Soft Body
Soft Bodies sind im Gegensatz zu Rigid Bodies verformbar. Während ein Rigid Body einen festen, polygonalen Körper darstellt, der nur als ganzes auf Kollisionen reagiert, besteht ein Soft Body aus diversen (nämlich den Objektpunkten) kleinen Massenpunkten, die alle über viele Federn miteinander verbunden sind. Greift nun eine Kraft an einem Soft Body an, wird diese Kraft vom lokalen Wirkbereich über die Federkräfte an die anderen Punkte weitergegeben, sodass die Soft Body Punkte nacheinander und das ganze Konstrukt damit also flexibel reagiert. Soft Bodies sind also generell für verformbare Objekte vorgesehen, wie beispielsweise Bälle, Stoffe (beachten Sie in diesem Zusammenhang die für Stoffe/Kleidung optimierte Kleidungsengine), dünne Bleche etc.
Übrigens können auch Splines als Soft Bodies verwendet werden. Allerdings sind diese mehr für einfache Dinge zu gebrauchen. So funktionieren Sie beispielsweise nicht besonders gut mit Konnektoren und sind daher als Seil nur eingeschränkt zu verwenden. Um jedoch einen Spline mit eingeschalteter Kollisionsabfrage über anderen Objekte fallen zulassen, sodass sich seine Gestalt anpaßt, ist die Funktionalität durchaus zu gebrauchen.
Splines funktionieren besonders gut, wenn
- Sie ihnen eine Masse geben, die im Bereich der Massen liegen, mit denen der Spline-Soft Body kollidiert. Ansonsten ist die Masse extrem klein, da Splines ja kein Volumen haben.
- die Splines eine gleichmäßige Unterteilung mit ausreichend Zwischenpunkten haben (Zwischenpunkte
Gleichmäßig ).
Beachten Sie übrigens beim Verwenden eines Kugel-Grundobjekts, dass der Typ Ikosaeder am besten funktioniert. Die Option Perfekte Kugel sollte auch deaktiviert werden.
Hier definieren Sie:
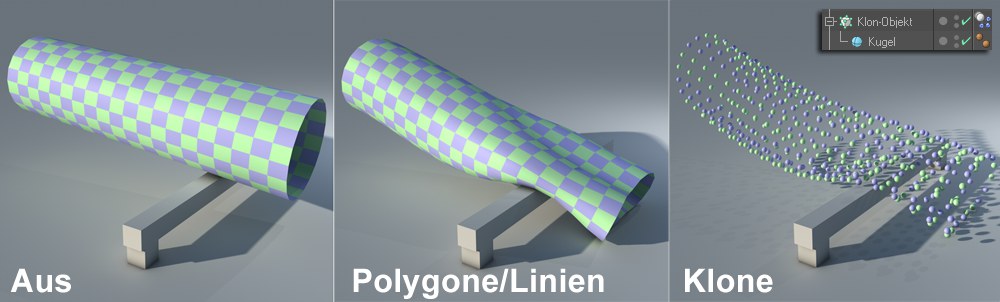
- Aus: Das Objekt ist kein Soft Body, sondern ein Rigid Body.
- Polygone/Linien: Das Objekt ist ein Soft Body im klassischen Sinne.
- Klone: Hiermit können Klonansammlungen (wie sie z.B. vom Klon-Objekt erzeugt werden) genau wie ein Soft Body untereinander mit Federn verbunden werden. Beachten Sie, dass im Klon-Objekt ebenfalls die Option Individuelle Elemente auf Oberste Ebene stehen sollte. Sie können einzelne Klone solcherlei Klonkonstruktionen mittels MoGraph-Selektion festnageln (s. Dynamisch).
Der Ruhezustand ist normalerweise die Federkonfiguration mit ihren Ruhelängen definiert in Animationsbild 0.
In dieses Feld können nun weitere Ruhezustände (also Kopien des Soft Bodies im Objekt-Manager; gleiche Punktzahl notwendig) eingesetzt (oder auch animiert) werden. Praktisch bedeutet das, der Soft Body kann nacheinander verschiedene Gestalten annehmen.
Das Objekt (Position, Ausrichtung, Sichtbarkeit unerheblich), dass sich in diesem Feld befindet, kann beispielsweise durch Deformer verformt werden und gibt dann diesen Ruhezustand unverzüglich an den Soft Body weiter, der sich dann quasi federnd in den neuen Zustand begibt. Ein dynamisches Morphen, wenn Sie so wollen.
Wie schnell sich der Soft Body in die neue Form begibt, hängt von seinen Federstärkeeinstellungen ab. Wenn Sie überwiegend weiche Federn definieren, wird er eher langsam, fliessend seine neue Form annehmen. Verwenden Sie harte Federn (vor allem bei Härte der Formbewahrung), "explodiert" er gar in die neue Form.
Es sind diverse spektakuläre Effekte mit diesem Parameter möglich!
