Colisión
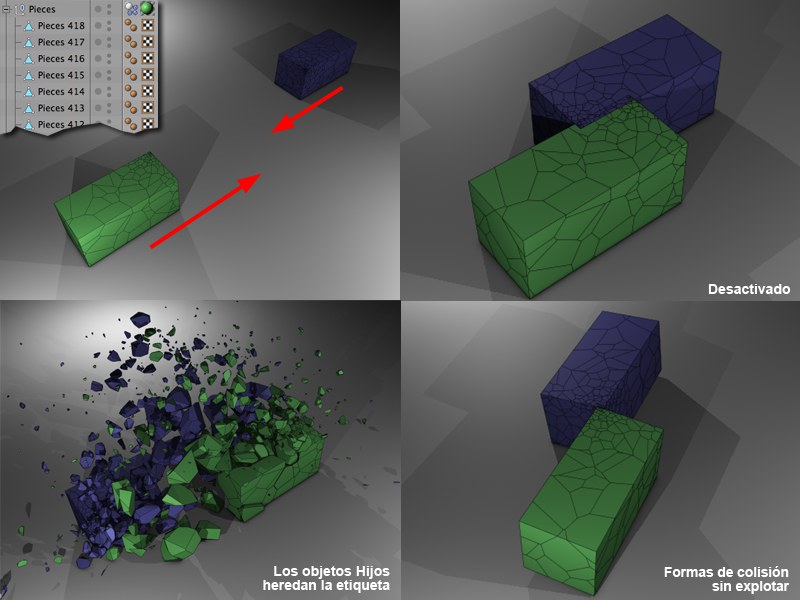 La jerarquía mostrada arriba a la izquierda (la etiqueta está aplicada al Objeto Nulo padre) colisiona con otra del mismo tipo. Las imágenes restantes muestran distintas opciones de Jerarquía.
La jerarquía mostrada arriba a la izquierda (la etiqueta está aplicada al Objeto Nulo padre) colisiona con otra del mismo tipo. Las imágenes restantes muestran distintas opciones de Jerarquía.Esta opción se aplica cuando el objeto al que se le ha asignado la etiqueta tiene su propia jerarquía (y no es un objeto generador de clones, para el que se aplica el menú de selección siguiente) y define si la jerarquía (si la hay) bajo el objeto con la etiqueta debe también incluirse como objeto de colisión.
Todas las jerarquías pertenecientes a la etiqueta se ignorarán con respecto a Dynamics. Sólo colisionará el objeto con la etiqueta, pero sus movimientos "arrastrarán" con él sus objetos Hijos.
Esta etiqueta se asigna a todos los objetos Hijos. Entonces se comportarán independientemente, como si no fueran parte de una jerarquía.
Toda la jerarquía del objeto que tiene asignada la etiqueta se verá como un único objeto fijo.
Puedes asignar una etiqueta Cuerpo Dynamics a un objeto Hijo de una jerarquía. Si desactivas la opción Activado, la etiqueta funcionará como una etiqueta Stop, es decir, este objeto y sus objetos Hijo, por ejemplo, se excluirán de la "forma de colisión compuesta".
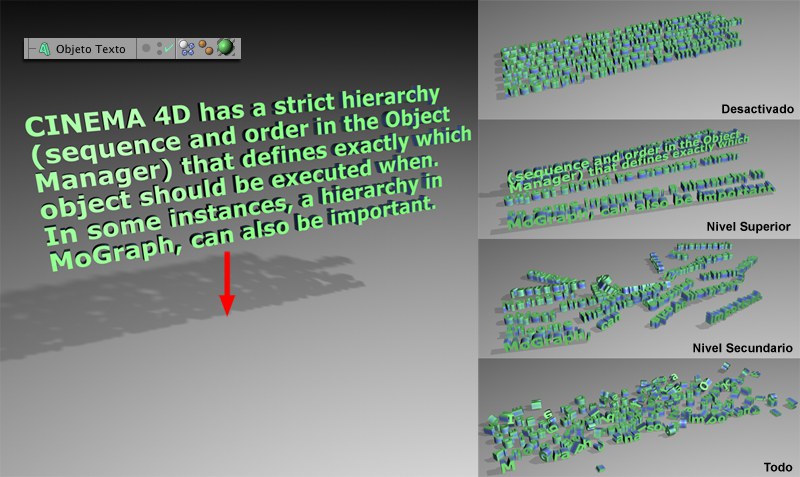 El objeto MoText a la izquierda cae al suelo. Dependiendo de la configuración de Elementos Individuales, el texto colisionará como un todo, por líneas, por palabras o por letras.
