고급
이 설정은 클로스 시뮬레이션 동안 솔루션에 대한 클로스 엔진이 솔루션을 얻는 방식을 설정합니다. 여기서 여러분은 서브 샘플링이라든가 클로스 오브젝트에 대한 솔루션의 질량 값과 같은 설정을 발견할 수 있습니다. 클로스 태그 내에서 발견되는 모든 설정은 이러한 설정으로부터 계산됩니다.
이 설정은 클로스 시뮬레이션이 클로스 오브젝트에 대한 솔루션을 얻을 동안 겪는 복잡도를 결정합니다. 충돌이라든지 실 세계에 존재하는 힘들과 같은 것들은 1초를 잘게 자른 단위 정도로 클로스 오브젝트에 영향을 줄 수 있습니다. Cinema 4D는 프레임 단위로 애니메이션을 재생하지만 클로스 엔진은 이러한 프레임 사이에도 계산을 수행할 필요가 있을 수 있습니다. 서브 샘플링 값은 클로스 엔진이 각 프레임 사이에 시뮬레이션에 대한 계산을 얼마나 많이 수행할 것인가를 결정합니다. 숫자가 클수록 보다 정확한 시뮬레이션을 수행할 것이지만 클로스가 시뮬레이션 되거나 재생되는 속도 느려지기 시작할 것입니다.
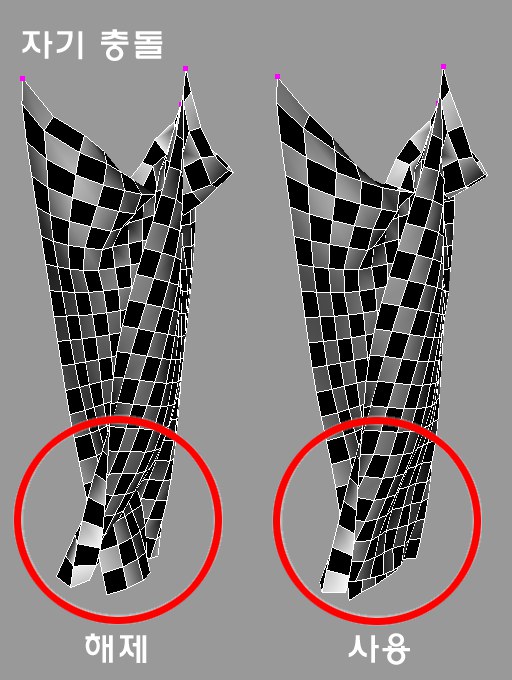
이 옵션은 클로스 오브젝트가 자신의 포인트들에 대한 충돌을 할 수 있도록 합니다. 이것은 클로스가 시뮬레이션 재생될 때 자신의 서페이스로 침투하는 것을 방지합니다. 이 옵션이 켜져 있으면 솔버가 수행해야 하는 계산량 때문에 뷰포트에서의 재생 속도가 느려질 수 있습니다. 과도한 힘이 클로스 오브젝트에 적용될 경우 이러한 힘으로 인해 교차가 발생할 수 있습니다. 자기 충돌(힘 탭)은 클로스가 교차되는 것을 방지시킵니다.
애니메이션 동안 의도된 것이든 우연이든간에 두 다리 캐릭터의 겨드랑이 등과 같은 영역에 클로스 오브젝트가 트랩 될 수 있습니다. 이것은 클로스 엔진이 솔루션을 찾이 못 한 채 멈추게 할 수 있습니다. 전역 교차 해석(Global Intersection Analysis - GIA)는 클로스 엔진 계속하여 시뮬레이션을 진행 할 수 있도록 최적의 솔루션을 찾도록 할 것입니다.
클로스는 일반적으로 어떤 종류의 표면과 충돌하고 있습니다. 그것이 캐릭터의 몸에 충돌하는 셔츠이든, 테이블과 충돌하는 테이블보든간에 대부분의 클로스는 어떤 오브젝트와 충돌할 것입니다. 클로스 엔진은 클로스가 시뮬레이션 될 때마다 이러한 수많은 요소를 계산할 것입니다. 클로스 엔진이 지오메트리에 대한 충돌을 어떤 식으로 계산할 것인지는 해당 폴리곤 지오메트리 타입의 옆에 체크마크를 표시함으로써 수동으로 지정할 수 있습니다. 디폴트로, 포인트, 엣지, 폴리곤은 켜지게 되겠지만 어떠한 지오메트리 타입도 꺼질 수 없습니다.