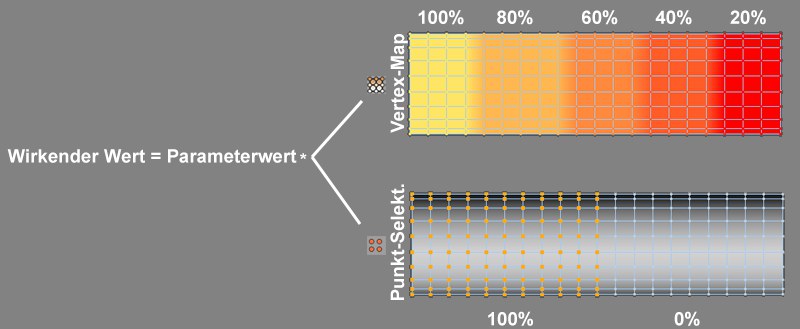
Normalerweise wird die Gesamtmasse eines Soft Bodies gleichmäßig auf alle seine Objektpunkte aufgeteilt. Wenn das nicht gewünscht ist, so können Sie hier mittels Punkt-Selektions-Tags (hierfür gilt: nicht selektierte Punkte haben die Masse 0) oder Vertex-Maps beeinflussen.
Beachten Sie, dass Objektpunkte mit der Masse "0" an Ort und Stelle festgenagelt, also fixiert sind (für aus Klonen bestehende Soft Bodies machen Sie dies mit MoGraph-Selektion).
Verschiedene Massenverteilungen sorgen für unterschiedliches Schwingverhalten und auch andere Massenschwerpunkte.
Die aktivierte Option benutzt einen stabileren, aber auch rechenintensiveren Algorithmus. Sie können probeweise die Option deaktivieren. Wenn Ihre Simulation dabei stabil läuft, so haben Sie Glück gehabt und können sich über flüssigere Darstellung freuen. Sie können auch probieren, Zwischenschritte langsam zu erhöhen, falls es zu Instabilitäten kommt.
Allgemein dämpft der akkurate Solver die Soft Body-Simulation auch etwas stärker, d.h.der Soft Body kommt etwas schneller zur Ruhe.
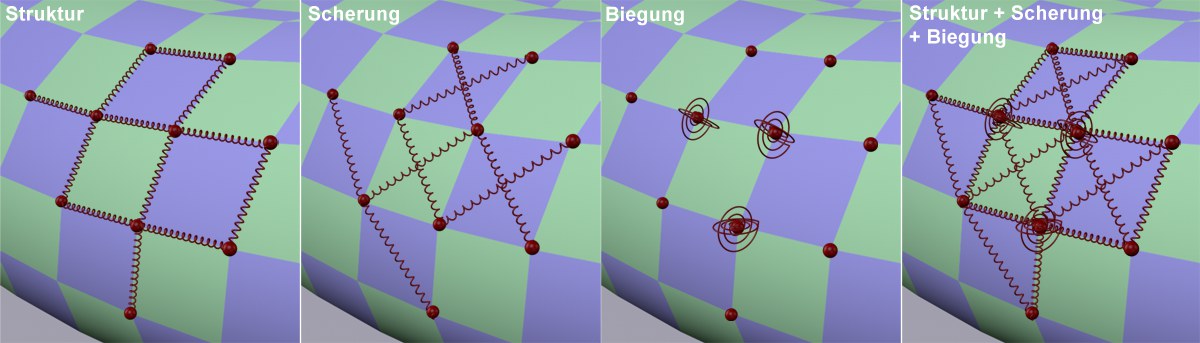 Exemplarische Federanordnung der verschiedenen Typen. Es sind nur die vollständigen Federn der sichtbaren Punkte eingeblendet.
Exemplarische Federanordnung der verschiedenen Typen. Es sind nur die vollständigen Federn der sichtbaren Punkte eingeblendet.Um aus einem normalen Objekt ein Soft Body zu machen, werden alle Objektpunkte als kleine Massen angesehen, die untereinander mit 3 verschiedenen Federtypen (im Folgenden auch gerne mal als "klassische Federarten" bezeichnet) verbunden sind. Jeder Federtyp kann separat reguliert werden und mittels Punkt-Selektions-Tag oder Vertex-Maps auf Punktebene fein reguliert werden.
Normalerweise werden im Animationsbild 0 alle Federn in ihrer Ruhelänge angenommen, d.h. in exakt diesem Soft Body-Zustand üben alle Federn die Kraft 0 aus (natürlich nur, wenn Ruhelänge mit 100% definiert ist). Sobald die Simulation dann läuft, greift die Gravitation an die Massenpunkte, Federn werden ausgelenkt und beginnen zu wirken.