El objeto MoText a la izquierda cae al suelo. Dependiendo de la configuración de Elementos Individuales, el texto colisionará como un todo, por líneas, por palabras o por letras.Los modos de este parámetro están diseñados para los Generadores que generan por sí mismos objetos, como MoText. Depende de cómo los objetos deben colisionar: de forma independiente o como un todo.
Por ejemplo, en la MoText de MoGraph, se aplica lo siguiente:
Todo el objeto Texto será un objeto de colisión.
Cada línea de texto será un objeto de colisión individual.
Cada palabra será un objeto de colisión individual.
Cada letra será un objeto de colisión individual.
Esta opción se usa para ajustar lo siguiente:
- Deformaciones Cuerpo Blando, se realizará una petición en los objetos que intersecan. Desactivando esta opción ayudará a optimizar la velocidad de renderizado. Esto sólo debe hacerse si el objeto no tiende a colisionar consigo mismo debido a su forma o a sus parámetros (p.ej. con neumáticos, globos, etc.).
- Si la etiqueta está asignada a un objeto generador de clones (objeto Clonar, objeto MoText, etc.), esta opción define la detección de colisión entre objetos individuales.
Los Objetos colisionadores pueden deformarse usando deformadores, los cuales por supuesto afectan a la forma de la colisión. Ocasionalmente (e.g., con el objeto Fractura Voronoi, el cual puede deformarse usando sus ajustes de la pestaña Detalles) las deformaciones pueden ser menores y deben usarse otros objetos no deformados para acelerar un proceso de colisión. Si este es el caso, esta opción debe estar deshabilitada.
En general, la detección de colisiones es un proceso computacionalmente costoso, pero produce comportamientos realistas en objetos: los objetos pueden repelerse, detenerse debido a la fricción, etc. Cuanto más compleja sea la forma, más costosa computacionalmente hablando será la detección de colisiones. Por eso este menú ofrece formas de sustitución que pueden colocarse alrededor del objeto de colisión. Esto puede ahorrar mucho tiempo de render. A cierta distancia a menudo es muy difícil discernir si se está usando el objeto real o el sustituto para la detección de colisiones durante una animación. Las formas disponibles se encuentran en el menú de opciones Formas de Colisión en la pestaña Colisión.
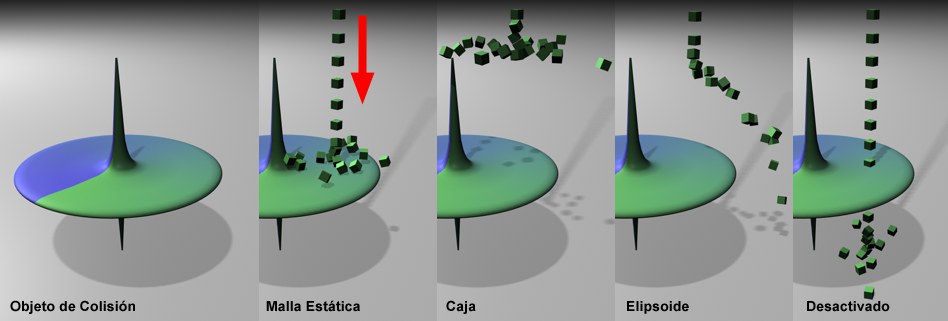 A la izquierda, los clones colisionan con un objeto de colisión. Los clones son repelidos de distintas formas, dependiendo de la opción definida en el menú Forma.
A la izquierda, los clones colisionan con un objeto de colisión. Los clones son repelidos de distintas formas, dependiendo de la opción definida en el menú Forma.Las formas de sustitución disponibles son, en orden de velocidad de renderizado: Caja; Elipsoide; Cilindro, Envolvente Convexa; Malla Estática; Malla en Movimiento.
Se aplica lo siguiente para los modos de abajo: siempre es bueno usar Automático, es posible optimizar tiempos de render con los modos restantes.
Los modos listados abajo (y algunos más, p.ej. el objeto Suelo tiene su propia analogía) se asignarán internamente - automáticamente, dependiendo del objeto usado. Por ejemplo, se asignará automáticamente un modo a las primitivas: a un cubo se le asignará el modo Caja, a un objeto poligonal los modos Malla Estática o Envolvente Convexa, etc. El modo más óptimo para el objeto correspondiente se seleccionará automáticamente. Cambiar a otro modo distinto también puede ayudar a ahorrar tiempo de render. Si, por ejemplo, estás trabajando con varios pequeños objetos esféricos, se les asignará automáticamente en modo Envolvente Convexa, pero podrías también aplicar el modo Elipsoide, que renderizará más rápido y apenas diferirá visualmente.