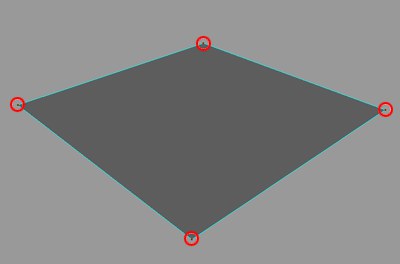
이 옵션이 켜져 있을 경우 클로스 엔진은 클로스 오브젝트의 지오메트리의 모든 포인트에 대한 충돌을 계산할 것입니다. 이것은 일단 클로스 오브젝트에 속한 어느 포인트든지 표면과 충돌하게 되면 표면을 통과하지 못하도록 하는 것을 의미합니다.
이 설정을 클로스 오브젝트의 각 포인트를 둘러싸고 있는 가상의 필드라고 생각해 보십시오. 감지거리가 클수록 클로스의 포인트들이 충돌 오브젝트의 포인트들과 충돌하는 거리가 보다 멀어집니다. 만약 포인트들이 충돌 오브젝트로 떨어진다면 포인트 충돌 감지거리 설정은 증가되어야 합니다.
감지거리가 클수록 클로스의 포인트들이 충돌 오브젝트의 포인트들과 충돌하는 거리가 보다 멀어집니다.
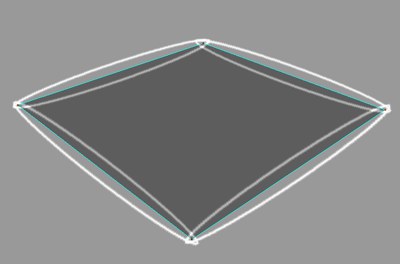
이 옵션이 켜질 경우 클로스 엔진은 클로스 오브젝트 지오메트리의 모든 엣지에 대한 충돌 연산을 수행할 것입니다. 이것은 일단 클로스 오브젝트에 속한 어떤 엣지라도 다른 서페이스에 충돌하게 되면 그 엣지가 서페이스를 통과하지 못하도록 할 것입니다.
이 설정을 클로스 오브젝트의 각 엣지를 둘러싸고 있는 가상의 필드라고 생각해 보십시오. 감지거리가 클수록 클로스 엣지들이 충돌 오브젝트의 엣지들과 충돌하는 거리가 보다 멀어집니다. 만약 엣지들이 충돌 오브젝트로 떨어진다면 포인트 엣지 감지거리 설정은 증가되어야 합니다.
감지거리가 클수록 클로스의 엣지들이 충돌 오브젝트의 포인트들과 충돌하는 거리가 보다 멀어집니다.
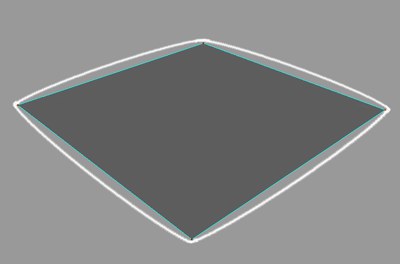
이 옵션이 켜질 경우 클로스 엔진은 클로스 오브젝트 지오메트리의 모든 폴리곤에 대한 충돌 연산을 수행할 것입니다. 이것은 일단 클로스 오브젝트에 속한 어떤 폴리곤이라도 다른 서페이스에 충돌하게 되면 그 폴리곤이 서페이스를 통과하지 못하도록 할 것입니다.
이 설정을 클로스 오브젝트의 각 폴리곤을 둘러싸고 있는 가상의 필드라고 생각해 보십시오. 감지거리가 클수록 클로스 폴리곤들이 충돌 오브젝트의 폴리곤들과 충돌하는 거리가 보다 멀어집니다. 만약 폴리곤들이 충돌 오브젝트로 떨어진다면 폴리곤 엣지 감지거리 설정은 증가되어야 합니다.
감지거리가 클수록 클로스의 엣지들이 충돌 오브젝트의 포인트들과 충돌하는 거리가 보다 멀어집니다.
이 박스 내에 오브젝트를 넣으면 그 오브젝트는 계산에 포함될 것입니다. 이 필드가 비어있으면, 모든 오브젝트들이 포함됩니다. 대부분의 상황에서 씬 내에 위치한 다중의 클로스 혹은 다중의 충돌 오브젝트가 존재할 것입니다. 이 박스는 여러분이 어떤 클로스나 충돌 오브젝트가 클로스 태그에 대한 계산에 포함되어야 할 지를 개별적으로 정의할 수 있도록 합니다. 클로스 엔진 또한 Cinema 4D의 파티클 시스템에서 다음 힘(force) 필드와 함께 동작합니다.
- 인력
- 중력
- 회전
- 터뷸런스
- 바람 다른 모든 파티클 제어자들은 영향을 줄 수 없습니다.
일반적으로 다른 타입의 힘 필드가 공간상에서 서로 겹치면 힘은 서로 합쳐질 것입니다. 그러나 어떤 경우에는 힘이 상호간의 효과를 상쇄되거나 배가시킬 수 있습니다.