Zur Erklärung der verschiedenen Federarten wird dieser Soft Body verwendet, der an seinem hinteren Ende (links) mittels eines Konnektors befestigt ist und auf einen Querbalken fällt. Normalerweise ergibt sich bei allen wirkenden 3 Federarten in etwa so ein Effekt (bei stärkerer Objektunterteilung müssten die Federstärken erhöht werden, um ähnliche Effekte zu erreichen):
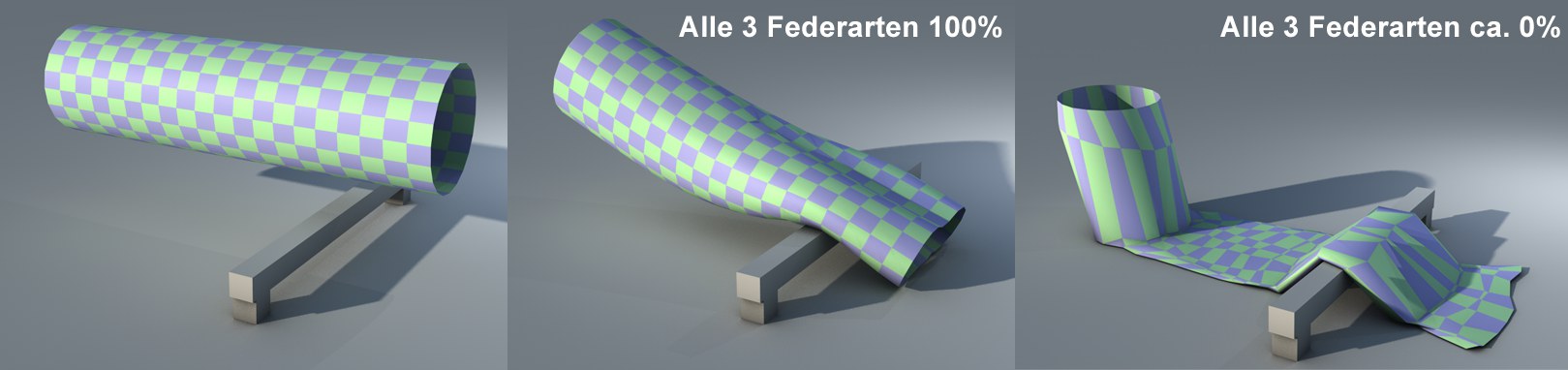
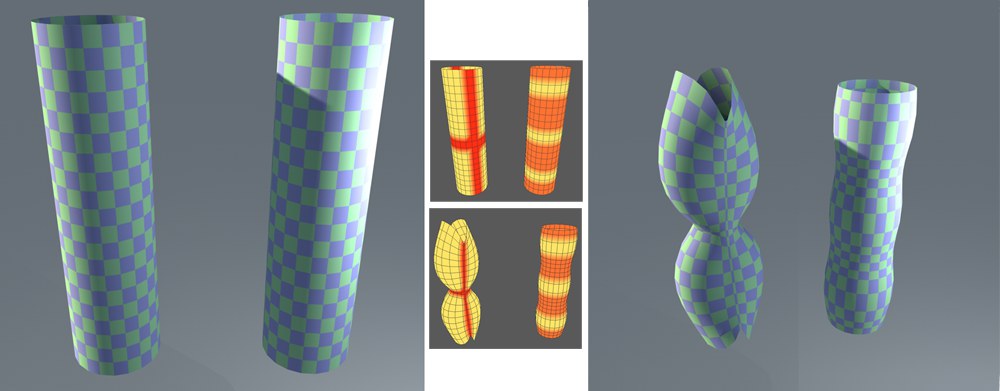
Bei dieser Federart werden an jedem Objektpunkt Federn angebracht, die ihn mit all seinen Nachbarpunkten entlang der Polygonkanten verbinden. Der zugehörige Parameter definiert die Federhärte, je härter eine Feder, desto steifer ist sie.
Am besten sieht man deren Funktionalität, wenn die Strukturfedern (=0) ausgeschaltet sind:
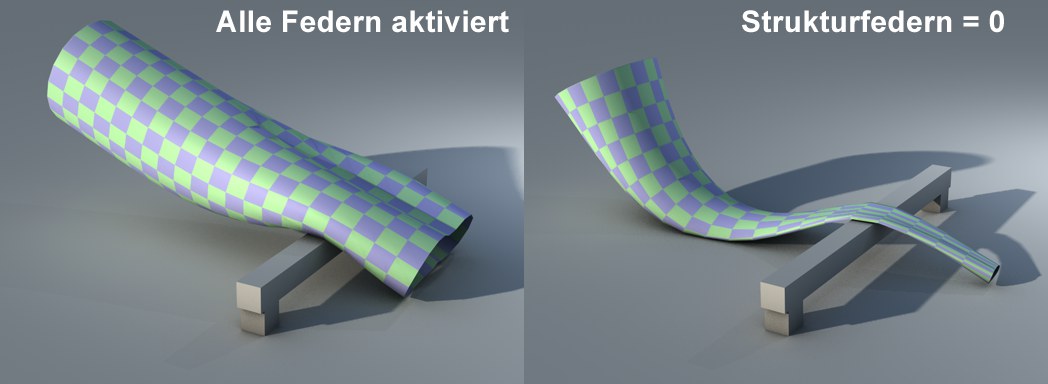
Die Strukturfedern sorgen primär für die Aufrechterhaltung der äußeren Soft Body Gestalt. Im Bild erkennen Sie, wie rechts der Schlauch sich verjüngt, weil diese strukturgebenden Federn fehlen und die Polygone sich fast beliebig in ihrer Gestalt ändern können.
