Traqueur de mouvement
Qu’est-ce que le motion tracking?
Le motion tracking, également connu sous le nom de match moving, désigne la reconstruction des éléments relatifs à la caméra d’origine (position, orientation, distance focale) à partir d’une vidéo, et donc l’insertion dans une vidéo réelle d’objets 3D dont la position, l’orientation, l’échelle et le mouvement correspondent à la séquence originale.
Par exemple, si vous souhaitez insérer un objet rendu dans une vidéo originale, cette vidéo doit être analysée correctement et l’environnement 3D doit être reconstruit de façon à ce que la perspective et les mouvements de caméra soient reproduits précisément. Remarque : l’environnement 3D comprend la caméra elle-même ainsi que les points d’intérêt et leur position dans l’espace en trois dimensions.
La fonction Traqueur d’objets est comme une fonction du traqueur de mouvements. Vous trouverez plus d’informations à la page Traqueur d’objets.
Ce procédé est complexe et doit donc s’effectuer en plusieurs étapes :
-
Des points distinctifs et faciles à suivre (appelés pistes) sont déterminés dans la vidéo, et leur mouvement est suivi. Cette opération, qui peut s’effectuer automatiquement, manuellement ou des deux manières en même temps, est le suivi 2D.
-
Ces pistes permettent de créer dans l’espace un amas de points (constitués de points de suivi) et de reconstruire les paramètres de la caméra.
- Plusieurs propriétés d’aide (propriétés Contrainte) peuvent être utilisées pour calibrer la scène ; en d’autres termes, les amas de points dont le placement dans l’espace 3D est plus ou moins bon (ce qui comprend bien sûr la caméra pour sa part bien définie) seront orientés en fonction du système de coordonnées du monde.
En bref : comment fonctionne le traqueur de mouvements ?
Le traqueur de mouvements est basé sur l’analyse et le tracking (pistage ou traquage) de points marqués (pistes) dans la vidéo originale. Les positions dans l’espace 3D peuvent être calculées à partir des différentes vitesses de mouvement de ces pistes en fonction de leur distance par rapport à la caméra (cet effet s’appelle le défilement parallaxe).
 Mouvement horizontal de la caméra de gauche à droite.
Mouvement horizontal de la caméra de gauche à droite.
Observez la différence entre la vidéo 1 et la vidéo 2 dans l’image ci-dessus. La caméra se déplace à l’horizontale de gauche à droite. Le vase rouge au fond semble se déplacer sur une plus petite distance (voir la longueur de la flèche) que le vase bleu. Ces différences entre les parallaxes peuvent être utilisées pour définir une position correspondante dans l’espace 3D (que nous définirons désormais sour le nom de piste) par rapport à la caméra.
Logiquement, le traqueur de mouvement se fait plus facilement si la vidéo comprend plusieurs parallaxes, c’est-à-dire plusieurs zones possédant chacune une vitesse de défilement parallaxe différente, du fait de leur distance par rapport à la caméra.
Imaginons que vous avez une séquence de vol au-dessus d’une ville remplie de gratte-ciel : il s’agit du scénario parfait pour le traqueur de mouvements de Cinema 4D, grâce aux bâtiments clairement séparés, au réseau de rues en forme de grille et aux contours clairement définis.
Les grands espaces ouverts ou les plans panoramiques (pour lesquels la caméra effectue une rotation sur place), en revanche, sont bien plus difficiles à analyser, à cause du manque de points de référence distinctifs dans le premier cas, et de parallaxes dans le second. Il faut alors sélectionner un mode résolution précis dans l’onglet Reconstruction pour définir le type de traqueur de mouvements à appliquer.
