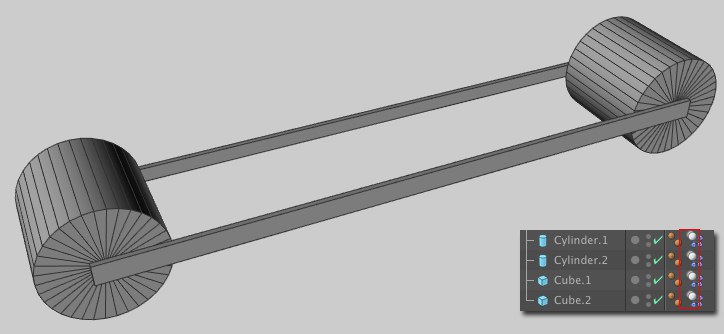 Queste quattro primitive saranno utilizzate per
creare un veicolo funzionante.
Queste quattro primitive saranno utilizzate per
creare un veicolo funzionante.
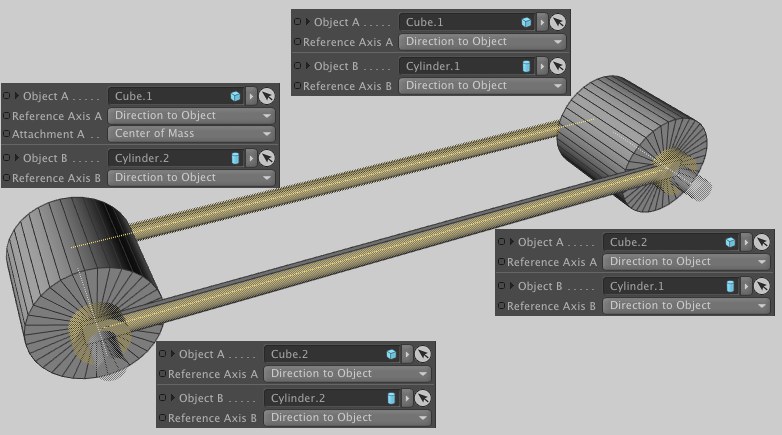
Senza i Connettori, questi elementi cadranno semplicemente a pezzi senza interagire l’uno con l’altro (oltre a provocare collisioni casuali). Al fine di rendere questo veicolo funzionante, saranno necessari quattro Connettori Cerniera che connettono i due cubi agli assi di rotazione dei cilindri. Create 4 ConnettoriCerniera. Due saranno collegati all’asse di rotazione del primo cilindro, mentre gli altri due saranno collegati all’asse di rotazione del secondo cilindro (la funzione Trasferisci è molto utile a questo scopo). Non importa dove è posizionato il Connettore lungo l’asse di rotazione - esso può essere mosso lungo l’asse senza influenzare la funzionalità stessa. A scopi organizzativi, comunque, è meglio posizionarlo dove necessario. In questo esempio, dobbiamo connettere i cubi ai cilindri. Successivamente, è necessario collegare i cilindri e i cubi (naturalmente ai corrispondenti punti di rotazione) nei settaggi Connettore (tab Oggetto);:
Avete già creato un veicolo funzionante che può, ad esempio, rotolare su un piano inclinato. I quattro oggetti creano un oggetto completo con dei cilindri rotanti. Questo veicolo può ora essere combinato con un attuatore come un Motore, che permetterà al veicolo di proseguire anche in pendenza.
2 Connettori possono essere combinati, ad esempio una Slider può essere collegata ad una Cerniera, come nel seguente esempio:
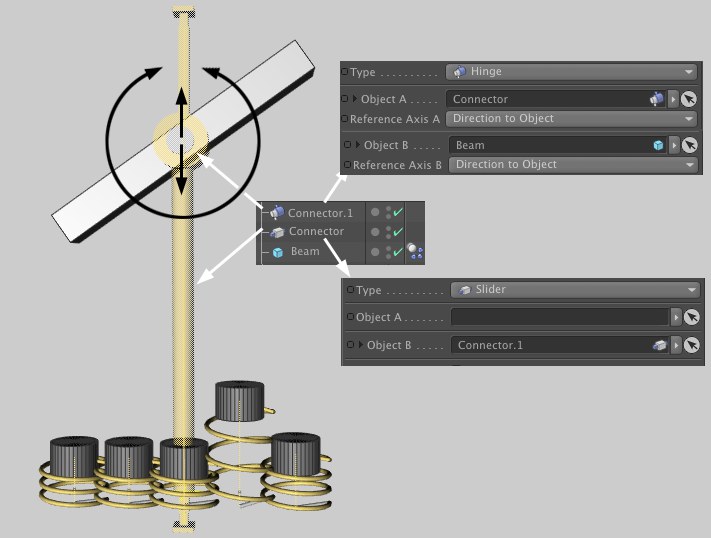 Un ConnettoreCerniera collegato con un ConnettoreSlider.
Un ConnettoreCerniera collegato con un ConnettoreSlider.
Le molle in basso, il cui stato cambia in modo completamente casuale, getta in aria il supporto. Il "Connettore" assicura che il supporto si muova solo in direzione verticale. Al fine di far ruotare il raggio al meglio, esso è stato collegato anche con un Connettore Cerniera ("Connettore.1"). Questo è tutto ciò che è necessario fare per creare questo lavoro perpetuo.