Mit der Dämpfung definieren Sie, wie die Strukturfedern beim Schwingen gedämpft werden. Je größer der Wert, desto schneller klingt die Federschwingung ab.
Mit der Map (Punkt-Selektions-Tag oder Vertex-Maps) kann das auch auf Punktebene gesteuert werden. Dabei gilt für eine Punkt-Selektion:
- nicht selektiert = 0%
- selektiert = 100%
und für Vertex-Maps je nach individueller, aufgemalter Wichtung:
Elastische Grenze [0..+∞%]
Map
Genau wie Einzelfedern können sich auch die vielen Strukturfedern eines Soft Bodies plastisch verformen (s.a. Elastische Dehnungsgrenze), sobald eine gewisse Dehnung erreicht ist. Diese Grenzdehnung wird mit Elastische Grenze bezogen auf die Ruhelänge eingestellt. Ein Wert von 0 schaltet die plastische Verformung aus.
Beachten Sie, dass je nach Projekt auch Elastische Grenze bei den Biegefedern justiert werden muss, um eine bleibende plastische Verformung des Soft Body zu gewährleisten.
Für die Map gilt das schon hier beschriebene.
Diese Federart verbindet bei viereckigen Polygonen die gegenüberliegenden Punkte diagonal und sorgt dafür, dass das Polygon nicht zusammen klappt. Der zugehörige Parameter definiert die Federhärte, je härter eine Feder, desto steifer ist sie.
Am besten sieht man deren Funktionalität, wenn die Scherungsfedern (=0) ausgeschaltet sind:
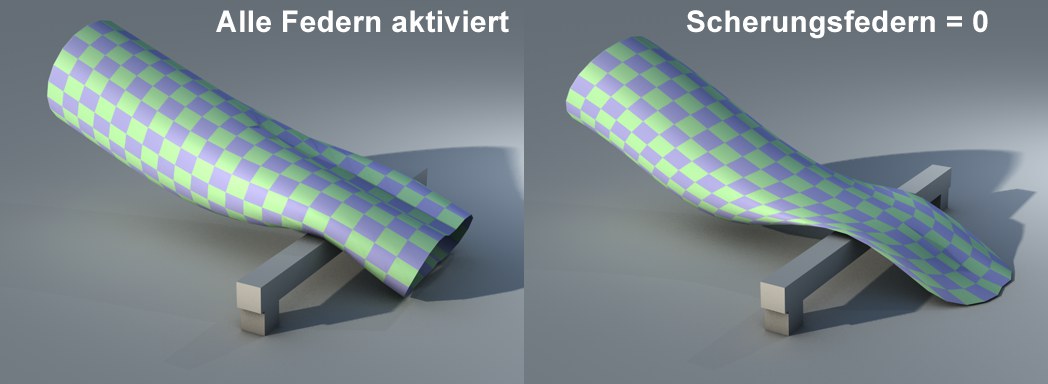
Beachten Sie, wie sich rechts die Polygone im Bereich des Knicks zu spitzen Rauten verformt haben, da die ausgeschalteten Scherungsfedern ein paralleles Verschieben der Punktreihen nicht verhindern können.
Mit der Dämpfung definieren Sie, wie die Scherungsfedern beim Schwingen gedämpft werden. Je größer der Wert, desto schneller klingt die Federschwingung ab.
Für die Map gilt das schon hier beschriebene.
Die Biegungsfedern sind im Gegensatz zu den anderen beiden Federarten keine Linearfedern, sondern Drehfedern, die auf jedem Objektpunkt sitzen und versuchen, angrenzende Kanten winkelmässig mehr oder weniger – je nach Federstärke – konstant zu halten. D.h. Biegung kann völlig unabhängig vom Objektstreckverhalten reguliert werden (das war bei früheren Dynamics-Versionen < R 11.5 anders, dort wurde mit Linearfedern gearbeitet, die immer auch das Streckverhalten beeinflusst haben). Der zugehörige Parameter definiert die Federhärte, je härter eine Feder, desto steifer ist sie.
