Colliders
Use this option to define how collisions will be solved.
The Collision Deformer will assume the Collider object is inside the geometry to be deformed and will push the geometry accordingly. This is based on normal direction, so the "inside" will be the back of each face.
Similar to the Inside mode, except the geometry of the deformed object will be stretched to always collide with its collider.
You can assign a Weight tag to the deformed object and set the Colliders in the Weight tag to paint the influence they will have on the deformed geometry. This lets you refine how the stretching should be done.
You can also adjust the Size parameter found in the Collision Deformer’s Advanced tab to prevent the stretched points from intersecting the collider's geometry.
The Collision Deformer will assume the Collider object is outside the geometry to be deformed and will push the geometry accordingly. This is based on normal direction, so the "outside" will be the front of each face.
Similar to the Outside mode, except the geometry of the deformed object will be stretched to always collide with its collider. Since it's based on volume, the deformed object needs to have a volume.
This is the default mode. It will decide if the object is outside or inside of the geometry to be deformed based on how far its points intersect those of the Collider object. If the Collider object is dragged too far inside the geometry the deformed object's faces will pop up on the other side, pushed in the opposite direction (useful if you want to simulate two shapes sort of combining together over time).
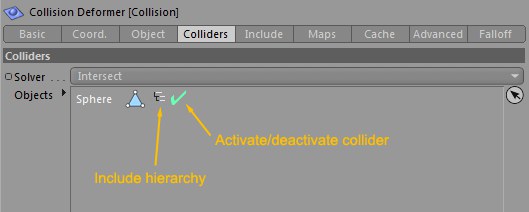
Drag all objects that need to collide with the deformed object here. You can also include the Child objects (the hierarchy) of the Collider object and quickly activate/deactivate individual colliders without removing them from the list via the Toggle icon. You can also restrict which part of a Collider object will be used as collider, by dragging a polygon selection into the list. This method works best with closed objects, though.