Comment utiliser le traqueur de mouvements
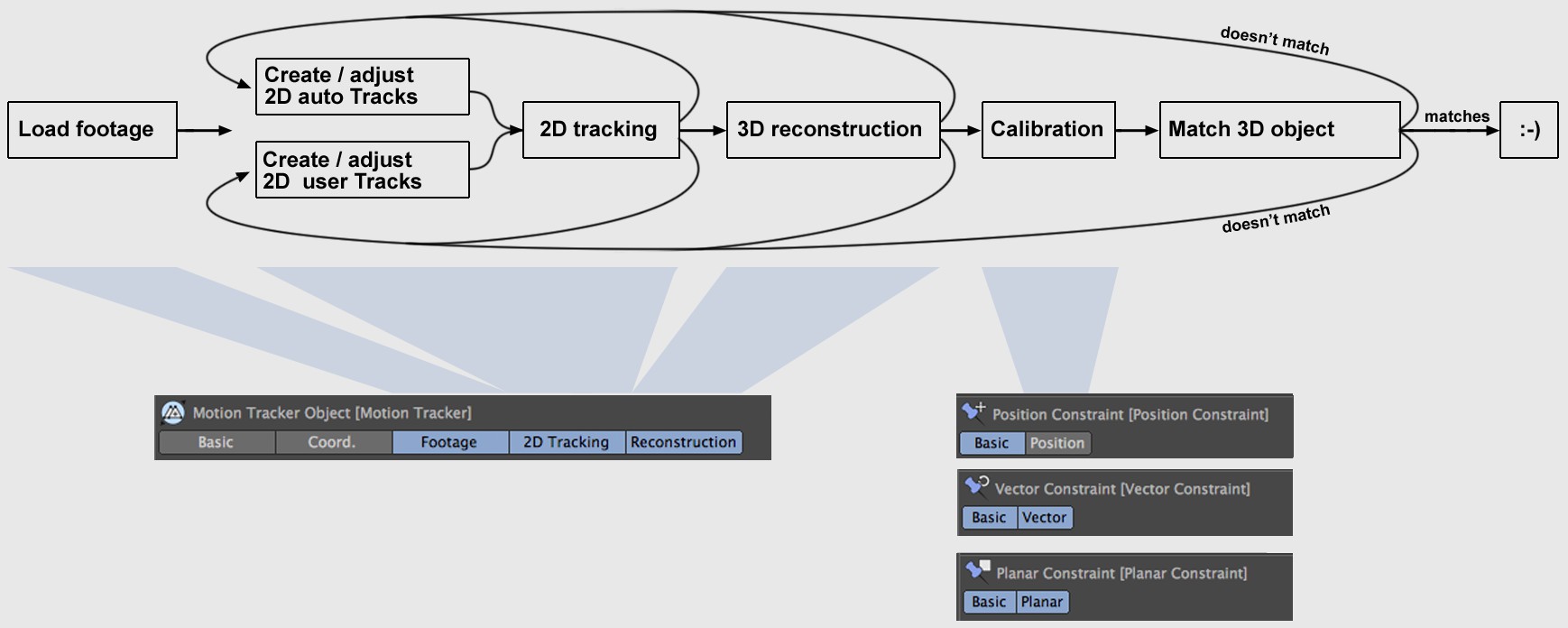 Schéma simplifié du processus
Schéma simplifié du processus
Suivez les étapes suivantes si vous souhaitez reconstruire la caméra à l’aide d’une séquence vidéo :
- Dans le menu principal : sélectionner , puis sélectionner la vidéo à résoudre. Le flux de production présenté dans l’image ci-dessous s’effectuera donc jusqu’à la reconstruction 3D (comprise).
- Si le message Résolution différée terminée s’affiche dans la barre d’état, cela signifie que la reconstruction s’est effectuée sans problème (voir aussi Reconstruction 3D). Vous pouvez à présent utiliser les propriétés Contrainte pour calibrer la reconstruction 3D, puis effectuer un test de rendu pour vérifier la qualité du résultat. Si le résultat ne vous semble pas satisfaisant, ajustez les pistes 2D (voir Comment reconnaître les bonnes pistes des mauvaises pistes?), puis recommencez la reconstruction et la calibration jusqu’à satisfaction.
-
Si la barre d’état n’affiche pas Résolution différée terminée, passez directement à l’ajustement des pistes 2D (voir Comment reconnaître les bonnes pistes des mauvaises pistes?), puis recommencez la reconstruction et la calibration jusqu’à ce que la reconstruction 3D soit satisfaisante.
Il s’agit ici d’une représentation simplifiée du processus. Bien entendu, si vous sélectionnez le mauvais mode de résolution ou si vous définissez une distance focale ou une taille du capteur incorrectes pour l’objet Traqueur de mouvements (onglet Reconstruction), la reconstruction produite sera défectueuse. Toutefois, la tâche la plus importante - et aussi la plus longue à effectuer - reste l’ajustement des pistes 2D.
Généralités
Il n’existe qu’un seul moyen de s’assurer que le processus s’est effectué avec succès : vérifier, une fois l’opération terminée, si les objets 3D ajoutés à la vidéo ont l’air réalistes, c’est-à-dire qu’ils ne sautent pas ou ne se déplacent pas de manière peu naturelle.