Am besten lässt sich das Verhalten von Biegungsfedern auf einen Soft Body erkennen, wenn diese ausgeschaltet (=0) werden:
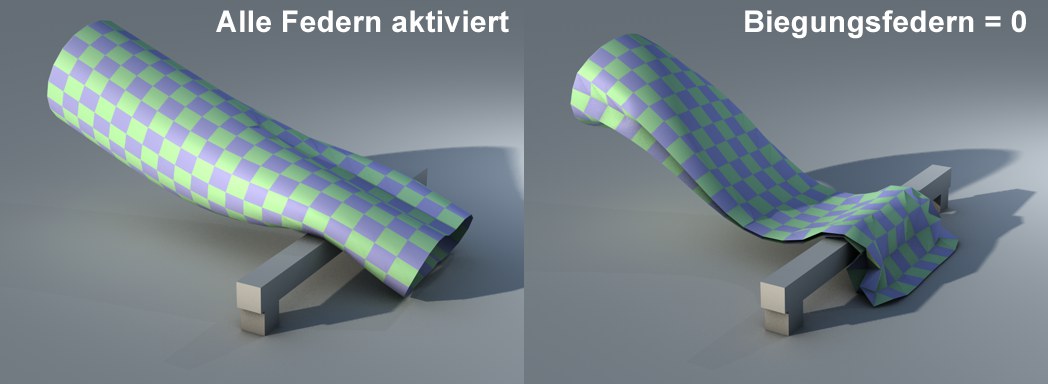
Wie Sie sehen, können Polygone gegeneinander eingeklappt werden, wenn die Biegungsfedern nicht mehr den Winkel zu angrenzenden Polygonen konstant halten. Mit der zugehörigen Map können Sie beispielsweise gewisse Bereiche definieren, wo sich der Soft Body dann zusammenfalten soll.
Mit der Dämpfung definieren Sie, wie die Biegungsfedern beim Schwingen gedämpft werden. Je größer der Wert, desto schneller klingt die Federschwingung ab.
Mit der Map (Punkt-Selektions-Tag oder Vertex-Maps) kann das auch auf Punktebene gesteuert werden.
Für die Map gilt das schon hier beschriebene.
Elastische Grenze [0..180°]
Map
Genau wie Einzelfedern können sich auch die vielen Biegungsdrehfedern eines Soft Bodies plastisch verformen (s.a. Elastische Dehnungsgrenze), sobald eine gewisse Dehnung erreicht ist. Diese Grenzdehnung wird mit Elastische Grenze bezogen auf den Ruhewinkel eingestellt. Ein Wert von 0 schaltet die plastische Verformung aus.
Für die Map gilt das schon hier beschriebene.
 Eine Vertex-Map (je roter, desto kleiner die Wichtung, also desto kleiner die Federruhelänge) bei Ruhelänge.
Eine Vertex-Map (je roter, desto kleiner die Wichtung, also desto kleiner die Federruhelänge) bei Ruhelänge.Im Ruhezustand hat der Soft Body die modellierte, unveränderte Gestalt. Alle zwischen den Objektpunkten geknüpften Federn haben dabei ihren Ruhezustand (sofern Ruhelänge auf 100% steht), d.h. sie wirken mit keiner Kraft. Sobald die Simulation gestartet wird, wirkt die Gravitation auf die Objektpunkte und Kollisionen erfolgen. Dadurch werden Objektpunkte gegenüber benachbarten ausgelenkt und die Federkräfte (je weiter die Feder bzgl. ihres Ruhezustandes ausgelenkt wird, desto mehr Kraft wendet sie auf, um in ihren Ruhezustand zurückzustreben) beginnen zu wirken.
Mit Ruhelänge können Sie nun eine von den 100% abweichende Länge definieren. Sind die Werte kleiner als 100%, werden sich die entsprechenden Federn zusammenziehen und umgekehrt. Für die Map gilt das schon hier beschriebene.
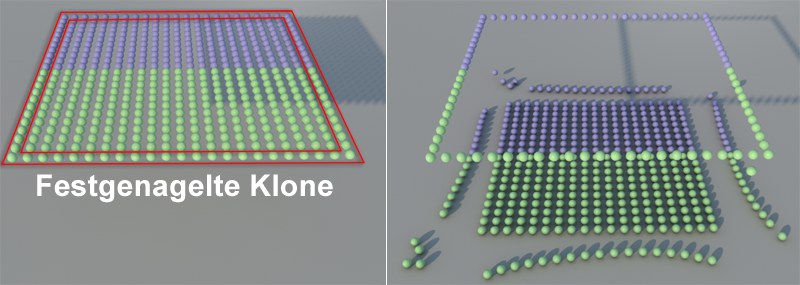 Die Klonkonstruktion reisst unter ihrem eigenen Gewicht.
Die Klonkonstruktion reisst unter ihrem eigenen Gewicht.Wenn Sie bei Soft Body Klone definiert haben, werden diese beiden Parameter eingeblendet. Die Zerreisslänge definiert, bei wie viel Prozent der Ruhelänge die jeweilige Feder bricht.