La combinazione diretta di due Connettori lineari (come Slider) o di rotazione (come Cerniera, Cardan, Ragdoll, Ball e Socket) non è possibile, a causa delle restrizioni matematiche.
Generalmente parlando, si dovrebbe evitare di combinare troppi Connettori. Altrimenti, le strutture degli elementi combinati diventeranno molto confuse. Normalmente, tutte le parti in movimento della scena sono modellate e sono sufficienti singoli Connettori per creare il movimento. La ruota di un’auto, ad esempio, è attaccata all’asse della vettura, attorno cui gira. Un semplice Connettore Cerniera è tutto ciò di cui avete bisogno per ottenere le funzionalità desiderate.
Duplicare gli oggetti collegati con i Connettori
Può essere duplicato un intero sistema Dynamics, inclusi i Connettore, le Molle, i Motori e gli elementi ad essi collegati. Per fare ciò, tutti gli elementi devono essere posizionati all’interno di un comune oggetto Nullo che deve essere reso un oggetto Figlio del generatore.
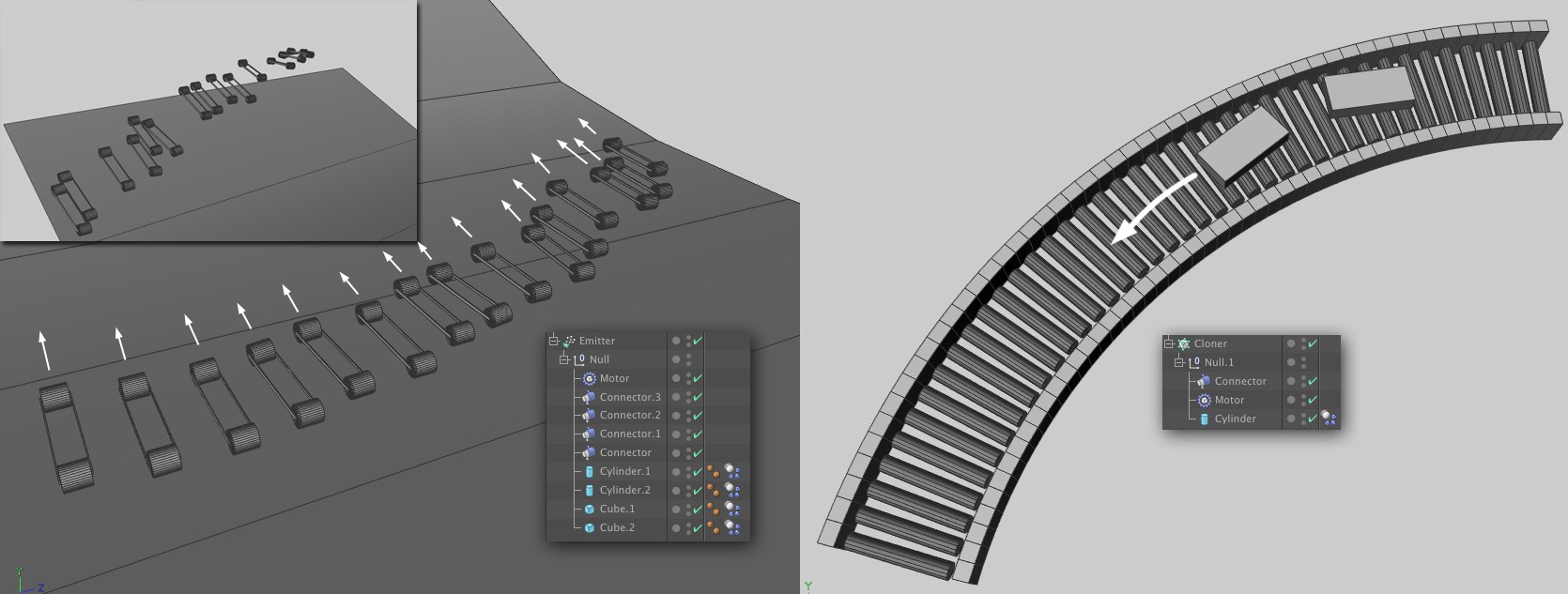
A sinistra nell’immagine sotto, un veicolo è stato equipaggiato con un Motore e l’intera costruzione è stata resa Oggetto Figlio di un Emettitore. L’Emettitore imposta la circolazione del veicolo in modo che possa girare in modo indipendentemente. A destra potete vedere un semplice cilindro, spinto da un motore e clonato in forma curva utilizzando un oggetto Clona. Il risultato è un trasportatore.
Assicuratevi di dare all’oggetto collisione che non è influenzato da Dynamics (come il piano a sinistra, o le
tracce sulla destra) la forma esatta (molto spesso <Forma
Se avete l’impressione che i Connettori non stiano facendo esattamente ciò che si desidera, rivolgete la vostra attenzione ai parametri del calcolo Dynamics che controllano la precisione. I più importanti sono: Passi per Fotogramma, Massima iterazione Risolutore per Passo e Soglia Errore.
Un altro motivo che può causare delle imprecisioni può essere una grande differenza della massa degli oggetti (ciò accade anche se Forma è stata impostata ad Off nella tab Collisione del tag Corpo Dynamics!). Generalmente parlando, ciò non è adatto alle simulazioni fisiche.