Si ce n’est pas le cas, il vous faudra probablement réajuster ou recréer les pistes 2D. Vous pouvez essayer de modifier quelques paramètres, mais le traqueur de mouvements dépend essentiellement de la qualité des pistes. Le traqueur de mouvements essaie de trouver les meilleures avec sa fonction Piste auto, mais au final il vous revient de déterminer quelles pistes sont bonnes et lesquelles sont mauvaises - et combien de nouvelles pistes il vous faudra créer vous-même (voir aussi Comment reconnaître les bonnes pistes des mauvaises pistes?).
Exemple de paramétrage d’une scène
Après avoir reconstruit une caméra, les objets devront être positionnés correctement et équipés des bonnes propriétés.
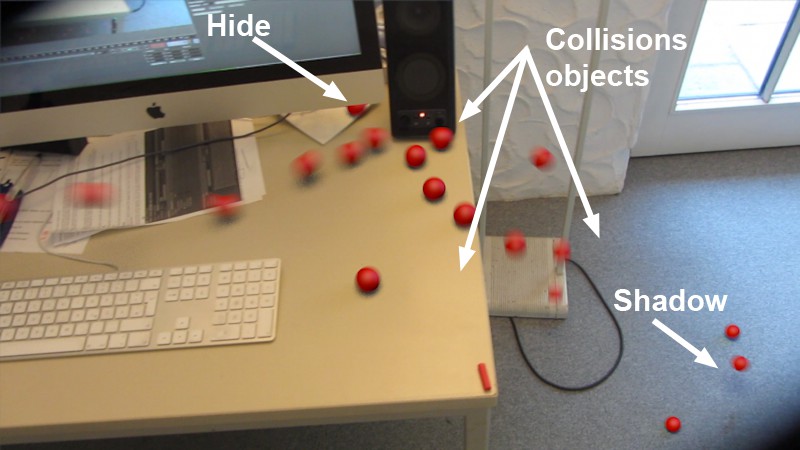 Une invasion de sphères rouges
Une invasion de sphères rouges
Dans cet exemple, un émetteur lance des sphères sur une table ; celles-ci roulent vers le bord de la table, se heurtent à l’enceinte et tombent sur le sol. Cette scène utilise des objets proxy (invisibles) qui servent d’objets de collision pour la simulation dynamique et, dans le cas du moniteur, masquent les sphères situées derrière :
 Plusieurs objets proxy simples placés de manière adéquate permettent de gérer les ombres et les collisions souhaitées.
Plusieurs objets proxy simples placés de manière adéquate permettent de gérer les ombres et les collisions souhaitées.
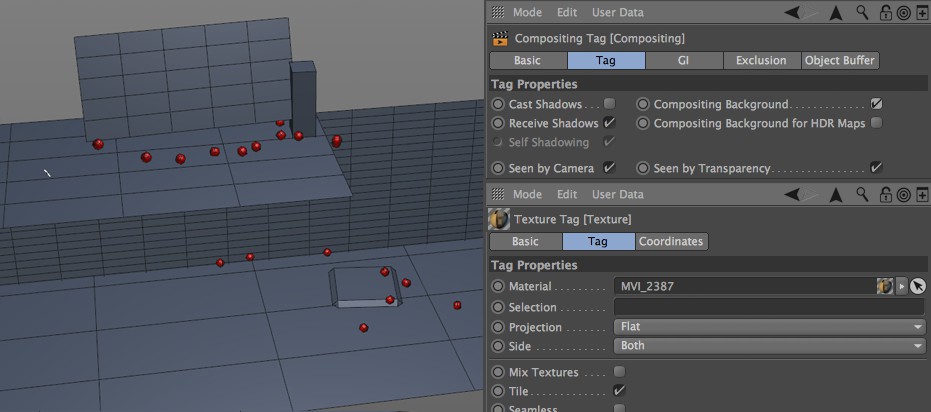
Chaque plan a été orienté en utilisant la fonction Créer plan d’une propriété Contrainte planaire. Remarque : l’outil Pinceau de polygones est également parfait pour cette tâche ; activez la fonction Magnétisme, puis activez ![]() Magnétisme 3D et
Magnétisme 3D et ![]() Magnétisme Axe. Chacun de ces objets proxy possède les propriétés suivantes :
Magnétisme Axe. Chacun de ces objets proxy possède les propriétés suivantes :
- Propriété Rendu avec l’option Composition avec l’arrière-plan activée et l’option Ombres portées désactivée.
- Propriété Texture dont le type de projection de la vidéo est réglé sur frontal.
- Propriété Corps rigide, si nécessaire, pour définir l’objet comme partenaire de collision.
Ces paramètres rendent les objets proxy invisibles au rendu, à l’exception de leurs ombres. Des sources de lumière doivent bien sûr être créées séparément et positionnées correctement pour produire ces ombres.