Die Map ist ausschliesslich für den Klon-Objekt-Modus Objekt gedacht. Die Map bezieht sich dann auf das Objekt, auf dessen Punkte die Klone platziert werden.
Wenn bei Soft Body
Für die Map gilt das schon hier beschriebene.
Mit der Dämpfung definieren Sie, wie die Federn (gilt für die im vorherigen Absatz beschriebenen Drehfedern) beim Schwingen gedämpft werden. Je größer der Wert, desto schneller klingt die Federschwingung ab.
Für die Map gilt das schon hier beschriebene.
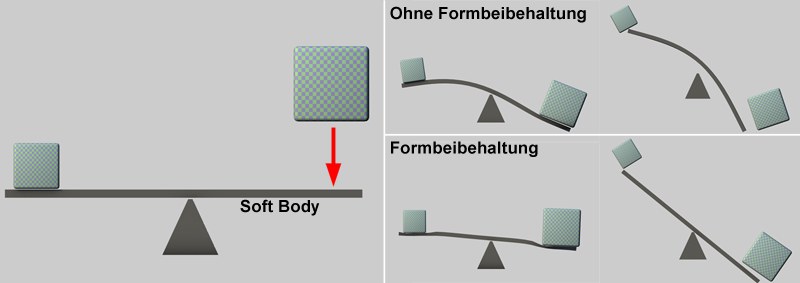 Die Formbewahrung behält die Gesamtform des Soft Bodies – abhängig von Härte – größtenteils bei (von ein paar leichten, kurzen Verformungen bei lokalen Kollisionen abgesehen).
Die Formbewahrung behält die Gesamtform des Soft Bodies – abhängig von Härte – größtenteils bei (von ein paar leichten, kurzen Verformungen bei lokalen Kollisionen abgesehen).Die Formbewahrungsfunktionalität speichert intern ein Abbild des unverformten Objekts, und versucht – je nach eingestellter Härte – diese Form beizubehalten. Die klassische Soft Body-Variante mit den oben beschriebenen 3 Federarten neigt dazu, ihre ursprüngliche Gesamtform zu verlieren, da jeder Objektpunkt mittels Federn nur seinen unmittelbaren Nachbarn "sieht". Zwar können diese Federstärken sehr hoch gesetzt werden, nur wird die Simulation dann zunehmend instabil, was durch rechenintensive Vergrößerung von Zwischenschritte ausgeglichen werden müsste.
Die Formbewahrung lässt sich dagegen schnell und stabil berechnen.
Wo immer es also drauf ankommt, ursprüngliche Formen zu erhalten (oder auch nur gewisse Bereiche – mittels einer Map – formstabil zu erhalten), sind die Einstellungen hier angeraten. Meistens funktionieren sie am besten, wenn sie mit den 3 Federarten (s.o.) kombiniert werden (diese also nicht gleich 0 sind, können dann aber reduziert werden).
Weniger geeignet ist die Formbewahrung als Ganzes für Objekte mit kleiner bis nicht vorhandener Biegefestigkeit, also z.B. Stoffe.
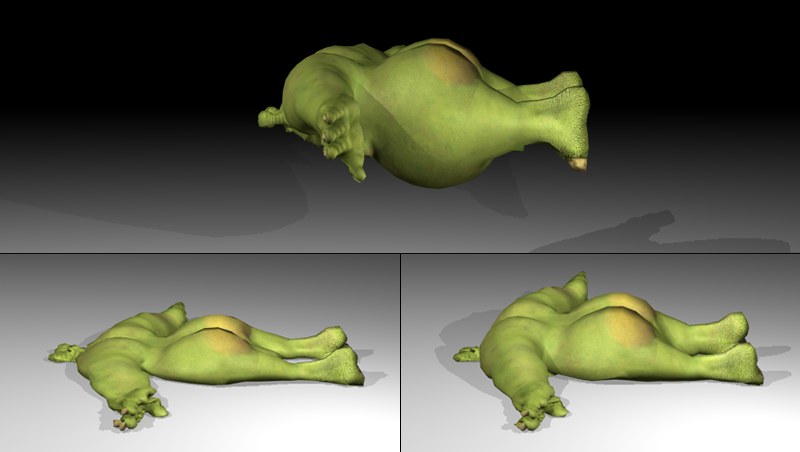 Flabio küsst den Asphalt, links kleine, rechts grosse Härte. Gezeigt wird jeweils der (kurze) Zustand der Ruhe, bevor er zurückfedert.
Flabio küsst den Asphalt, links kleine, rechts grosse Härte. Gezeigt wird jeweils der (kurze) Zustand der Ruhe, bevor er zurückfedert.Mit der Härte stellen Sie ein, wie genau der Soft Body mit seinen Punkten von der internen Originalform abweichen darf. Dies ist eine Federstärke, d.h. je kleiner die Härte, desto weicher die Federn, desto mehr Verformung ist bei Kollisionen möglich und umgekehrt.