Esto es principalmente una opción de compatibilidad para cargar escenas antiguas (aplicará Malla Estática en vez de Envolvente Convexa a los objetos correspondientes).
Es equivalente a la caja de delimitación de un objeto, que abarca al objeto con sus dimensiones externas máximas.
En el objeto colisionador se ajustará una elipsoide (un óvalo "volumétrico") que encaja dentro de la caja de delimitación del objeto. En un cubo, por ejemplo, esto sería una esfera que toca los seis lados del cubo.
Cilindro Eje-X
Cilindro Eje-Y
Cilindro Eje-Z
Estas tres opciones están diseñadas principalmente para su uso con formas de colisión redondas. Un objeto de colisión cilíndrico (optimizado internamente) se encajará en la caja de delimitación del objeto. Entonces todo lo que has de hacer es seleccionar el eje correspondiente. Finalmente, decide el eje rotacional de tu modelo redondo como el eje rotacional del cilindro.
Una especie de piel elástica recubrirá el objeto. Por tanto las muescas, cavidades o agujeros no se incluirán en las colisiones.
A parte de Malla Estática, este es el único modo que usa la geometría real del objeto y no una versión simplificada. Se comprobarán constantemente las colisiones del objeto dado en su totalidad, incluso en movimiento.
Ten en cuenta que este modo calculará más lentamente y también tiene otros problemas (p.ej. intersecciones, los objetos pueden apelotonarse, etc.). Si surgen problemas, sugerimos seleccionar la opción Otro Objeto junto con un objeto de sustitución más sencillo.
Este es el modo que más tiempo de render consume después de Malla en Movimiento, porque se usa la geometría real del objeto (y no una versión simplificada).
Sin embargo, todos los objetos afectados por Dynamics de forma activa ( ), se verán como objetos de colisión estáticos (no móviles). El nombre Malla Estática puede tenerse en cuenta de forma literal. Este modo debe usarse cuando, por ejemplo, debe calcularse una esfera mientras objetos huecos y dinámicos rebotan en su interior.
), se verán como objetos de colisión estáticos (no móviles). El nombre Malla Estática puede tenerse en cuenta de forma literal. Este modo debe usarse cuando, por ejemplo, debe calcularse una esfera mientras objetos huecos y dinámicos rebotan en su interior.
El cuerpo no colisionará. Todo los objetos dinámicos atravesarán el cuerpo.
Permite asignar un objeto de colisión sustituyente. Digamos que estás trabajando con un objeto en alta resolución compuesto por millones de polígonos y sólo debe usarse una región específica del objeto para colisiones. Esto sería muy costoso de calcular. Sin embargo, si usas un objeto sustituto cuya forma coincide más o menos con la forma del objeto original, y está compuesto sólo por unos pocos cientos de polígonos, los cálculos pueden acelerarse enormemente. Si se selecciona esta opción, habrá disponible un campo de enlace en el que puede colocarse el objeto sustituto. Ten en cuenta que no importa la ubicación del objeto sustituto - al seleccionarlo, el objeto se posicionará automáticamente en el origen del objeto original.
La forma de colisión (interna) del objeto sustituto se ajusta a las normas descritas arriba (si el objeto no tiene una etiqueta Cuerpo Dynamics, su Forma debería establecerse a Automático). También puedes asignar una etiqueta Cuerpo Dynamics al objeto sustituto para definir con más precisión la forma. Además puedes desactivar la opción Activado.
Arrastra en este campo el objeto de colisión sustituyente (mira el parámetro anterior).
Usa este valor para aumentar (valores positivos) o disminuir (valores negativos) el tamaño del campo de colisión del objeto (al contrario que con el siguiente parámetro, Margen, la forma del objeto se mantendrá). Este parámetro está diseñado para crear efectos específicos. Por ejemplo, un muro de ladrillos cuyos ladrillos flotan en el aire y están separados unos de otros, pero que aún se comporte como un muro real. Este parámetro también puede aplicarse cuando, por ejemplo, se producen penetraciones en los objetos y quieres evitar tener que aumentar el valor Pasos por Fotograma.
Usar Margen de Colisión
Margen [0..+∞m]
Normalmente no hay que modificar estas opciones. El parámetro Margen refleja la opción a nivel de escena de Margen de Colisión, sólo que aquí puedes definirla a nivel de objeto.