Sehr gut lässt sich auch eine sprungartig animierte Härte (ausgehend von 0) verwenden, um z.B. vorher auf Soft Body gefallene Objekte weg zu katapultieren. Der Soft Body nimmt dann sehr schnell wieder seine ursprüngliche Gestalt an.
Für die Map gilt das schon hier beschriebene.
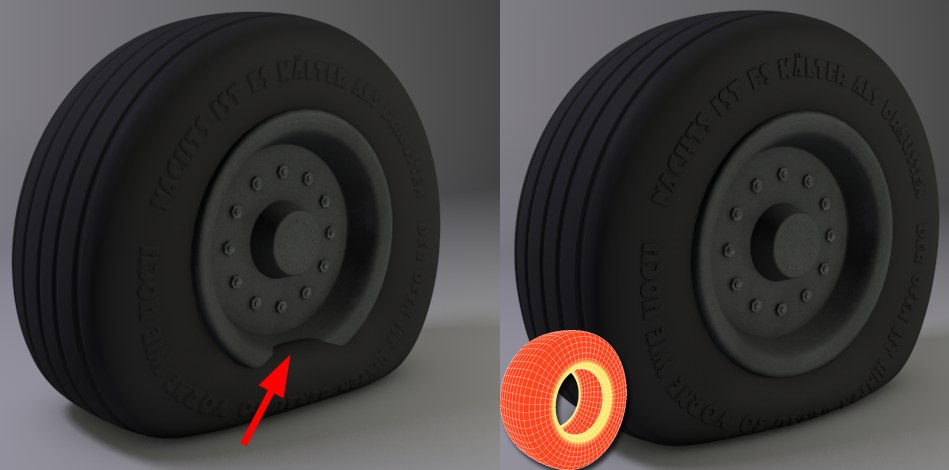
Damit lassen sich dann gut nur bestimmte Bereiche eines Soft Bodies "versteifen", wie bei folgendem Beispiel. Hier wurde ein Flugzeugreifen samt Felge modelliert. Der Reifen soll sich standesgemäß verformen, wenn er mit niedrigem Luftdruck auf der Erde steht. Dafür wurden die Reifenpunkte gewichtet und zwar maximal in Felgennähe (gelb), d.h. hier ist die Formbewahrung maximal ausgeprägt. Der Reifen-Soft Body verformt sich dann nicht in Felgennähe und durchdringt nicht den Felgenrand (der ja selbst kein Soft Body ist).
 Voreinstellte Werte für die 3 Federarten, rechts zusätzlich mit definierter Härte und Map.
Voreinstellte Werte für die 3 Federarten, rechts zusätzlich mit definierter Härte und Map.Möchten Sie mehrere Bereiche unabhängig voneinander versteifen, hätten Sie mit der eben beschriebenen Methode das Problem, dass sich diese nicht mehr gegeneinander bewegen lassen. Ein Workaround wäre hier eine Feder mit der Stärke 0 und einer Bindung A von
Sofern die klassischen 3 Federarten nur wenig Effekt haben und der Hauptteil der Berechnung von der Formbewahrung kommt, kann es zu einer Art "Pumpen" (Volumenschwankung) des Objekts kommen. Dieses lässt sich mit hohen Werten hier ausschalten.
Hiermit lässt sich die Federdämpfung (von Härte) einstellen.
Je größer der Wert, desto schneller klingt die Federschwingung ab. Mit der Map (Punkt-Selektions-Tag oder Vertex-Maps) kann das auch auf Punktebene gesteuert werden.
Für die Map gilt das schon hier beschriebene.
Elastische Grenze [0..+∞m]
Map
Genau wie Einzelfedern können sich auch die Federn, die zur Formbewahrung herangezogen werden, ab einer gewissen Dehnlänge plastisch verformen. Diese Dehnlänge wird mit Elastische Grenze, bezogen auf die unverformte Ruhelänge, eingestellt. Ein Wert von 0 schaltet die plastische Verformung aus.
Für Soft Bodies können mit dieser Funktionalität also bleibende Verformungen realisiert werden.
Für die Map gilt das schon hier beschriebene.
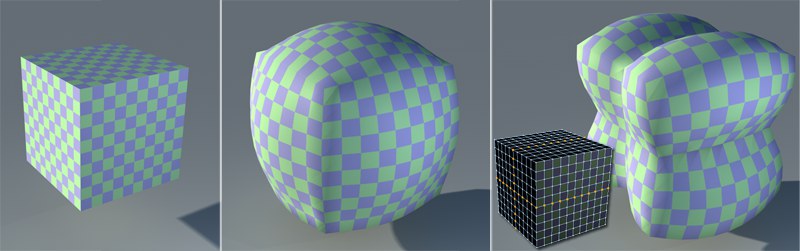 Der links abgebildete Würfel wird aufgeblasen, wobei sich die in der Mitte abgebildete Form ergibt. Rechts zusätzlich mit einem Punkt-Selektions-Tag bei Parameter Härte.
Der links abgebildete Würfel wird aufgeblasen, wobei sich die in der Mitte abgebildete Form ergibt. Rechts zusätzlich mit einem Punkt-Selektions-Tag bei Parameter Härte.Diese 3 Parameter können sich nur wirken, wenn das Objekt geschlossen ist. Das Objekt wird aufgepumpt, indem eine in Richtung der Oberflächennormalen nach außen wirkende Kraft angelegt wird. Damit lassen sich beispielsweise zusammengefaltete Objekte aufblasen.
Der Druck ist wie in der Realität auch, eine Kraft, die auf jede Oberfläche drückt und somit versucht, das Objekt aufzublähen. Positive Werte vergrößern, negative Werte verkleinern ("Vakuum") das Volumen und damit das Objekt.
Beachten Sie in diesem Zusammenhang auch den nächsten Parameter Volumenbewahrung, der ebenfalls – aber abhängig vom Volumen – Druck ausüben kann.
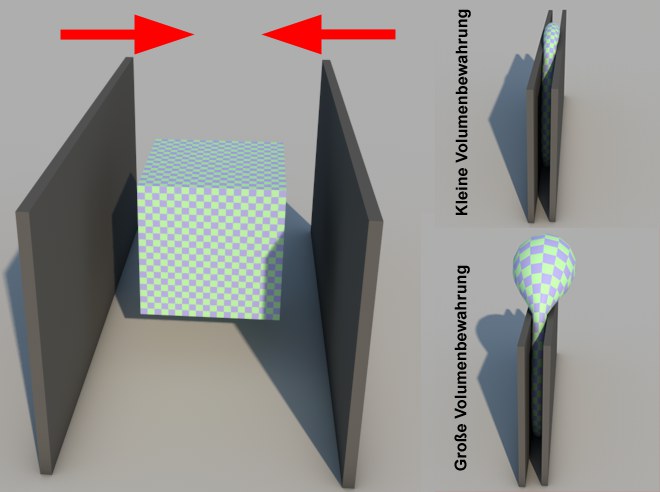 Beim Zusammendrücken eines Soft Bodies bleibt das Objektvolumen bei großer Volumenbewahrung gleich.
Beim Zusammendrücken eines Soft Bodies bleibt das Objektvolumen bei großer Volumenbewahrung gleich.Die Volumenbewahrung versucht mit einer Kraft auf die Oberflächen das Ruhevolumen beizubehalten. Ist das aktuelle Volumen größer als das Ruhevolumen, ist das eine Kraft nach innen, ist es kleiner, eine Kraft nach außen.
Die Größe dieser Kraft kann hier eingestellt werden.
Je größer der Wert, desto inkompressibler ist quasi das im Körper enthaltene Medium. D.h. wenn Sie den Soft Body zusammendrücken, versucht er, um das selbe Volumen aufrecht zu erhalten, sich an anderer Stelle auszudehnen
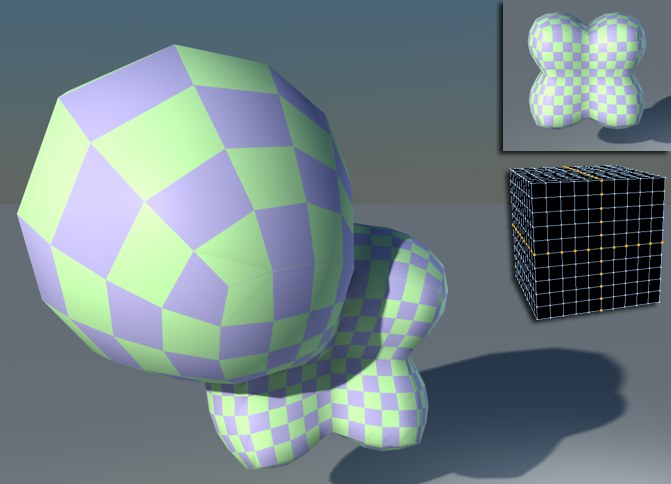 Ohne Volumenbewahrung kann es auch zu Ausblähungen bzw. zu unkontrollierten Objektausdehungen kommen. Rechts die Punkt-Selektion abgebildet, die mittels des Parameters Härte das Objekt einschnürt.
Ohne Volumenbewahrung kann es auch zu Ausblähungen bzw. zu unkontrollierten Objektausdehungen kommen. Rechts die Punkt-Selektion abgebildet, die mittels des Parameters Härte das Objekt einschnürt.Hiermit lassen sich die durch Druckeffekte bedingten Schwingungen dämpfen. Je größer der Wert, desto schneller klingt die Schwingung ab.