El valor también puede reducirse a 0, lo que reducirá el tiempo de render pero también reducirá la estabilidad. Valores de Margen muy bajos también pueden producir que se produzcan penetraciones en los objetos.
Los valores más altos se recomiendan en general si se producen renderizados fallidos y/o colisiones incorrectas. Sin embargo, también puede ayudar aumentar el valor Pasos por Fotograma.
En general, las aristas de las Primitivas se redondearán.
Al contrario que el parámetro Incrementar Tamaño, el parámetro Margen sólo sirve para optimizar la estabilidad de Dynamics.
Mantener Forma del Cuerpo Blando
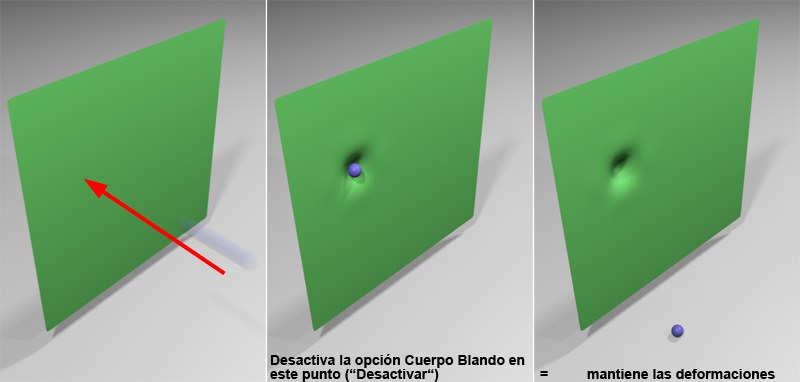 Si se activa, un Cuerpo Blando puede convertirse en un Cuerpo Rígido. Los Cuerpos Blandos tienden a suavizar de nuevo las abolladuras.
Si se activa, un Cuerpo Blando puede convertirse en un Cuerpo Rígido. Los Cuerpos Blandos tienden a suavizar de nuevo las abolladuras.Esta opción es adecuada, por ejemplo, para mantener las abolladuras en las superficies duras (realmente lo opuesto a lo que hace un Cuerpo Nlando). Esta opción no hace más que congelar la forma deformada de un Cuerpo Blando cuando estableces Cuerpo Blando desde
Cuando dos objetos colisionan, este valor es la medida de la fuerza con la que los objetos rebotan entre sí. Valores cercanos a 0 producirán rebotes no elásticos - como si colisionaran dos esferas de plastilina. Valores cercanos a 100% producen un rebote mucho más pronunciado, p.ej., dos bolas de billar al colisionar.
Los valores físicamente correctos van de 0% a 100%.
Ten en cuenta que siempre hay dos valores - uno para cada objeto colisionador. Es decir, si uno de los objetos tiene un valor de Rebote de 0, el segundo no rebotará, incluso si tiene asignado un valor de 1000%.
Si tienes varios objetos que colisionan entre sí, valores bajos producirán que los objetos se detengan de forma más rápida.
Las físicas ofrecen básicamente tres tipos de fricción:
- Fricción Estática
- Fricción Cinética
- Fricción Rotatoria
Las fricciones estática y cinética se combinan en un sólo parámetro en Cinema 4D, Fricción. El parámetro de Fricción es la medida de la fuerza de frenado que se produce en un objeto cuando se desliza sobre una superficie/objeto o de la fuerza que hace que un objeto estacionario comience a deslizar sobre una superficie/objeto. Ambos tipos de fricción miden lo mismo. Ten en cuenta que siempre hay involucrados dos objetos en una ecuación de fricción, y cada uno puede tener definido un valor de fricción distinto. Si un objeto tiene un valor de 0%, la fricción con el otro objeto no podrá aumentarse por muy alto que sea su valor.
En general, cuanto más alto sea el valor (también puede ser mucho mayor que 100%), menos deslizará el objeto o más rodará o se volteará. Si tienes varios objetos que colisionan entre sí, valores bajos producirán que todos los objetos se detengan rápidamente.
Cinema 4D no incluye a propósito la fricción rotatoria. Sin embargo, puede simularse usando Amortiguación Angular.
Comportamiento de colisión. Imagina que se sueltan varios objetos sobre el suelo y sus comportamientos de colisión son todos los mismos. Esto no sería muy realista.
Cuanto mayor sea el valor de Ruido de Colisión, más variado será el comportamiento de los objetos individuales.